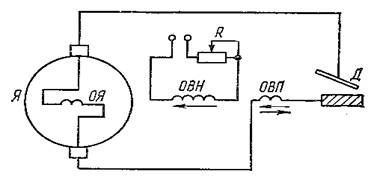
Функциональная схема САР напряжения сварочной дуги
Система дифференциальных уравнений
Взвешенный сигнальный граф и структурная схема линейной математической модели САР
Определение передаточных функций САР напряжения сварочной дуги
Определение сквозной передаточной функции САР по взвешенному сигнальному графу с помощью преобразования структурных схем (см.Рисунки12-19)
Навигация
Система дифференциальных уравнений
Система автоматического регулирования напряжения сварочной дуги
39824
знака
0
таблиц
18
изображений
4. Система дифференциальных уравнений
Структура системы дифференциальных уравнений САР полностью определяется ее сигнальным графом. Под структурой системы дифференциальных уравнений будем понимать, во-первых, множество функций времени, задаваемых извне, во-вторых, множество искомых функций времени, относительно которых составляется система дифференциальных уравнений и, в-третьих, список дифференциальных уравнений с указанием для каждого уравнения, какие функции времени являются для него заданными, а какая функция – искомой.
Множество сигналов, задаваемых извне, полностью определяется множеством внешних вершин сигнального графа, а множество искомых сигналов - множеством внутренних вершин. Каждой внутренней вершине соответствует одно уравнение, причем сигнал, соответствующий этой вершине является для данного уравнения искомым. Ребра, входящие в данную вершину, указывают, какие сигналы являются заданными для данного уравнения. Таким образом, общее число уравнений равно общему числу внутренних вершин сигнального графа.
Уравнение, соответствующее некоторой вершине сигнального графа, должно определять значение или закон изменения физической величины, символически обозначаемой этой вершиной, если заданы значения или законы изменения во времени физических величин, соответствующих вершинам, из которых исходят ребра, ведущие в данную вершину. При составлении каждого уравнения необходимо отдавать себе отчет, насколько это уравнение идеализирует реальную связь данных переменных. Если мгновенное значение переменных, соответствующих исходным вершинам, полностью определяет мгновенное значение данной переменной, то уравнение имеет вид обычной функции, например,
![]()
Если же описываемая связь не является мгновенной, то уравнение будет дифференциальным, т. е. связывающим не только мгновенные значения сигналов, но и мгновенные значения их производных в каждый момент времени t:

Составить уравнение данной связи - это значит полностью определить вид функции f(…) либо f1(…) и f2(…), если уравнение дифференциальное. В исходной системе уравнений эти функции могут быть заданы любым способом: выражены в виде формул через элементарные функции или заданы в виде графиков. При этом преимущество следует отдавать аналитическому представлению функций, входящих в уравнения.
Таким образом, для САР напряжения сварочной дуги, сигнальный граф которой приведен на Рисунке 3, система дифференциальных уравнений имеет вид (для простоты записи аргумент t переменных величин будем опускать):
1) Напряжение U1 пропорционально произведению задающего напряжения Uз и перемещения ручки потенциометра:
![]()
где К1 – коэффициент пропорциональности.
![]()
2) Ток I1 в обмотке возбуждения генератора определяется величиной напряжения U1. В силу того, что обмотка возбуждения обладает значительной индуктивностью, эта связь имеет инерционный характер и описывается дифференциальным уравнением
![]()
где К2 – индуктивность обмотки возбуждения;
К3 – ее активное сопротивление.
![]() ,
, ![]()
3) Поток возбуждения генератора Ф1 зависит только от мгновенного значения тока возбуждения I1. Эта связь трудно выражается аналитически. Представим ее кривой намагничивания стали в статоре генератора:

4) Суммарный магнитный поток Ф, зависит от значений магнитных потоков Ф1 и Ф2 :
Ф= Ф1 + Ф2
5) Напряжение Uя, возникающее на щетках якоря генератора, зависит как от магнитного потока возбуждения генератора Ф, так и от скорости принудительного вращения якоря Wг. Согласно известным законам физики напряжение Uя пропорционально каждой из переменных Ф и Wг., т.е. пропорционально их произведению:
![]()
где К4 - электрическая постоянная якоря генератора.
6) Ток Iдв, протекающий по обмотке якоря двигателя, определяется разностью напряжения на щетках якоря Uя и противо-ЭДС Е, вырабатываемой вращающимся якорем.
Эта связь является инерционной в силу того, что якорь имеет значительную индуктивность, и описывается дифференциальным уравнением
![]()
где К5 - индуктивность обмотки якоря, К6 - ее активное сопротивление.
![]() ,
, ![]()
7) Вращающийся момент на валу двигателя Мдв определяется мгновенными значениями тока Iдв, протекающего по виткам якорной обмотки, и магнитного потока, возбуждения Фв, пересекающего витки якоря. Величина момента Мдв пропорциональна каждой из переменных Iдв и Фв:
![]()
где К7 - моментная постоянная якоря двигателя.
![]()
8) Угловое ускорение вала двигателя есть производная от угловой скорости его вращения Wдв. В свою очередь, угловое ускорение вала согласно закону Ньютона пропорционально действующему на него суммарному вращающему моменту, который равен разности вращающего момента Мдв и момента сопротивления нагрузки Мс, приведенного к валу двигателя:
![]()
где К8 - суммарный момент инерции якоря, редуктора и нагрузки, приведенный к валу двигателя.

