Электронные карты
Геодезическая основа отсчета координат ЭК
Разграфка электронных карт
Формат для обмена картографической информацией
Корректура электронных карт
Основные принципы построения АКС
Обеспечение АКС
Информационно-программное обеспечение НИКС
Другие базы данных
Справочная система НИКС
О НИКС как о центре судовой информационной сети
Планирование пути
Контроль прохождения маршрута
Регистрация информации
Управление движением судна
Анализ информации основных внешних навигационных датчиков НИКС
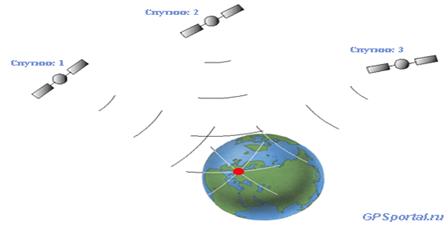
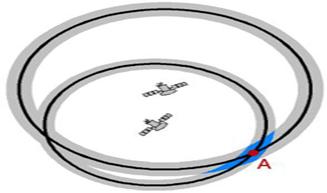
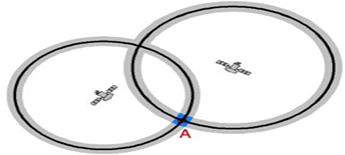
Анализ информации СНС
Краткая характеристика системы «ГЛОНАСС»
Автоматические идентификационно-информационные системы
Функции АИС, предоставляемые сведения, частота обновления данных
Ограничения АИС
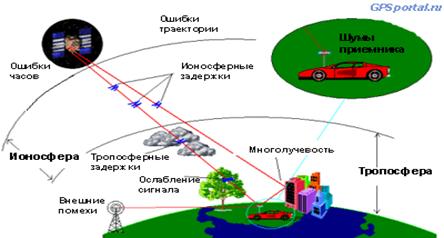
Погрешности, обусловленные ошибками датчиков информации
Данные ЭК и их структура
Предварительная прокладка
IEC Protocol 61162-1 "Digital Interfaces - .Navigation and Radiocommunication Equipment On Board Ship"
Навигация
Анализ информации основных внешних навигационных датчиков НИКС
Электронные системы отображения навигационных карт
223834
знака
6
таблиц
7
изображений
4. Анализ информации основных внешних навигационных датчиков НИКС
4.1. Основные навигационные характеристики датчиков информации
Для решения задач судовождения навигационно-информационная компьютерная система должна обеспечивать возможность подключения к ней различных датчиков информации: курсоуказателей (гирокомпаса, магнитного компаса с дистанционной передачей показаний, флюксгейт-компаса); лагов (относительного и абсолютного); эхолота, радиолокатора и САРП; приемников РНС, СНС, NAVTEX; а также УКВ транспондера АИС.
Касаясь позиционных средств, следует отметить, что основными из них при решении задач навигации морских судов стали космические системы GPS и ГЛОНАСС. Роль береговых систем определения положения снизилась. РНС «Омега» уже выведена из эксплуатации. Действие системы «Декка» планируется прекратить в 2002 году.
РНС «Лоран-С» по плану будет оставаться в эксплуатации для обеспечения надежности судовождения до 2015 года, и служить в качестве независимого средства, позволяющего обнаружить нарушения в правильности выдаваемой приемоиндикаторами СНС информации. Погрешность определения положения (Р=0.95) по РНС «Лоран-С» зависит от взаимного расположения судна и станций системы и лежит в пределах 0:1-0.25 NM (nautical miles - морских миль). Точность этой РНС может быть несколько увеличена за счет синхронизации работы наземных станций с помощью сигналов времени от СНС, погрешность которых составляет 10-15 нс.
Качество датчиков информации и их способность выполнять те или иные задачи в области судовождения принято оценивать навигационными характеристиками, которые зависят от технических параметров датчиков. К основным навигационным характеристикам датчиков информации относятся: зона действия (диапазон измерений) разрешающая способность, точность, надежность, помехозащищенность, продолжительность одного измерения и частота измерений.
Диапазон измерений Ym определяется минимальным Ymin и максимальным Ymax значением измеряемой величины: ![]() ,
,
Под разрешающей способностью ∆Y понимается определенная минимальная величина приращения измеряемого параметра, которая еще может быть измерена прибором. Разрешающая способность ряда измерительных устройств может быть вычислена через допустимую относительную погрешность е прибора, выраженную в процентах:
![]()
Точность представляет собой характеристику допускаемых при измерении погрешностей. Общепринятым критерием точности в судовождении является величина 95% погрешности измерения параметра (Р=0.95).
