Основные типы локальных регуляторов
Системы на переменном токе
Управляемость систем
Разностные уравнения
Преобразование Лапласа непрерывных функций
Математические модели систем управления в пространстве состояний
Интегрирующее звено
Дифференцирующее звено второго порядка
Неустойчивое периодическое звено
Неминимально-фазовое дифференцирующее звено первого порядка
Звено чистого запаздывания
Решение уравнения состояния
Передаточная функция
Переходная функция
Дискретная передаточная функция импульсной системы с экстраполятором нулевого порядка
Частотные характеристики
Дискретные системы
Дискретные системы
Навигация
Управление сложными системами
Управление сложными системами
55819
знаков
37
таблиц
113
изображений
Лекция №1. 11.02.2003
Раздел 1. Основные понятия теории сложности
1.1. Сложность
Сложность — свойство современных систем управления.
Различают следующие понятия сложности:
1) Математическое
2) Информационное
3) Структурное
4) Обобщенное
5) Алгоритмическое
6) и др.
Математическое понятие относится к теории конечных автоматов. 50-е гг XX века. Основная характеристика сложности системы — число элементарных блоков, образующих систему.
Информационное понятие введено Колмогоровым и относится к теории информации. Сложность здесь связана со случайностью. Основная характеристика сложности системы — спектр частот. Вроде бы такого понятия достаточно для оценок свойств системы, но все же есть недостаток: не учитываются комбинации подсистем в системе.
В структурном понятии учитываются взаимосвязи между подсистемами в системе. Систему формируют таким образом, чтобы она обладала определенными статическими и динамическими характеристиками. Основная характеристика сложности системы — статические (установившееся состояние системы) и динамические (переходные режимы системы) свойства системы.
При реализации системы стремятся использовать наиболее простые технические средства. Таким образом, косвенно учитываются требования надежности и стоимости. Учет надежности и экономичности на этапе проектирования делает эту задачу более корректной. Кроме того, любая задача должна быть математически корректной (математическая корректность — сходимость алгоритмов управления). Неустойчивость алгоритмов обусловлена 1) неточностью исходных данных, 2) неточностью их реализации в компьютере на этапе проектирования или в ВК (вычислительном Комплексе) при работе с системой.
В обобщенном понятии основная характеристика сложности системы — шкала сложности. Основные признаки построения шкалы сложности:
— порядок дифференциального оператора
— спектр частот
— основные характеристики ВК
— надёжность
— стоимость
— алгоритмическая сложность
— и др.
1.2 Иерархия
Когда проблемой является определение свойств системы по характеристикам отдельных подсистем, используется иерархический подход, позволяющий решить эту проблему.
Основные признаки иерархии:
1. Сложные иерархические структуры являются многоуровневыми, на определенных уровнях которых принимаются решения;
2. Общая (глобальная) и местная (локальная) цели функционирования должны координироваться;
3. Между уровнями системы происходит обмен информацией, при этом приоритетом обладает информация, поступающая с верхнего уровня. Для нижнего уровня она является командной и подлежит выполнению, если это возможно;
4. Процесс обмена информацией снизу вверх в структуре замедляется.
1.3 Типовая структура сложной системы
Обобщенную структуру сложной системы можно представить в виде треугольной структуры (смотри рисунок №1).
Уровни: О, 1, 2, 3, 4.
О — объект управления, который тоже является сложным, например, состоящим из восьми подсистем О.1 – О.8.
На рисунке №1:
Х1 – Х8 — регулируемые переменные.
r1 – r8 — регулирующее воздействие.
И — информация. У — уставка, управления.
1 — уровень локального регулирования.
Используются аналоговые или цифровые (например, микропроцессорные системы из следующего семестра) Системы Автоматического Регулирования (САР), которые осуществляют непосредственное регулирование объектами О.1 – О.8.
2 — уровень локальной оптимизации.