9) Якорь двигателя, вращающийся со скоростью Wдв в магнитном потоке возбуждения Фв, фактически представляет собой генератор, вырабатывающий противо-ЭДС Е. Поэтому вид уравнения, связывающего Е с Wдв и Фв, такой же как и в п.5:
![]()
где К9 - электрическая постоянная.
![]()
10) Связь потока возбуждения двигателя Фв с током возбуждения Iв выразим аналогично п. 3 в виде кривой намагничивания стали в статоре двигателя:

11) Уравнение связи тока возбуждения двигателя Iв с напряжением возбуждения Uв аналогично уравнению в п.2 для тока возбуждения генератора:
![]()
где К10 и К11 - соответственно индуктивность и активное сопротивление обмотки возбуждения двигателя.
![]() ,
, ![]()
12) Скорость подачи электрода Vп пропорциональна скорости двигателя Wдв
![]()
где К12- коэффициент передачи редуктора.
![]()
13) Зависимость сопротивления сварочной дуги Rд и тока сварочной дуги Iд от напряжения трансформатора Uт
![]()
где К13, К14- коэффициенты пропорциональности
![]()
![]()
14) Скорость сжигания подложки Vс пропорциональна току сварочной дуги Iд
![]()
где К15- коэффициент пропорциональности
![]()
15) Величина зазора между электродом и подложкой L пропорциональна суммарной скорости, которая равна сумме скорости подачи электрода Vп и скорости сгорания подложки Vс
![]()
где К16- коэффициент пропорциональности
![]()
16) Сопротивление сварочной дуги Rд пропорционально зазору между электродом и подложкой L
![]()
где К17- коэффициент пропорциональности
![]()
17) Напряжение сварочной дуги Uд зависит от тока сварочной дуги Iд, а также от сопротивления сварочной дуги Rд . Напряжение сварочной дуги Uд пропорционально каждой из переменных Iд и Rд ,т.е. пропорционально их произведению:
![]()
где К18- коэффициент пропорциональности
![]()
18) Напряжение снимаемое с диагонали диодного моста пропорционально Uд.м напряжению сварочной дуги Uд
![]()
где К19- коэффициент пропорциональности
![]()
19) Уравнение связи тока возбуждения генератора I2 с напряжением возбуждения Uд.м аналогично уравнению в п.2 для тока возбуждения генератора:
![]()
где К10 и К11 - соответственно индуктивность и активное сопротивление обмотки возбуждения генератора.
![]() ,
, ![]()
20) Связь потока возбуждения генератора Ф2 с током возбуждения I2 выразим аналогично п. 3 в виде кривой намагничивания стали в статоре генератора:

21) Напряжение на выходе трансформатора Uт пропорционально напряжению сети Uс
![]()
где К22- коэффициент трансформации
![]()
22) Напряжение в потенциометре URпропорционально напряжению диодного моста Uд.м
![]()
где К23- коэффициент пропорциональности
![]()
Дифференциальные уравнения могут быть как линейные, так и нелинейными. Нелинейные дифференциальные уравнения вносят значительные затруднения в решение реальных задач, особенно в тех случаях, когда они имеют высокий порядок. Поэтому очень часто стараются заменить в первом приближении нелинейное дифференциальное уравнение линейным, анализ которого выполняется значительно проще. Методика выполнения такой замены называется линеаризацией.
Линеаризация системы дифференциальных уравнений САУ основана на двух предложениях.
1. Предполагается, что при номинальной работе системы отклонения внешних воздействий от их постоянных номинальных значений малы, а следовательно, малы и отклонения всех переменных в системе.
Однако, необходимо отметить, что это предположение выполняется далеко не всегда.
2. Все функции от переменных, входящих в данное уравнение, не имеют разрывов и являются гладкими при номинальных значениях аргументов. Другими словами, предполагается, что для каждой функции существуют первые производные по всем аргументам в точке, соответствующей номинальному режиму. В противоположном случае, если хотя бы одна из функций, входящих в уравнения, имеет разрыв в точке номинального режима, либо не является гладкой в этой точке, то такое уравнение, а также сама функция называются существенно нелинейными. Линеаризация таких уравнений и функции невозможна.
Номинальные значения переменных обозначаются большими буквам с верхним нулевым индексом:
X(t)= X0= const, U(t)= U0= const и т.д
Отклонения переменных обозначаются соответствующими маленькими буквами:
x(t)=X(t) – X0 и т.д
Очевидно, что в номинальном режиме отклонения всех переменных в системе, а также производные отклонений по времени равны нулю.
Дифференциальное уравнение является линейным, если функция f1(…) и f2(…) в левой и правой частях являются линейными комбинациями переменных и их производных:

В частном случае, если функции f1(...) и f2(...) не содержат в качестве аргументов производных искомой функции и заданных функций, дифференциальное уравнение (1) превращается в обычную функцию определяющую зависимость переменной X(t) в какой-либо момент от мгновенных значений аргументов Y(t), ..., Z(t) в тот же момент:
![]() (3)
(3)
Такой вид математической модели означает, что моделируемый объект рассматривается как статический (безинерционный). САР напряжение сварочной дуги-это статическая система, так как всегда будет присутствовать ошибка регулируемого параметра, в силу нелинейной зависимости числа оборотов двигателя от величины магнитного потока возбуждающей компенсирующей обмотке 2.
Аналитическая запись линейной функции содержит только суммы аргументов, умноженных, быть может, на постоянные коэффициенты
![]()
Если функция имеет только один аргумент, то она может быть задана в виде графика. График линейной функции имеет вид прямой линии, проходящей через начало координат:

Заметим, что если график, имеющий вид прямой линии, не проходит через начало координат, то соответствующая ему функция не является линейной. Вернемся к системе уравнений САР напряжение сварочной дуги. Очевидно, что в этой системе линейными являются уравнения в пп. 2,4,6,8,11,12,14,15,16,18,19,20,21,22. К нелинейным относятся уравнения в пп. 1,3,5,7,9,10,13,17.
В общем случае линеаризация заключается в разложении функции в ряд Тейлора в окрестности номинальных значений аргументов и отбрасывании членов ряда, порядок которого выше первого.
При проведении линеаризации конкретной функции необходимо внимательно относится к номинальным значениям переменных, отмечая те из них, которые равны нулю в установившемся режиме работы данной САР. Если номинальные значения некоторых переменных равны нулю, то могут обратиться в нуль коэффициенты при отдельных аргументах в выражении линеаризованной функции. Такие аргументы необходимо отбросить.
Для тех дифференциальных уравнений и функций исходной модели САР, которые являются линейными, переход к отклонениям сводится к замене обозначений полных переменных на обозначения их отклонений.
Итак, линеаризованная система уравнений имеет вид:
1) Для линеаризации зависимости напряжения подаваемого на компенсационную обмотку генератора U1 от задающего напряжения Uз и перемещения ручки потенциометра Х, необходимо найти частные производные U1 по переменным Uз и Х в точках номинальрого режима
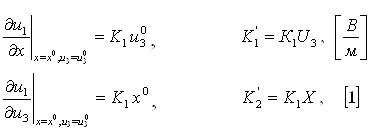
Линеаризированная зависимость примет вид:
![]()
2) 
3) Зависимость магнитного потока возбуждения Ф1 генератора от величины тока возбуждения I1 задана графически. Отметив на графике точку номинального режима и проведя касательную к графику в этой точке, получим линеаризованную зависимость магнитного потока от тока в отклонениях.
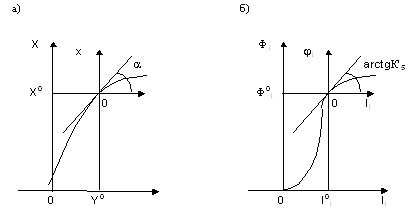
Тангенс угла наклона к оси i1 обозначим К5. Линеаризованная зависимость примет вид

4) ![]()
5) Для линеаризации зависимости напряжения на щетках якоря генератора Uя от величины магнитного потока возбуждения Фи скорости привода генератора Wг необходимо найти частные производные Uя. по переменным Ф и Wг в точке номинального режима:
![]()
Линеаризованная зависимость:

6) 
7) Линеаризация зависимости вращающего момента на валу двигателя Мдв от тока якоря Iдв и величина потока возбуждения Фв, аналогична линеаризации уравнения п. 1, 5. Линеаризованная зависимость:
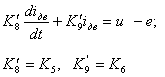
8) 
9) Линеаризация зависимости скорости вращения якоря двигателя Wдв в магнитном потоке возбуждения Фв от противо-ЭДС Е проводится аналогично пп.1,5,7:

10) Линеаризация графически заданной величины магнитного потока возбуждения двигателя Фвд от тока возбуждения проводится аналогично пп. 3

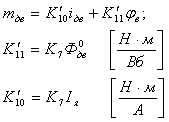
11) Линеаризация уравнение связи тока возбуждения двигателя Iв с напряжением возбуждения Uв
12) Линеаризация скорость подачи электрода Vп от скорости двигателя Wдв

13) Линеаризация зависимость сопротивления сварочной дуги Rд и тока сварочной дуги Iд от напряжения трансформатора Uт аналогична п.1,5,7,9.
Пусть ![]() ,тогда исходное дифференциальное уравнение примет вид:
,тогда исходное дифференциальное уравнение примет вид:

Линеаризованная зависимость примет вид:

14) ![]()
15) Линеаризованная зависимость величины зазора между электродом и подложкой L от суммарной скорости подачи электрода Vп и скорости сгорания подложки Vс
![]()
16) ![]()
17) Линеаризация напряжение сварочной дуги Uд от тока сварочной дуги Iд, а также от сопротивления сварочной дуги Rд аналогично пп. 1,5,7,9,13:

18) ![]()
19) Линеаризация уравнения связи тока возбуждения генератора I2 с напряжением потенциометра URаналогично уравнению в п.2 для тока возбуждения генератора:

20) Линеаризация графически заданной величины магнитного потока возбуждения двигателя Ф2 от тока возбуждения проводится аналогично п. 3, 10:
![]()
21) ![]()
22) ![]()
Похожие работы
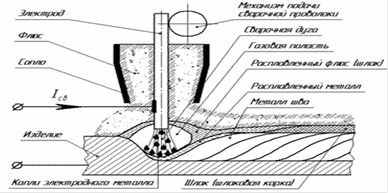
... серийном и массовом производстве для выполнения длинных прямолинейных и кольцевых швов на металле толщиной от 2 до 100 мм. Под флюсом сваривают углеродистые и легированные стали, медь, алюминий и их сплавы. Автоматическая сварка широко применяется в котло-строении, судостроении, производстве сварных труб и других отраслях машиностроения и строительства. Она является одним из основных звеньев ряда ...
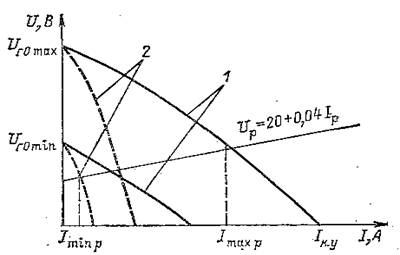
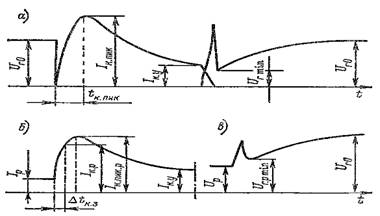
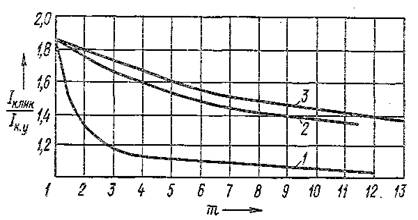
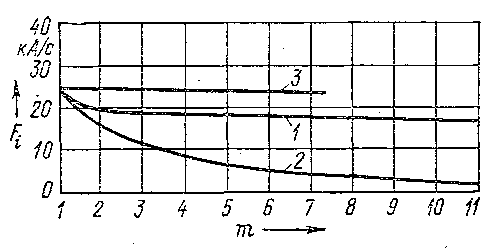
... тока короткого замыкания генератора ГСО-300 А от изменения параметров цепей якоря и возбуждения в диапазоне малых токов (U = 43 В; I = 225 А) Зависимость перечисленных показателей качества переходных процессов сварочных генераторов от основных параметров может быть иллюстрирована расчетными кривыми, показанными на Рис.4 и 5 для отечественного сварочного генератора ГСО - 300А. Из кривых на ...

... 2.1 Разработка и обоснование алгоритма функционирования и структурной схемы проектируемого устройства На основе проведенного исследования методов и устройств компенсации реактивной мощности в системах электроснабжения преобразовательных установок поставим задачу проектирования. Необходимо синтезировать устройство компенсации реактивной мощности для систем электроснабжения преобразовательных ...
... или двигателя. · Местное управление – это управление приводом выключателя, разъединителя и другой аппаратуры непосредственно на месте. · Автоматическое управление – его используют в системе электроснабжения предприятий с большой потребляемой мощностью. Автоматическое управление осуществляется с помощью вычислительных машин управления ВМУ. Информация, поступающая в ВМУ, обрабатывается и ...
0 комментариев