Навигация
Структуры типовых регуляторов
11379
знаков
0
таблиц
7
изображений
Реферат
по дисциплине "Автоматическое управление и средства автоматизации"
на тему "Структуры типовых регуляторов"
Курчатов 2008
Содержание
Введение
Структуры типовых регуляторов
1. П-регулятор
2. ПД-регулятор
3. ПИ-регулятор
4. ПИД-регулятор
Заключение
Список литературы
Введение
Каждый контур регулирования обобщенно можно рассматривать как систему, состоящую непосредственно из самого объекта регулирования и регулятора, который через исполнительное устройство может влиять на регулируемый параметр объекта.
Каждый регулятор можно охарактеризовать:
– законом, на основе которого осуществляется регулирование;
– типами входных сигналов (первичных датчиков);
– типами выходных сигналов управления (исполнительных устройств);
– способом задания установки регулирования;
– дополнительными возможностями (дополнительные функции, дополнительные входы/выходы).
По закону регулирования они делятся на двух- и трехпозиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально-интегральные и пропорционально-интегрально-дифференциальные регуляторы — сокращенно И, П, ПД, ПИ и ПИД-регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы.
Рассмотрим структурные схемы автоматических регуляторов с типовыми сервоприводами, воспроизводящие основные законы регулирования методом параллельной и последовательной коррекции.
Структуры типовых регуляторов
1. П-регулятор
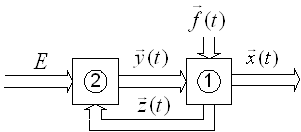
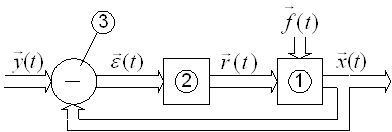
Функциональная схема П-регулятора с сервоприводом с пропорциональной или интегральной скоростью перемещения изображена на рис. 1.
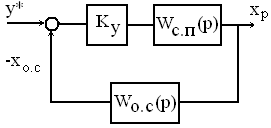
Рис. 1. Структурная схема регулятора, состоящего из усилителя, сервопривода и отрицательной обратной связью
Отрицательная обратная связь в регуляторе осуществляется по положению регулирующего органа путем подачи на вход устройства обратной связи сигнала с выхода сервопривода. Конструктивно обратная связь осуществляется с помощью механической, электрической или другой передачи в зависимости от типов сервопривода и командно-усилительного устройства. Характеристики П-регуляторов (операторная и частотная) имеют вид:
Wр(р) = 1 ⁄ W о.с (р); Wр (iщ) = 1 ⁄ Wо.с (iщ) (1.1)
Для того, чтобы приведенное выше выражение было тождественно уравнению пропорционального регулятора xр = Kрy*, необходимо выполнить условие:
W о.с (р) = Xо.с (р) ⁄ xр (р) = 1 ⁄ Kр (1.2)
В соответствии с этим условием обратная связь должна выполняться на базе безинерционного усилительного звена. Коэффициент усиления звена обратной связи kо.с = д = 1 ⁄ Kр называют степенью жесткой (т. е. неизменной во времени) обратной связи.
П-регуляторы имеют орган настройки для изменения д (Kр), который служит параметром его настройки. Переходная характеристика реального П-регулятора (рис. 2) несколько отличается от идеального в начальной своей части из-за ограниченной скорости сервопривода.

Рис. 2. Кривая переходного процесса П-регулятора
2. ПД-регулятор
Функциональная схема ПД-регулятора представлена на рис. 3, а. Дифференцирующая составляющая формируется специальным прибором — дифференциатором, обладающим характеристикой реального дифференцирующего звена. На его выходе формируется сигнал, пропорциональный скорости изменения регулируемой величины.
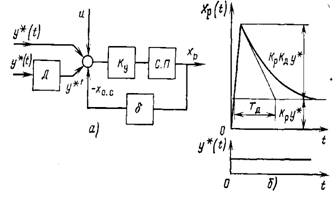
Рис. 3. ПД-регулятор: а — структурная схема; б — кривая переходного процесса
Скоростной сигнал суммируется с сигналом по отклонению регулируемой величины. Результирующий сигнал поступает на вход усилителя. Усилитель и сервопривод охватываются жесткой отрицательной обратной связью. В замкнутом контуре усилитель— привод — обратная связь формируется П-закон регулирования с коэффициентом усиления Kр. Динамическая характеристика реального ПД-регулятора имеет вид
![]()
![]()
Переходная (временная) характеристика ПД-регулятора с сервоприводом с ограниченной скоростью изображена на рис. 3, б и представляет собой сумму временных характеристик пропорционального и реального дифференцирующего звеньев. Параметром настройки собственно регулятора служит Kр (степень обратной связи д); параметрами настройки дифференциатора служат коэффициент усиления Кд и постоянная дифференцирования Тд, произведение которых характеризует степень ввода дифференциальной составляющей в ПД-закон регулирования.
Похожие работы

... МПа, пределы измерений 0…1,6 МПа МС-П2 3 по месту Приборы в спецификации могут быть сгруппированы по позициям на схеме или по маркам. Часть 3. Современные системы управления производством. 1. Структура АСУ ТП. Характерной особенностью развития современной электронной промышленности является бурный рост, сопровождающийся столь же бурным снижением стоимости средств ...
... мероприятия по обеспечению однородности выпускаемой продукции. Все эти мероприятия можно объединить в четыре группы: 1. совершенствование технологии производства; 2. автоматизация производства; 3. технологические (тренировочные) прогоны; 4. статистическое регулирование качества продукции. 2.10. Проектирование технологических процессов с использованием средств ...


... . В результате, на выходе реле сигнал будет непрерывным, но ступенчатым 3.2.2.3 Релейно-импульсные системы В них происходит квантование сигналов по времени и по уровню. К этому типу относятся цифровые системы управления, в частности АСУТП с используемым ВК. При большом количестве разрядов АЦП и ЦАП квантованием можно пренебречь, и отнести такие системы к импульсным. 3.2.2.4 Системы на ...
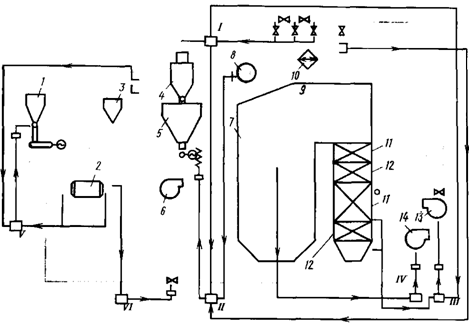

... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
0 комментариев