Навигация
Проектирование цифрового фазового звена
19382
знака
0
таблиц
7
изображений
Содержание
1. Введение
2. Анализ задачи и ее формализация
3. Разработка и обоснование общего алгоритма функционирования устройства и его описание
4. Синтез операционного узла (выбор и обоснование аппаратной части устройства)
5. Синтез управляющего узла (разработка программы на языке микропроцессора)
6. Составление принципиальной схемы устройства и ее описание
7. Оценка быстродействия устройства
8. Порядок расчета АЧХ фильтра
9. Заключение
10. Список использованных источников
1. Введение
В радиотехнике, наряду с методами аналоговой обработки сигналов, широкое распространение получили методы и устройства цифровой обработки сигналов, реализованные на основе микропроцессоров (МП). Применение МП в радиотехнических системах (РТС) существенно улучшает их технико-экономические показатели (потребление энергии, габариты, стоимость и т.д.), открывает широкие возможности реализации сложных алгоритмов цифровой обработки сигналов (ЦОС).
Применение МП целесообразно в тех случаях, когда реализация определенных функций РТС с использованием "жесткой логики" требует большого количества микросхем (более 30).
Микропроцессоры находят применение при решении широкого круга радиотехнических задач, таких как построение радиотехнических измерителей координат, сглаживающих и экстраполирующих фильтров устройств вторичной обработки сигналов, специализированных вычислительных устройств бортовых навигационных комплексов, устройств кодирования и декодирования сигналов, весовой обработки пачечных сигналов в радиолокации, различного рода измерительных устройств и т.п.
При создании радиоэлектронной аппаратуры используются три основных подхода реализации цифровых устройств: аппаратный, программный и аппаратно- программный. При аппаратном получают цифровые устройства с традиционной "жесткой'' логикой, что обеспечивает наибольшее быстродействие устройств, но требует трудоемкой разработки индивидуальной структуры цифрового устройства – спецпроцессора. При программном подходе цифровое устройство реализуется в виде программы для готовой универсальной ЭВМ, в качестве которой можно использовать микроЭВМ, предназначенную для встраивания непосредственно в разрабатываемые блоки. Аппаратно-программный подход предполагает разработку как программных, так и аппаратных средств. К ним относятся цифровые устройства, реализованные как автоматы с микропрограммным управлением и хранимой в ПЗУ программой, а также цифровые устройства, построенные на основе микропроцессора. Аппаратно-программный подход при использовании современных интегральных схем позволяет в наибольшей степени учесть особенности решаемых задач.
Выбор варианта построения цифрового устройства в каждом конкретном случае осуществляется с учетом всех требований технического задания. Применение "жесткой" логики оправдано в двух основных случаях I) при необходимости получения предельно бысокого быстродействия; 2) при построении относительно несложных устройств на интегральных схемах малой и средней степени интеграции.
Если же от устройства требуется гибкость, т.е. способность изменения функций программным путем в процессе работы или расширения круга решаемых задач, тогда становится целесообразным использование микропроцессоров (МП), Применение оправдано при построении устройств большой сложности, если быстродействие МП оказывается достаточным. Ограничения, связанные с недостаточным быстродействием МП, можно преодолеть построением многопроцессорных устройств или выполнением части функций с помощью специально разработанных аппаратных средств, работающих совместно с МП.
Наибольшая экономичность цифрового устройства по объему оборудования и другим эксплуатационным параметрам, а также наименьшая трудоемкость проектирования достигаются при использовании однокристальных МП.
2. Анализ задачи и её формализация
Минимальная конфигурация МП-системы на основе набора К1821, характеристики АЦП (572ПВ3) и технические требования по обеспечению их работы определяют функциональную схему фильтра, приведенную на рис.1.
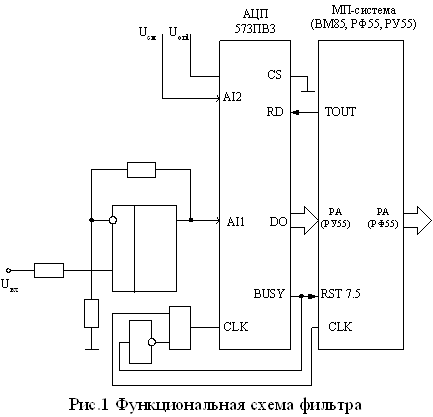
Входное напряжение UВХ через согласующий усилитель подается на вход AI1 АЦП. Согласующий усилитель включен с целью увеличения размаха входного напряжения до требуемого для работы АЦП. Сдвиг входного напряжения в рабочую область АЦП осуществляет напряжение UCМ, поступающее на вход AI2. Опорное напряжение UОП1 требуется для работы АЦП, входящего в состав БИС 572ПВ3.
Коэффициент усиления усилителя: КСОГЛ = DUАЦП/DUВХ = 2,5.
Напряжение смещения: UСМ = DUАЦП/2 = +5 В.
Опорное напряжение: UОП1 = - 10 В.
Сброс и запуск АЦП осуществляется по входу /RD (при постоянном значении /CS = 0) импульсом низкого уровня с выхода TOUT таймера, настроенного на формирование импульсов с частотой дискретизации FД=2.0 кГц.
Тактирование регистра последовательных приближений АЦП осуществляется тактовыми импульсами CLK МП-системы, поступающими через логическую схему И на тактовый вход СLK АЦП. Высокий уровень сигнала /BUSY, устанавливающийся при окончании преобразования, прекращает поступление импульсов CLK на тактовый вход АЦП.
Тактовая частота преобразования АЦП не должна превышать 1,5 МГц, поэтому примем FCLK АЦП = FCLK МП = 1,5 МГц.