Под надежностью понимается способность аппаратуры выполнять свои задачи в течение определенного времени. Надежность аппаратуры характеризуется вероятностью безотказной работы, временем наработки на отказ и другими характеристиками.
Под помехозащищенностью понимается способность прибора сохранять свои навигационные характеристики в условиях действия различных помех.
Продолжительность одного измерения (определения) - это временной интервал от момента начала измерения навигационного параметра до момента выдачи результата измерения. Когда такое время мало, измерения называются мгновенными.
Частота измерений (определений) характеризуется интервалом времени между двумя последовательными измерениями навигационного параметра. Когда такая частота является достаточно высокой, измерения считаются непрерывными.
4.2 Курсоуказатели и лаги
Гирокомпасы. Основным курсоуказателем на судах является гирокомпас. Это достаточно надежный и точный прибор. Он Непрерывно измеряет курс судна в диапазоне 0-360°. Его точность при Установившемся режиме движения судна ухудшается с ростом широты места. На точность ГК влияют маневрирование судна и качка. Согласно требований ИМО в установившемся режиме движения судна точность ГК должна быть в пределах ±0.25°secφ. Инерционная погрешность ГК при маневрах в широтах до 70° не должна превышать: при быстром изменении скорости на 20 уз - ±2.0°; при быстром изменении курса на 180° при скорости 20 уз. - ±3.0°. Для компенсации скоростной погрешности в ГК вручную или автоматически должны вводиться скорость судна и широта места.
Лаги являются датчиками скорости судна и проходимого им расстояния. В настоящее время на судах применяются относительные и абсолютные лаги. Первые измеряют скорость судна относительно воды, а вторые - относительно грунта.
Лаги современных судов должны измерять скорость на переднем и заднем ходу. Из относительных лагов такой способностью обладают индукционные лаги. Диапазон измеряемых индукционным лагом значений скорости судна зависит от вида лага. Для лагов гражданских морских водоизмещающих судов этот диапазон обычно находится в пределах от -15 до +35 узлов. Инструментальная погрешность лага зависит от климатических условий. При относительной влажности 65±15% и температуре воздуха 0-50°С она меньше ±0.2 уз. При отрицательной температуре воздуха погрешность колеблется в пределах ±0.2-1.0 уз. Счетчик пройденного расстояния позволяет снять отсчет с точностью ±0.02 мили. Снос судна течением индукционный лаг не учитывает.
Для измерения скорости относительно грунта применяются гидроакустические доплеровские и корреляционные лиги. Они с высокой точностью измеряют скорость судна, как на переднем, так и на заднем ходу. Рабочие глубины этих лагов не превышают 200-300 м. При плавании на больших глубинах эти лаги работают в относительном режиме. В этом режиме при измерении скорости не учитывается течение. Доплеровские и корреляционные лаги обычно измеряют продольную и поперечную составляющие скорости судна. Поэтому ввод от них скорости в НИКС должен быть двухкоординатным.
Точность измерений доплеровским лагом скорости в абсолютном режиме работы составляет около ±2%, пройденного расстояния - примерно ±0.2%, угла сноса - ±0.2°.
Корреляционный лаг по сравнению с доплеровским лагом имеет следующие преимущества:
• одновременно с измерением скорости измеряется глубина под килем;
• на точность измерения скорости судна не влияет изменение скорости звука;
• широкие диаграммы направленности акустических антенн не требуется стабилизировать на качке.
Корреляционный лаг также характеризуется высокой точностью:
погрешность измерения скорости составляет до ±0.1 уз, пройденного расстояния - до ±0.2%, глубины под килем - ±1%.
Похожие работы
... электронных карт осуществляет IHO во взаимодействии с IMO . Электронная карта охватывает как термин три понятия : описание данных ; программное обеспечение для их обработки ; электронную систему отображения данных . Электронные карты могут быть , а могут и не быть эквивалентными бумажным картам , требуемым конвенцией СОЛАС-74 . Понятия хранения / передачи и отображения данных электронной ...
... времени могут быть также переданы в программные пакеты которым необходима информация для всевозможного моделирования, например создания цифровых моделей местности (ЦММ). Выводы: 1) Система глобального позиционирования являет собой инструмент с огромным потенциалом и широчайшим кругом использования. 2) Навигационные возможности систем могут оказать неоценимую помощь в поиске и спасении людей, в ...