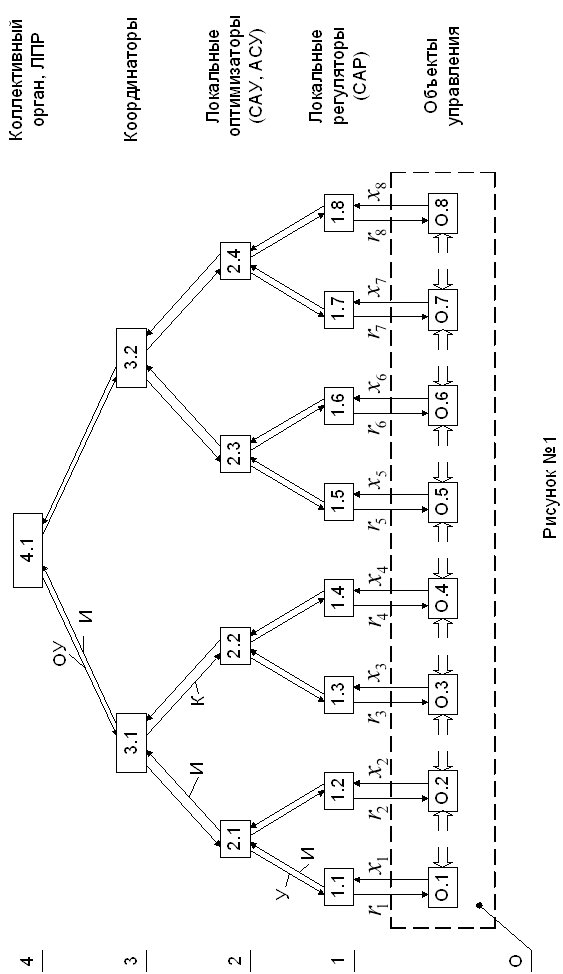

Рисунок №2
Здесь оптимизаторы Системы Автоматического Управления (в них уставка вырабатывается ВК) или Автоматизированные Системы Управления (в них уставка определяется человеком совместно с ВК, который нужен для усиления интеллекта человека) осуществляют оптимальное управление локальными регуляторами первого уровня в соответствии с частными критериями.
3 — уровень координации.
Здесь реализуется второй признак иерархии.
4 — уровень оперативного управления
ЛПР — лицо, принимающее решение.
Общая цель работы системы трансформируется в конкретные уставки нижним уровням, распределяются ресурсы, принимаются решения в нештатных ситуациях и др.
Основой для решения являются мощные ВК и «быстрые» математические модели.
1.4 Эквивалентная структура сложной системы (Даймонд–структура)
Структуру треугольного типа можно представить в виде структуры ромбовидного типа (смотри рисунок №2).
В данной структуре разделены информационная и управляющая (уровни принятия решения) функции.
1. Такое преобразование обеспечивает наглядность, так как разделены информационная и управляющая функции.
2. Возможность выполнять вертикальный разрез системы и проводить анализ и синтез динамических структур САУ или АСУ.
3. Выполнять горизонтальное сечение и решать задачи статического расчета на заданном уровне (информационном или управляющем).
4. Формализовать процессы информационные и управляющие, что облегчает работу математической модели системы.
На рисунке №2:
~ ~
1.1 – 1.8 — датчики (измерительные устройства локальных регуляторов).
~ ~ ~ ~ ~
2.1 – 2.4; 3.1 – 3.2; 4.1 — информационные системы соответствующих уровней.
/\ /\
1.1 – 1.8 — собственно локальные регуляторы САР без датчиков.
/\ /\ /\ /\ /\
2.1 – 2.4; 3.1 – 3.2; 4.1 — соответствующие подсистемы без информационных подсистем.
АСУ — характерный пример сложной системы (СС). В частности АСУТП.
Раздел 2. АСУТП.
АСУТП — человеко-машинная система, обеспечивающая сбор и обработку информации для оптимизации управления технологическим (техническим) процессом (объектом) в соответствии с принятым критерием.
Лекция №2. 12.02.2003
2.1Фнукции АСУТП
1) Информационные (обеспечивают сбор, обработку и представление информации персоналу);
2) Управляющие (на основе полученной информации выработка оптимальных управляющих воздействий и их реализация);
3) Вспомогательные (внутрисистемные задачи по функционированию технических и программных средств).
2.2 Структура АСУТП
Структуру системы образуют:
1. Оперативный персонал.
2. Техническое обеспечение.
3. Информационное обеспечение.
4. Организационное обеспечение.
5. Математическое обеспечение.
6. Программное обеспечение.
7. Лингвистическое обеспечение.
8. и др.
1) Оперативный персонал — группа операторов (диспетчеров), которые осуществляют контроль и управление объектом (или процессом), а также эксплуатационный персонал, обеспечивающий работу программных и технических средств.
2) Техническое обеспечение — комплекс технических средств АСУТП, в том числе и ВК.
3) Информационное обеспечение — совокупность реализованных решений по объемам, размещению и формам организации информации, циркулирующей в системе. Оно определяет формы и способы представления информации по состоянию системы (в виде баз данных, файлов ВК, других документов и сигналов для представления персоналу).
4) Организационное обеспечение — совокупность документов, регламентирующих деятельность персонала в АСУТП.
5) Математическое обеспечение — совокупность математических методов, моделей и алгоритмов, используемых при проектировании и работе системы.
На этапе анализа информации и принятия решения необходимо формулировать задачи управления математически. Для этого необходимы:
— Математическая Модель (ММ);
— Критерий управления;
— Учет ограничений.
