Электронные карты
Геодезическая основа отсчета координат ЭК
Разграфка электронных карт
Формат для обмена картографической информацией
Корректура электронных карт
Основные принципы построения АКС
Обеспечение АКС
Информационно-программное обеспечение НИКС
Другие базы данных
Справочная система НИКС
О НИКС как о центре судовой информационной сети
Планирование пути
Контроль прохождения маршрута
Регистрация информации
Управление движением судна
Анализ информации основных внешних навигационных датчиков НИКС
Анализ информации СНС
Краткая характеристика системы «ГЛОНАСС»
Автоматические идентификационно-информационные системы
Функции АИС, предоставляемые сведения, частота обновления данных
Ограничения АИС
Погрешности, обусловленные ошибками датчиков информации
Данные ЭК и их структура
Предварительная прокладка
IEC Protocol 61162-1 "Digital Interfaces - .Navigation and Radiocommunication Equipment On Board Ship"
Навигация
Анализ информации СНС
Электронные системы отображения навигационных карт
223834
знака
6
таблиц
7
изображений
4.3 Анализ информации СНС.
4.3.1 Преимущества совместной работы НИКС со спутниковыми навигационными системами
НИКС должна иметь возможность непрерывного отображения места судна на основе обсерваций, точность которых соответствует требованиям безопасного плавания. Информацию для таких обсерваций предоставляют радионавигационные системы, береговые (РНС) или космические (СНС), а также РЛС. В 1989 г. Резолюцией А.666(16) ИМО приняла эксплуатационные требования к Всемирной радионавигационной системе (ВРНС), информация которой отвечает целям судовождения. В соответствии с этими требованиями ВРНС должна обеспечивать глобальность покрытия, непрерывность работы и выдачу координат с точностью, отвечающей стандартам точности судовождения. Система определений места или ее элементы должны быть одобрены ИМО.
Для морского судовождения обсервации могут считаться непрерывными, когда их частота составляет один раз в минуту и больше. Современные требования к точности судовождения определены резолюцией А. 815(19), принятой ИМО в 1995 г. Согласно этим требованиям в открытом море и в прибрежных водах место судна должно быть известно с 95%-погрешностью, не превышающей 4% расстояния до препятствия, но не большей 4 миль. Точность определения места при плавании в стесненных условиях должна быть не хуже 10 м.
К требуемой ИМО ВРНС наиболее близки по своим характеристикам среднеорбитальные спутниковые навигационные системы. В 1996 г. по заявкам правительств США и России ИМО одобрила системы GPS (Global Position System) и ГЛОНАСС (Глобальная навигационная спутниковая система), с объявленными точностями 100 м - у GPS и 45 м - у ГЛОНАСС. Приемоиндикаторы среднеорбитальных СНС включены в состав обязательной судовой навигационной аппаратуры, предусматриваемой главой 5 СОЛАС. С 2000 г. по решению Правительства США был отменен ввод погрешностей искусственного происхождения в данные GPS и ее точность повысилась до 35-45 м.
Системы GPS и ГЛОНАСС не соответствуют современным требованиям к точности определений места только при плавании в стесненных условиях. Одним из способов удовлетворения точности плавания в стесненных водах с помощью среднеорбитальных СНС является использование ими дифференциального режима определения - DGPS, который позволяет установить координаты объекта с точностью 1-5 м.
Приемоиндикаторы среднеорбитальных СНС и аппаратура отображения навигационных карт выгодно дополняют друг друга. Их совместное применение позволяет отображать положение судна в реальном масштабе времени, что имеет особенное значение при плавании в стесненных водах. При использовании бумажных карт требуется определенное время для переноса позиции судна с приемоиндикатора СНС на карту, что вызывает запаздывание в отображении текущей позиции. Кроме того, на бумажной карте нет возможности отображать положение судна непрерывно. При использовании систем отображения электронных карт на судне может быть установлен недорогой приемник СНС, так как дополнительные навигационные задачи в этом случае будут решаться НИКС.
При работе GPS в дифференциальном режиме в районе опорной станции НИКС оказывает значительную помощь судоводителю при плавании в стесненных водах, предоставляя в реальном времени точное положение судна на ЭК. Расширение сети опорных станций DGPS способствует значительному повышению роли НИКС в обеспечении безопасного судовождения.
