Навигация
Оценка быстродействия устройства
19382
знака
0
таблиц
7
изображений
7. Оценка быстродействия устройства
Быстродействие фильтра в рабочем режиме оценим как время, необходимое для обработки каждого прерывания процессора. Рабочая программа фильтра линейная (не содержит разветвлений), поэтому общее число машинных тактов, требуемых для выполнения программы, получим как сумму машинных тактов всех последовательно выполняемых команд, составляющих рабочий цикл процессора.
Сумма машинных тактов для рабочего цикла приведенной выше программы равна 549. Из этого следует вывод, что процессор не успеет выполнить подпрограмму обслуживания прерывания за интервал дискретизации TД. При частоте FCLK МП = 1,5 МГц FД = 2.0 кГц (750 машинных тактов процессора). Поэтому тактовая частота процессора должна быть увеличена. Примем FCLK МП = 3 МГц, что для заданной БИС МП допустимо, но при этом следует вернуться к вопросам формирования тактовых импульсов для АЦП и входных импульсов таймера.
Повышение тактовой частоты МП может быть также необходимым, если ставить задачу увеличения динамического диапазона представления данных для входного сигнала. При однобайтной обработке данных вследствие масштабирования шумы квантования увеличиваются в kМ раз. Их уменьшения можно добиться переходом к двухбайтному представлению данных при хранении и обработке, что приведет, естественно, к увеличению длины программы и числа машинных тактов для ее реализации.
Уточнение аппаратной части фильтра
Принятые ранее решения по аппаратной части и программе изменятся в минимальной степени, если при FCLK МП = 3 МГц тактовые импульсы для АЦП и таймера с частотой FCLK АЦП= FCLK Т = 1,5 МГц получить путем деления в два раза в счетном триггере. Для этого можно применить ИС КМОП К564ТВ1 (сдвоенный JK-триггер с динамическим тактовым входом и асинхронными RS-входами).
8. Расчёт АЧХ фильтра
Разностное уравнение проектируемого фильтра в общем виде можно представить следующим образом:
yn = b 20X n + b 21X n – 1 + b 22X n – 2 – a 21 y n – 1 – a 22 y n – 2.
Коэффициенты b1i , a1i , b2i , a2i определяют характеристики фильтра.
При значениях коэффициентов
b 20 = 0.958;b 21 = 1;b 22 = 0; a 21 = 0;a 22 = 0.958
фильтр имеет АЧХ фазового звена.
В z-плоскости свойства цифрового фильтра описывает передаточная функция H(z), которая при двухкаскадной структуре и для приведенного выше разностного уравнения имеет вид:
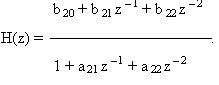
При z = e jwT = e j2pfT, где Т = ТД, сигнал на входе фильтра – синусоида с частотой f и с единичной амплитудой, а функция H(e j2pfT) равна частотной характеристике фильтра, из которой можно получить АЧХ и ФЧХ.
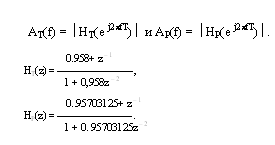
Значения коэффициентов разностного уравнения определяют форму и параметры частотных характеристик, поэтому для выявления влияния их приближенного представления следует рассчитать АЧХ при заданных (точных) и реальных (приближенных) значениях коэффициентов:
9. Заключение
В данной курсовой работе была построена схема цифрового устройства и разработана программа, обеспечивающая работу данного устройства как цифрового фазового звена. Устройство имеет высокое быстродействие и в полной мере удовлетворяет требованиям технического задания. Необходимость в высоком быстродействии связана со стремлением обрабатывать в реальном масштабе времени широкополосные сигналы.
10. Список использованных источников
1. Щелкунов Н.Н., Дианов А.П. Микропроцессорные средства и системы. М.: Радио и связь, 1989.
2. Балашов Е.П., Григорьев В.Л., Петров Г.А. Микро- и мини-ЭВМ: Учеб. пособие для вузов. М.: Энергоатомиздат, 1984.
3. Угрюмов Е.П. Цифровая схемотехника. СПб.: БХВ-Петербург, 2001.
4. Рафикузаман М. Микропроцессоры и машинное проектирование микропроцессорных систем: В 2-х кн. Кн.1 и 2 /Пер. с англ. М.: Мир, 1988.
5. Микропроцессорный комплект К1810: Структура, программи-рование, применение: Справочная книга / Ю.М.Казаринов, В.Н.Номоконов, Г.С.Подклетнов, Ф.В.Филиппов; Под. ред. Ю.М.Казаринова. М.:Высш. шк., 1990.
6. Григорьев В.Л. Программное обеспечение микропроцессорных систем. М.: Энергоатомиздат, 1983.
7.Солонина А.И., Улахович Д.А., ЯковлевЛ.Н. Алгоритмы и процессоры цифровой обработки сигналов. СПб.: БХВ-Петербург, 2001.
8. Соколов Ю.П. Микроконтроллеры семейства MCS-51: архитектура. программирование, отладка: Учеб. пособие. Рязан. гос. радиотехн. акад. Рязань, 2002.
9. Интегральные микросхемы: Микросхемы для аналого-цифрового преобразования и средств мультимедиа. Выпуск 1. М.: ДОДЭКА, 1996.
10. Федорков Б.Г., Телец В.А. Микросхемы ЦАП и АЦП: функ-ционирование, параметры, применение. М.: Энергоатомиздат, 1990.
Похожие работы

... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...





... совпадает с результатом ручного просчёта. Таким образом в процессе выполнения программы переполнения не происходит. 6. Составление и описание электрической принципиальной схемы устройства Электрическая принципиальная схема цифрового фазового корректора содержит следующие микросхемы: DD1 – МП К1821ВМ85 DD2 – ПЗУ КР1821РФ55 DD3 – ОЗУ КР1821РУ55 DA1 – ЦАП К572ПА1 DA2 – ОУ К154УД3 DA3 – ОУ ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
0 комментариев