... , что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система. · ГЛОНАСС Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР. Принадлежит министерству обороны России. Является попыткой ...
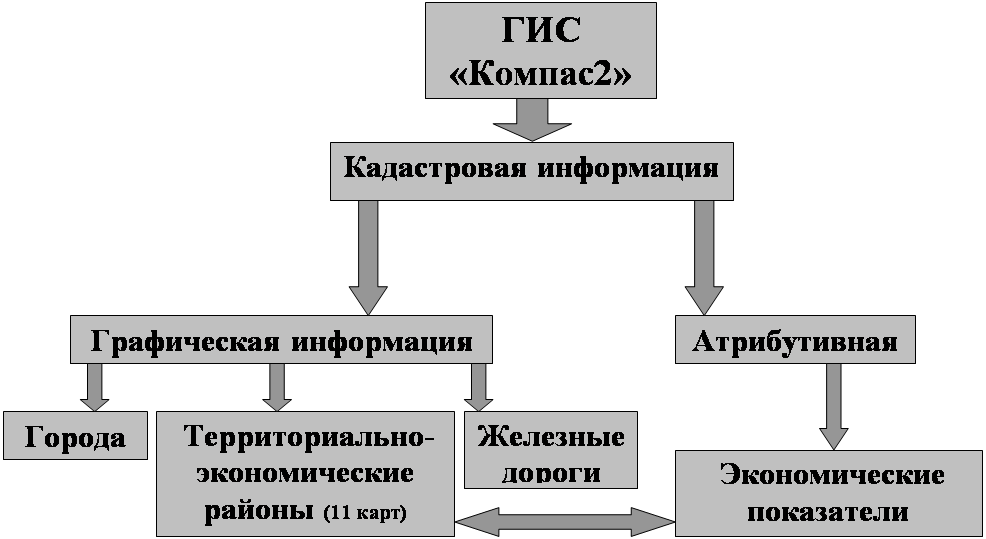
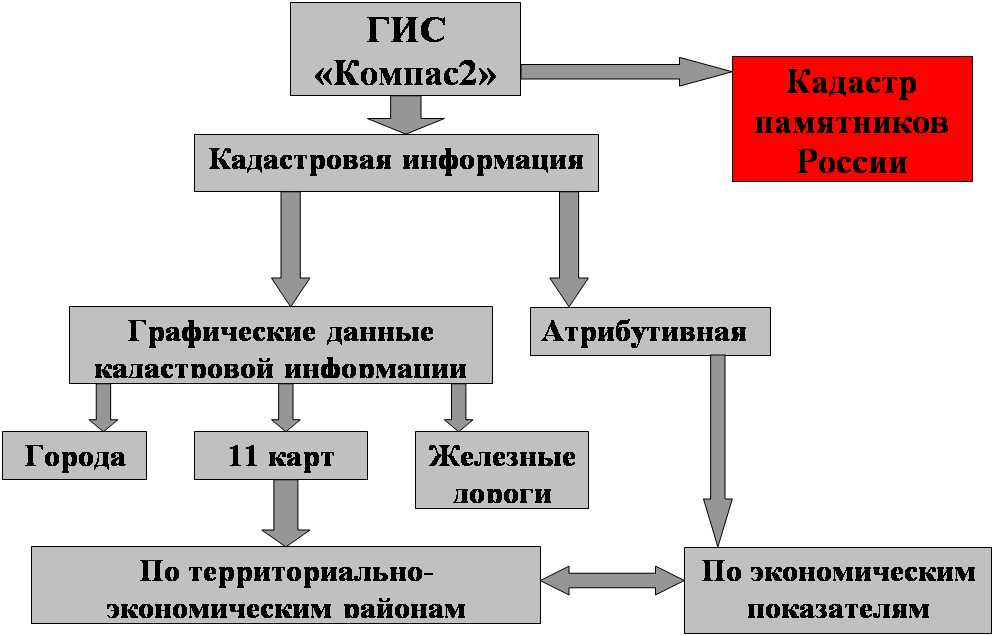
... кадастра памятников России и привязки его к ГИС «Компас-2», я изучил возможности, функции ГИС «Компас-2», а также возможность использования его для создания различных видов природных кадастров. Компас-2 – это сетевая система для представления, моделирования и анализа географической информации Функциональные возможности системы КОМПАС 2: публикация географической информации (ГИ) в сетях ...
0 комментариев