4.3.2 Краткая характеристика GPS и ее погрешностей
Состав системы. Спутниковая навигационная система Министерства Обороны США GPS, называемая также NAVSTAR (Navigation System using Timing and Ranging), состоит из 24 навигационных искусственных спутников Земли (НИСЗ), наземного командно-измерительного комплекса и аппаратуры потребителей. Она является глобальной, всепогодной, навигационной системой, обеспечивающей определение координат объектов с высокой точностью в трехмерном околоземном пространстве.
Спутники GPS расположены на шести средневысоких орбитах (высота 20183 км) и имеют период обращения 12 часов. Плоскости орбит расположены через 60° и наклонены к экватору под углом 55˚. На каждой орбите располагается 4 спутника, три основных спутника и один запасной. 18 спутников - это минимальное количество для обеспечения видимости в каждой точке Земли не менее 4-х спутников.
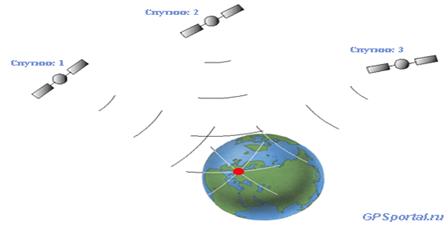
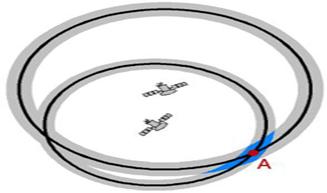
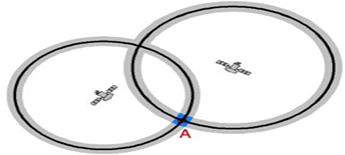
Система предназначена для обеспечения навигации воздушных и морских судов и определения времени с высокой точностью. Она может применяться в режиме двухмерной навигации - 2D (определение навигационных параметров объектов на поверхности Земли) и в трехмерном режиме - 3D (измерение навигационных параметров объектов над поверхностью Земли). Для нахождения положения объекта в трехмерном режиме требуется измерить навигационные параметры не менее 4-х НИСЗ, а при двухмерной навигации - не менее 3-х НИСЗ.
В системе используется псевдодальномерный метод определения положения и псевдорадиально-скоростной метод нахождения скорости объекта. Для повышения точности результаты определений сглаживаются с помощью фильтра Калмана.
Излучение навигационных сигналов спутниками GPS производится на двух частотах: Fl=1575,42 и F2=1227,60 МГц. Режим излучения -непрерывный с псевдошумовой модуляцией. Навигационные сигналы представляют собой защищенный Р-код (precision code), излучаемый на часотах Fl, F2, и общедоступный С/А-код (coarse and acquisition code), излучаемый только на частоте Fl.
В GPS для каждого спутника определен свой уникальный С/А-код и уникальный Р-код. Такой вид разделения сигналов спутников называется кодовым. Он позволяет в приемнике распознавать, какому спутнику принадлежит сигнал, когда несущая частота сигналов всех спутников одинакова.
GPS предоставляет два уровня обслуживания потребителей; точные определения (PPS - Precise Positioning Service) и стандартные определения (SPS - Standard Positioning Service). PPS основывается на точном Р-коде, а SPS - на общедоступном С/А-коде. Уровень обслуживания PPS предоставляется военным и федеральным службам США, а SPS - массовому гражданскому потребителю.
Кроме кодов Р и С/А спутник регулярно передает сообщение, которое содержит информацию о состоянии спутника, его эфемеридах, системном времени, прогнозе ионосферной задержки, показателях работоспособности.
Бортовая аппаратура GPS состоит из антенны и приемоиндикатора (ПИ). ПИ включает в себя приемник, вычислитель, блоки памяти, устройства управления и индикации. В блоках памяти хранятся необходимые данные, программы решения задач и Управления работой приемоиндикатора. В зависимости от назначения используется два вида бортовой аппаратуры: специальная и для массового потребителя.
Специальная аппаратура предназначена для определения кинематических параметров ракет, военных самолетов, кораблей и специальных судов. При нахождении параметров объектов в ней используются Р и С/А коды. Эта аппаратура обеспечивает практически непрерывные определения с точностью: местоположения объекта - 5-7 м, скорости - 0.05-0.15 м/с, времени - 5-15 нс.