Время преобразования текущего отсчета входного напряжения в код составляет 8 периодов тактовой частоты: tПР = 8TCLK АЦП = 5,3 мкс.
Схема выборки и хранения (СВХ) необходима, если за время tПР = 5,3 мкс самый быстроизменяющийся сигнал (синусоида с частотой
fВ = 0,5FД и с максимальной амплитудой) изменяется на относительную величину, превышающую половину шага квантования h:
0,5h = 0,5/28 = 0,00195. Максимальное изменение синусоиды на интервале tПР равно Dx = sin 2pfВtПР =0,033. Dx > 0,5h, поэтому СВХ для хранения текущего отсчета сигнала на время преобразования АЦП требуется.
Частота дискретизации FД = 2,0 кГц формируется аппаратным таймером РУ55, в котором частота переполнения FП в режиме 3 равна FД При использовании в качестве входных импульсов таймера тактовых импульсов CLK МП-системы (FCLK МП = 1,5 МГц) исходное состояние таймера равно NТАЙМЕРА = FCLK МП/FД = 750(10) = 00 0010 1110 1110 (2) .При дополнении 14-разрядного двоичного кода NТАЙМЕРА двумя битами 11, задающими режим 3, получаем байты NСТ = 1100 0010(2) = C2(16), NМЛ = 1110 1110 (2) = EE(16), которые загружаются в таймер при инициализации фильтра.
Согласование кода АЦП и МП необходимо, так как числовые значения на выходе АЦП не отображают значения знакопеременного входного сигнала вследствие подачи на вход AI2 напряжения смещения UСМ. Согласование можно выполнить смещением диапазона изменения чисел на выходе АЦП в отрицательную область путем вычитания из каждого значения выходного кода константы 1000 0000(2) - половины от максимального значения выходного кода АЦП (прибавление дает тот же результат).
Форма представления чисел (числовых значений отсчетов входного сигнала) – правильная дробь с фиксированной запятой: старший разряд – знаковый, запятая, остальные двоичные разряды – числовые. Таким образом, числовые значения входного сигнала изменяются в диапазоне от – 1 до + 1.
Ввод данных в МП осуществлять по сигналу готовности АЦП, используя для этого прерывание МП оповещающим сигналом /BUSY. Выберем аппаратное прерывание динамического типа - RST 7.5, которое разрешается при установке маски прерывания командой SIM. Для ввода данных определим порт РА (РУ55) в режиме простого ввода без квитирования.
Необходимость хранения данных вытекает из вида заданного разностного уравнения.
В данной программе хранение данных в текущем цикле обработке входного сигнала (в текущем интервале дискретизации) не требуется.
Переполнение разрядной сетки имеет место, если при вычислении разностного уравнения получен числовой результат, выходящий за пределы - 1, + 1 при принятом 8-разрядном формате представления данных. Для исключения переполнения разрядной сетки введем масштабирование (ослабление) входных отсчетов путем их умножения на коэффициент масштабирования kМ < 1, при котором вычисление разностного уравнения никогда не дает недопустимого результата.
Коэффициент kМ получим, предположив, что отсчеты в разностном уравнении принимают максимальные значения (- 1, + 1) и такие знаки, при которых слагаемые разностного уравнения складываются по модулю, то есть складываются по модулю коэффициенты.
Подставив xn в уравнение для вычисления yn и просуммировав по модулю коэффициенты, получим yn мах = 0.958+1+0.958=1.916, что является недопустимым результатом. Отсюда заданный коэффициент масштабирования
kМ = 1/ yn мах = 0,522.
Реальные значения коэффициентов разностного уравнения и коэффициента kМ отличаются от заданных вследствие ограничения длины разрядной сетки:
b20 = 0,958(10) » 0,11110101(2) = 0.95703125 (10);
b21 = 1(10) » 1(2) = 1 (10);
a22 = 0,958(10) » 0,11110101(2) = 0.95703125 (10);
kМ = 0,522 (10) » 0,10000101(2) = 0.51953125 (10).
По этой причине форма и параметры реальных частотных характеристик фильтра (АЧХ, ФЧХ) отличаются от расчетных. Могут также нарушаться условия устойчивости фильтра.
Алгоритм умножения на коэффициент (на константу без знака) целесообразно реализовать программным способом на основе алгоритма умножения вручную: арифметические сдвиги множимого вправо, соответствующие позициям единиц множителя, и накопление суммы частичных произведений. Разряды множимого, выходящие в результате сдвига за границу разрядной сетки, теряются.
Исходное состояние аппаратной части и программы фильтра устанавливается при включении питания по сигналу аппаратного узла сброса (схемы сброса). При этом:
· программный счетчик (ВМ85) принимает нулевое значение;
· сбрасывается флаг разрешения прерываний (ВМ85);
· все линии портов РА и РВ (РФ55) настраиваются на ввод;
· порты РА, РВ, РС (РУ55) настраиваются на ввод в режиме простого обмена данными;
· таймер (РУ55) останавливается;
· содержимое ячеек ОЗУ и буферных регистров портов (РУ55) сохраняется.
Из этого следует, что переходу фильтра в рабочий режим должна предшествовать его настройка (инициализация) на обеспечение принятого принципа функционирования, выбранных режимов работы узлов, заданных рабочих характеристик.
Похожие работы

... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...





... совпадает с результатом ручного просчёта. Таким образом в процессе выполнения программы переполнения не происходит. 6. Составление и описание электрической принципиальной схемы устройства Электрическая принципиальная схема цифрового фазового корректора содержит следующие микросхемы: DD1 – МП К1821ВМ85 DD2 – ПЗУ КР1821РФ55 DD3 – ОЗУ КР1821РУ55 DA1 – ЦАП К572ПА1 DA2 – ОУ К154УД3 DA3 – ОУ ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
0 комментариев