ММ — совокупность математических отношений, описывающих поведение объекта и условия его работы.
Для составления ММ необходимо знать физическую природу явления, структуру и особенности объекта. Любая ММ неадекватна и трудоёмка.
Неадекватность (приближенность):
— неточность основных законов;
— определяется техническим средством — ВК.
При “закладке” ММ в компьютер приходится прибегать к упрощениям. Разработка ММ может занимать до 60 – 80 % общего времени проектирования системы.
Алгоритм — инструкция решения данной задачи, выраженная на языке математических формул и логических условий.
Алгоритм управления — инструкция для получения целесообразных управляющих воздействий, в которой говорится о том, как надо обрабатывать информацию об объекте.
6) Программное обеспечение делится на общее (сопровождают данные ВК) и специальное (разрабатывается для конкретной системы и для реализации основных функций этой системы).
7) Лингвистическое обеспечение — совокупность языковых средств формализации естественного языка обеспечения персонала ВК.
Основное требование: язык должен быть лаконичен, быстро и однозначно воспринимаем.
2.3 Типовая функциональная схема и примеры АСУТП
Множество АСУТП можно классифицировать по различным признакам, в том числе по роли человека–оператора и ВК. Распределение функций между ними осуществляется на этапе предварительного проектирования. Более совершенна та система, где максимум функций выполняет ВК.
1 — Человек оператор
2 — ВК
3 — Объект управления
4 — Система отображения информации
5 — Пульт или пост управления
6 — Устройство логического управления
7 — Локальные регуляторы
8 — Исполнительные устройства
9 — Измерительные устройства
10 — АСУТП более высокого уровня
11 — Система сигнализации
12 — Система аварийной защиты
13, 14 — Функциональные связи

2.3.1 АСУТП с информационным типом функционирования
В данном случае нет связей 13 и 14.
ВК, получая информацию, обрабатывает её и с помощью СОИ (Систем Отображения Информации) представляет человеку–оператору. Оператор анализирует информацию и принимает решение, воздействует на объект при помощи технических средств №№ 5, 6, 7, 8.
ВК выполняет следующие функции:
1. Сбор информации для уточнения ММ.
2. Рассчитывание технических и технико-экономических показателей.
3. Контроль работы системы.
4. Связь с АСУТП более высокого уровня.
Следовательно, система существенно зависит от человека–оператора.
2.3.2 АСУТП с функционированием в режиме “советчика”
В данном случае нет связей 13 и 14.
ВК рассчитывает возможные варианты решения (уставки), которые предлагаются оператору. Оператор анализирует их и выбирает более рациональную уставку.
В такой системе влияние оказывает субъективный фактор человека–оператора.
2.3.3 АСУТП с супервизорным управлением
В данном случае используется функциональная связь 13, а 14 отсутствует.
ВК рассчитывает уставки локальным регулятором (7). Человек–оператор, находясь вне основного контура, контролирует работу системы и вмешивается в процесс по мере необходимости.
2.3.4 АСУТП с непосредственным цифровым управлением
В данном случае используется функциональная связь 14, а 13 отсутствует.
ВК рассчитывает не уставки, а необходимые управляющие воздействия на объект, которые реализуются исполнительными устройствами (8). При этом локальные регуляторы, выносящиеся за пределы контура, являются дополнительными.
2.35 Комбинированные АСУТП
Пример — смотри ДЗ.
Раздел 3. Локальные оптимизаторы и регуляторы
3.1 Обобщенная структура локального оптимизатора САУ. Проблемы управления
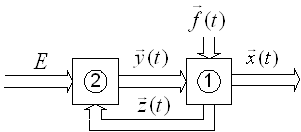
1 — управляемая система; 2 — управляющая система.
Пусть известны:
1. Цель управления (Е) в виде показателя — функционала. ![]() (1)
(1)
2. Математическая модель в виде системы дифференциальных уравнений ![]() (2)
(2)
3. Ограничения:  (3)
(3)
Изменение векторов состояния ![]() , управления
, управления ![]() ограничено замкнутыми областями А и В, которые в свою очередь являются составляющими соответственно пространств состояний Х и управления Y.
ограничено замкнутыми областями А и В, которые в свою очередь являются составляющими соответственно пространств состояний Х и управления Y.
Тогда: Проблема управления состоит в определении такого вектора управления ![]() , который обеспечивал бы экстремум функционала (1) при известных ММ (2) и ограничениях (3).
, который обеспечивал бы экстремум функционала (1) при известных ММ (2) и ограничениях (3).
![]() — многомерные векторные функции соответствия
— многомерные векторные функции соответствия
![]() — состояния;
— состояния; ![]() — управления;
— управления; ![]() — наблюдения;
— наблюдения; ![]() — возмущения.