Аппаратура для массового гражданского потребителя, в том числе и для морских судов, уступает по своим характеристикам специальной аппаратуре. Определение кинематических параметров объектов ведется в ней по наблюдениям находящихся в зоне видимости НИСЗ с использованием только С/А-кода. Эта аппаратура проще и дешевле специальной аппаратуры. Она способна обеспечивать точность определения местоположения порядка 35-45 м. Однако Министерство Обороны США с военной точки зрения посчитало предоставление такой точности всем без исключения потребителям потенциально опасным и искусственно снижала точность местоопределения до 100 м. Для этого в режиме SPS формировались ошибки искусственного происхождения (погрешности режима селективного доступа), вносимые в сигналы на борту спутников. С 2000 г. Правительством США ввод искусственных ошибок в данные GPS был отменен.
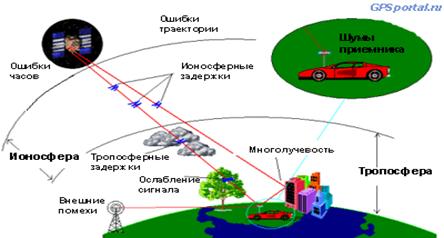
Погрешности и ограничения. Основными источниками погрешностей, влияющих на точность бортовой аппаратуры для массового потребителя, являются:
• Ионосферные погрешности, обусловленные задержками в распространении радиоволн в верхних слоях атмосферы, которые приводят к ошибкам определения положения порядка 20-30 м днем и 3-6 м ночью.
• Тропосферные погрешности, причиной которых являются искажения в прохождении радиоволн через нижние слои атмосферы. Они не превышают 30 м.
• Эфемеридная погрешность, обусловленная разностью между расчетным и действительным положениями спутника, которая составляет не более 3 м.
• Погрешность определения расстояния до спутника, обычно не превышающая 10 м.
Средняя квадратическая величина погрешности режима селективного доступа (ошибки искусственного происхождения, вносимой до 2000 г. с целью загрубления навигационных измерений) составляла примерно 30 м.
Следует также обратить внимание и на периодическое возникновение в системе зон PDOP (Position Dilution of Precision), в которых не обеспечивается объявленная точность навигации. Эти зоны возникают в течении 5-15 мин в диапазоне 30-50° северной и южной широт.
Дифференциальный метод определений. Основным способом повышения точности местоопределений GPS в режиме SPS является применение принципа дифференциальных навигационных измерений. Дифференциальный способ (DGPS) реализуется с помощью опорной станции с известными координатами, устанавливаемой в районе определений места. На станции располагается контрольный GPS-приемник. Сравнивая свои известные координаты с измеренными, контрольный GPS-приемник вырабатывает поправки, которые передаются потребителям по радиоканалу. Аппаратура потребителя в этом случае должна быть дополнена радиоприемником для получения дифференциальных поправок. Поправки, принятые от опорной станции, автоматически вводятся в результаты измерений. Это позволяет установить в районе опорной станции координаты объекта с точностью 1-5 м. Точность DGPS-определений зависит от характеристик опорной станции и от расстояния от объекта до опорной станции. По этой причине опорную станцию рекомендуется располагать не далее 500 км от объекта.
Существенной проблемой, снижающей эффективность системы GPS, является неточность геодезической съемки ряда районов Земли. GPS представляет координаты определяющихся объектов во всемирной геодезической системе WGS84. Существуют поправки для перехода от этой системы к ряду других геодезических систем. Однако не ко всем. Кроме этого, горизонтальный датум значительного количества навигационных карт неизвестен. В ряде районов Земли (например, островов Юго-восточной Азии), съемка которых производилась в далеком прошлом, из-за больших погрешностей опорных точек геодезической сети отличия координатной системы карты от WGS84 могут быть значительными. Из-за отсутствия поправок место судна в системе WGS84, перенесенное на такую карту, может оказаться на берегу.
Похожие работы
... электронных карт осуществляет IHO во взаимодействии с IMO . Электронная карта охватывает как термин три понятия : описание данных ; программное обеспечение для их обработки ; электронную систему отображения данных . Электронные карты могут быть , а могут и не быть эквивалентными бумажным картам , требуемым конвенцией СОЛАС-74 . Понятия хранения / передачи и отображения данных электронной ...
... времени могут быть также переданы в программные пакеты которым необходима информация для всевозможного моделирования, например создания цифровых моделей местности (ЦММ). Выводы: 1) Система глобального позиционирования являет собой инструмент с огромным потенциалом и широчайшим кругом использования. 2) Навигационные возможности систем могут оказать неоценимую помощь в поиске и спасении людей, в ...

