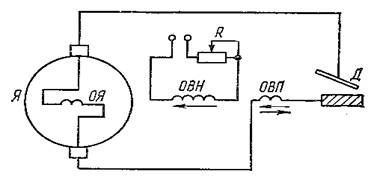
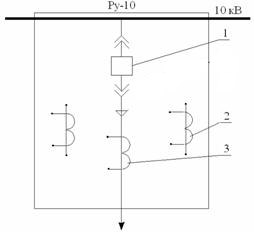
Функциональная схема САР напряжения сварочной дуги
Система дифференциальных уравнений
Взвешенный сигнальный граф и структурная схема линейной математической модели САР
Определение передаточных функций САР напряжения сварочной дуги
Определение сквозной передаточной функции САР по взвешенному сигнальному графу с помощью преобразования структурных схем (см.Рисунки12-19)
Навигация
Взвешенный сигнальный граф и структурная схема линейной математической модели САР
Система автоматического регулирования напряжения сварочной дуги
39824
знака
0
таблиц
18
изображений
6. Взвешенный сигнальный граф и структурная схема линейной математической модели САР
Для определения закона изменения во времени данной выходной величины необходимо исключить из системы уравнений все остальные переменные, являющиеся в данном случае промежуточными, и получить дифференциальное уравнение, связывающее рассматриваемую выходную переменную с входной, представленной заданной функцией времени в правой части уравнения.
Операции исключения промежуточных переменных из сложных дифференциальных уравнений очень трудоемки и громоздки. Поэтому возникает потребность упростить эти операции. С этой целью в линейных математических моделях САУ обычно используют операционную форму записи линейных дифференциальных уравнений, представляя уравнение каждой связи сигнального графа в виде так называемой передаточной функции.
Замена дифференциальных уравнений передаточными функциями позволяет представить систему линейных дифференциальных уравнений САУ в виде взвешенного сигнального графа, либо в виде структурной схемы.
Существенным ограничением на применение передаточных функций при исследовании линейных САУ является то обстоятельство, что передаточная функция линейного дифференциального уравнения ставит в соответствие каждой конкретной функции в правой части (входному сигналу) одно решение дифференциального уравнения, удовлетворяющее нулевым начальным условиям.
Для перехода к операторной форме записи необходимо оператор дифференциального уравнения d/dt заменить символом p, с которым в дальнейшем можно поступать как с сомножителем.
В операторной форме записи дифференциальное уравнение

примет вид ![]()
Вынеся переменные x(t)и y(t) за скобки в левой и правой частях, получим операторную форму дифференциального уравнения:
![]()
По своей форме это уравнение является алгебраическим, а не дифференциальным. Разрешим его относительно искомой переменной x(t), разделив обе части ни сомножитель ![]()

Мы получили очень наглядную запись линейного дифференциального уравнения.
Искомая переменная x(t) представлена как результат умножения независимой переменной y(t) на символический коэффициент

Этот коэффициент W(p) называется передаточной функцией данного дифференциального уравнения. Передаточная функция условно и в то же время наглядно отражает структуру и численные значения коэффициентов дифференциального уравнения, связывающего две переменные - независимую (входную) y(t) и искомую (выходную) x(t):
![]()
Таким образом, передаточная функция - его один из удобных способов записи линейного дифференциального уравнения.
Запишем в операторной форме систему линеаризованных дифференциальных уравнений исследуемой САР. Коэффициенты, возникающие при переходе к операторной форме записи, будем нумеровать по порядку К1, К2, К3,…(большими буквами без штрихов, нумерованные по порядку возрастания). Постоянные времени будем также нумеровать по порядку их возникновения Т1, Т2,…
Если уравнение не является дифференциальным, то его вид не изменяется:
1) u1=K1х+ K2u3;
W1(p )=K1. W2(p )=K2.
где K1=.K'1 и K2.=K'2

2) Заменим оператор дифференцирования в левой части сомножителем р и вынесем за скобки переменную iвг. Разрешив полученное уравнение относительно iвг, получим запись дифференциального уравнения в виде передаточной функции:
![]()
![]()
где ![]()
3) j1=K6 i; W4(p)=K6, где К6=К5'.
4) j=j1+j2

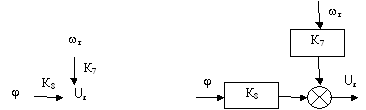
5) uя=K8j+K7wг ; W5(p)=K7; W6(p)=K8, где К7 =K'7, K8=K'6.
6) ![]()
![]()
![]()
где ![]()

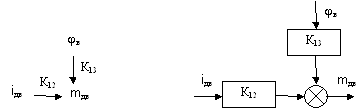
7) mqв=K12iдв+K13jв; W8(p)=K12; W9(p)=K13, K12=K'10, K13=K'11.
8) ![]()
![]()
![]()