— возмущения.
То есть  , — переменные состояния.
, — переменные состояния.
![]() — наблюдаемые переменные, то есть переменные состояния, информация об изменении которых поступает в управляющую систему.
— наблюдаемые переменные, то есть переменные состояния, информация об изменении которых поступает в управляющую систему.
Лекция №3. 18.02.2003
 — управляющие воздействия (уставки).
— управляющие воздействия (уставки).
![]() — возмущающие воздействия.
— возмущающие воздействия.
3.2 Обобщенная структура локального регулятора САР. Проблемы управления.
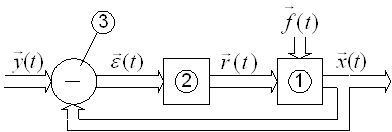
1 — объект регулирования;
2 — регулятор (контроллер);
3 — устройство сравнения.
![]() — вектор регулирования;
— вектор регулирования;
![]() — регулирующее воздействие.
— регулирующее воздействие.
![]() — вектор ошибки.
— вектор ошибки.
В данном случае:
1. ![]() — известен.
— известен.
2. ![]()
3. Показатель точности ![]()
Тогда: Проблема регулирования состоит в определении такого вектора регулирования ![]() (алгоритма), который обеспечивал бы минимум n частных показателей эффективности
(алгоритма), который обеспечивал бы минимум n частных показателей эффективности ![]() , каждый из которых зависит от одной из составляющих вектора ошибки, при изменяющихся связях (2) и ограничениях (3).
, каждый из которых зависит от одной из составляющих вектора ошибки, при изменяющихся связях (2) и ограничениях (3).
Задача регулирования — это частный случай проблемы управления, а локальный регулятор является объектом локального оптимизатора (смотри Рисунки №№1, 2).
3.2.1 Типовая функциональная схема локального регулятора. Состав элементов
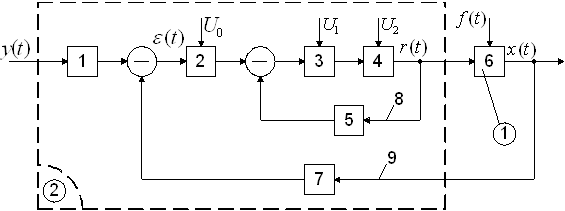
![]() — источники энергии.
— источники энергии.
1 — преобразующее устройство;
2 — последовательное корректирующее устройство (аналоговое или цифровое (микропроцессор)) (придаёт системе требуемые свойства);
3 — усилительное устройство;
4 — исполнительное устройство;
5 — параллельное корректирующее устройство (включается встречно-параллельно и охватывает звенья подсистемы с наиболее неблагоприятными свойствами);
6 — объект регулирования;
7 — элемент (устройство) главной обратной связи;
8 — местная обратная связь;
9 — главная обратная связь.
Локальные регуляторы содержат в своей структуре измерительные, усилительные, исполнительные и корректирующие устройства. Пример системы: смотри ДЗ.
Следовательно, САР — замкнутая динамическая система использования получающихся сигналов для управления источниками энергии, стремящаяся сохранить в допустимых пределах ошибки между требуемыми и действительными значениями регулируемых переменных путем их сравнения.
Похожие работы
... существует внутренний механизм целеполагания. Наука, которая первой начала исследование подобных систем, получила название кибернетики. Кибернетика Кибернетика (от греч. kybernetike - искусство управления) — это наука об управлении сложными системами с обратной связью. Она возникла на стыке математики, техники и нейрофизиологии, и ее интересовал целый класс систем, как живых, так и неживых, ...
... действие внутренних тенденций, и система сама построит необходимую структуру. Нужно только знать потенциальные возможности данной среды и способы их стимуляции. В основе синергетического подхода к управлению социальными системами – механизм резонансных направляющих воздействий на нелинейную систему, в ходе развития которой всегда существует область параметров и стадий, в рамках которых нелинейная ...
... полномочий. Оперативность структуры означает возможность реакции системы на изменения обстановки, временные показатели этой реакции и ее цену. Типичным примером организации как сложной системы является производственно-экономическая система (ПЭС). Основным видом производственно-экономических систем является предприятие. Приведем, применительно к промышленному предприятию, некоторые необходимые ...
... , учитывая, что окружение будет меняться. Смысл стратегического управления в определении и осуществлении действий предприятия в настоящее время для обеспечения достойного будущего, а не разработка действий, которые будет осуществлять организация в дальнейшем. 1.2 Особенности стратегического подхода к управлению Стратегический подход к управлению не является идеальным решением дальнейшего ...
0 комментариев