... , что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система. · ГЛОНАСС Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР. Принадлежит министерству обороны России. Является попыткой ...
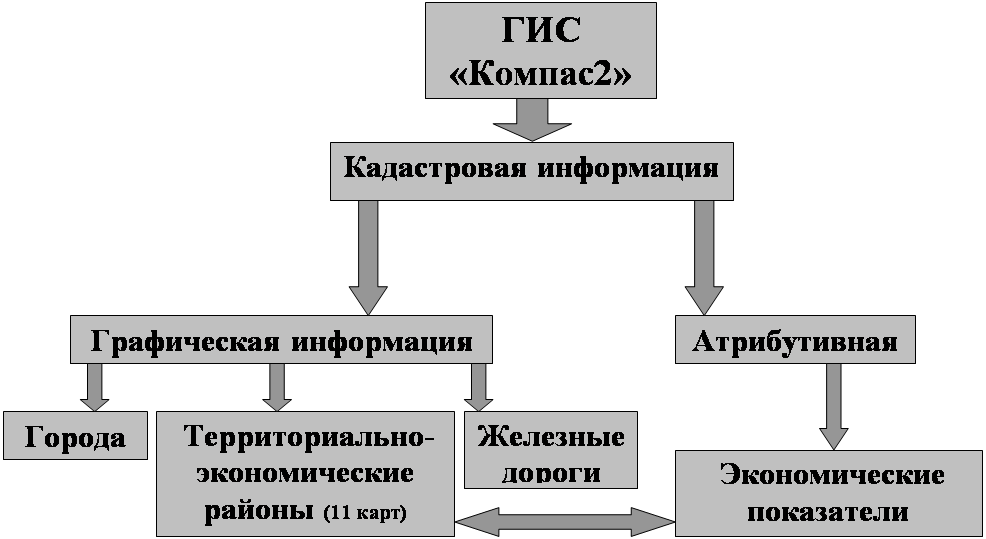
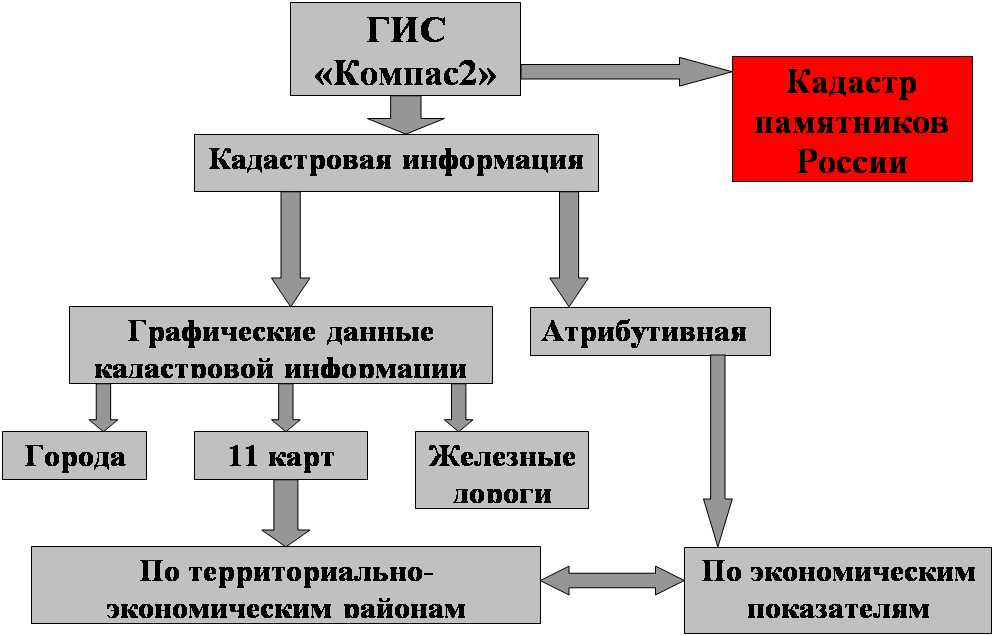
... кадастра памятников России и привязки его к ГИС «Компас-2», я изучил возможности, функции ГИС «Компас-2», а также возможность использования его для создания различных видов природных кадастров. Компас-2 – это сетевая система для представления, моделирования и анализа географической информации Функциональные возможности системы КОМПАС 2: публикация географической информации (ГИ) в сетях ...
0 комментариев