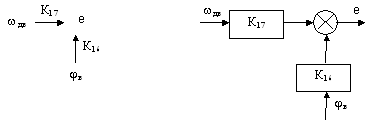
9) е=K17w г+K16jв;
W12(p)=K17; W11(p)=K16, где K16=K'13, K17=K'14.
10) jв=K18iв; W13(p)=K18, где K18=K'15.
11) ![]()
![]()
где 
12) ![]()
13) ![]()
![]()
где 
14) ![]()
15) ![]() ;
;
![]()

16) ![]()
17) uд=K30iд+ K31rд;
W21(p )=K30. W22(p )=K31.
где K30=.K'28 и K31.=K'29

18) ![]()
19) ![]()
![]()
где 
20) j2=K36i2; W25(p)=K26, K36=K'33
21) uс=K37 uт ; W26(p)=K37, K37=K'34
22) ![]()
Взвешенный сигнальный граф и структурная схема являются эквивалентными формами наглядного графического представления системы линейных дифференциальных уравнений САР. Как взвешенный граф, так и структурная схема используют запись дифференциальных уравнений связей в виде передаточных функций.
Взвешенный сигнальный граф по своей структуре почти полностью совпадает с исходным сигнальным графом (Рисунок 3), каждому его ребру приписан вес, имеющий вид передаточной функции. Взвешенный сигнальный граф САР напряжения сварочной дуги приведен на Рисунке 4.
Порядок построения структурной схемы линейной математической модели аналогичен порядку построения исходного сигнального графа. Сначала слева направо располагают основную цепочку связей переменных от сигнала задания к управляемой величине. Затем внизу справа налево строят цепочку главной обратной связи. После этого в произвольном порядке достраивают остальные связи математической модели.
Структурная схема САР напряжения сварочной дуги приведена на Рисунке 5.
Похожие работы
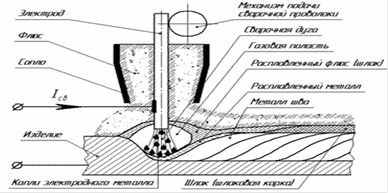
... серийном и массовом производстве для выполнения длинных прямолинейных и кольцевых швов на металле толщиной от 2 до 100 мм. Под флюсом сваривают углеродистые и легированные стали, медь, алюминий и их сплавы. Автоматическая сварка широко применяется в котло-строении, судостроении, производстве сварных труб и других отраслях машиностроения и строительства. Она является одним из основных звеньев ряда ...
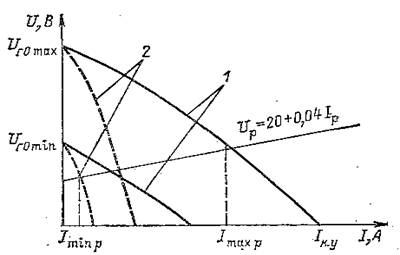
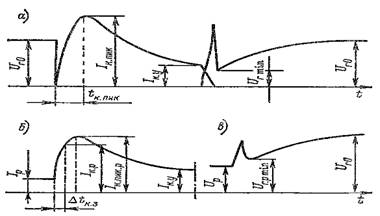
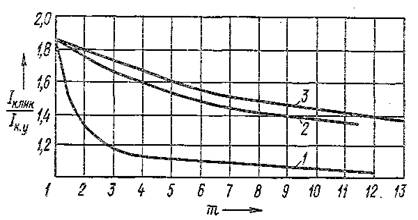
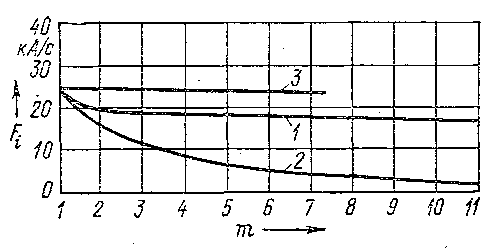
... тока короткого замыкания генератора ГСО-300 А от изменения параметров цепей якоря и возбуждения в диапазоне малых токов (U = 43 В; I = 225 А) Зависимость перечисленных показателей качества переходных процессов сварочных генераторов от основных параметров может быть иллюстрирована расчетными кривыми, показанными на Рис.4 и 5 для отечественного сварочного генератора ГСО - 300А. Из кривых на ...

... 2.1 Разработка и обоснование алгоритма функционирования и структурной схемы проектируемого устройства На основе проведенного исследования методов и устройств компенсации реактивной мощности в системах электроснабжения преобразовательных установок поставим задачу проектирования. Необходимо синтезировать устройство компенсации реактивной мощности для систем электроснабжения преобразовательных ...
... или двигателя. · Местное управление – это управление приводом выключателя, разъединителя и другой аппаратуры непосредственно на месте. · Автоматическое управление – его используют в системе электроснабжения предприятий с большой потребляемой мощностью. Автоматическое управление осуществляется с помощью вычислительных машин управления ВМУ. Информация, поступающая в ВМУ, обрабатывается и ...
0 комментариев