Блок-схема ЭВМ по фон-Нейману и ее реализация в ПК
Конструкция и аппаратный состав IBM PC
Структурная схема системной платы РС i386DX
Кбайт, имеющая возможность расширения до 128 Кбайт;
Кбайт быстрой памяти на каждые 4 или 16 Мбайт;
Система ввода-вывода оперативной информации
Аппаратные средства диагностики РС
Если POST-программа выполнилась, BIOS формирует для CPU команду чтения загрузочного сектора с FD (дисковод А:), привода CD или HD (дисковод С:)
Принципы локализации неисправностей в персональных компьютерах
Ошибки при прогоне прикладных программ
Тест-программы в среде Windows
Функциональный контроль АПС
Проверить наличие двуполярного питания выходных схем передатчиков;
Контроль функционирования аппаратно-программных комплексов
Навигация
Система ввода-вывода оперативной информации
Техническая диагностика средств вычислительной техники
509004
знака
6
таблиц
0
изображений
1.5.1 Система ввода-вывода оперативной информации
Система ввода-вывода оперативной информации ЭВМ включает в себя клавиатуру и дисплей, обязательно входящие в ВС. В случае РС, в базовый комплект дополнительно могут входить манипулятор типа "мышь", или трекбол, или сенсорная панель и джойстик.
1.5.1.1) Средства ввода оперативной информации
Обычная клавиатура выполняется на контактных или бесконтактных датчиках нажатия клавишей. Простейшие клавиши при их нажатии просто замыкают столбец выбора со строкой выбора нажатой клавиши. Это – клавиши шилдовой конструкции, самые простые и дешевые. Их недостатки: малая надежность, из-за возможности попадания пыли и вязких жидкостей под контакты, и – ограниченный срок службы контактов вследствие усталости металла и окисления. Разновидностью шилдовой клавиатуры является пленочная (мембранная) клавиатура, в которой контактные площадки и замыкающие перемычки выполнены печатным способом на гибком слое диэлектрика (лавсановой или ПЭТФ-пленке). Эта клавиатура менее чувствительна к пыли, влажности, но и менее долговечна, чем шилдовая, из-за старения пленки, не вполне удобна в эргономическом смысле (оператору привычнее получить какой-то тактильный "отзыв" на нажатие, иначе он непроизвольно начинает сильнее давить на клавиши, от чего больше устают пальцы). Такие типы клавиатуры технологически проще, следовательно – дешевле.
Лучше работают клавиатуры герконовой конструкции (ГЕРметизированный КОНтакт), где контакты клавишей герметизированы в стеклянной ампуле и управляются миниатюрным постоянным магнитом, перемещаемым плунжером клавиши. Магнит должен перемещаться вдоль оси геркона, иначе чувствительность геркона падает, и надежность срабатывания уменьшается.
Контактные пластинки геркона выполняются не из стали, а для уменьшения остаточной намагниченности – из чистого железа. Иначе, остаточно намагниченные пластинки останутся притянутыми друг к другу и при отсутствии внешнего магнитного поля. Чистое железо, как известно, очень активно окисляется, поэтому ампула заполняется восстановителем окислов – водородом. Тем не менее, герконовая клавиатура все-таки не очень надежна, – иногда возникают "залипания" контактов из-за остаточной намагниченности контактов. Кроме того, герконовая клавиатура толще пленочной или шилдовой, так как герконы приходится располагать вертикально.
Более надежны клавиши с датчиками Холла. Эффект Холла заключается в том, что если через кристалл полупроводника пропустить электрический ток, то на боковых гранях кристалла разности потенциалов не образуется. Но если этот кристалл с током поместить в магнитное поле, перпендикулярное направлению тока, то на боковых гранях, перпендикулярных как направлению тока, так и направлению магнитного поля, образуется разность потенциалов, пропорциональная силе тока и напряженности магнитного поля. Устроены клавиши с датчиками Холла так, что при нажатии клавиши постоянный магнит перемещается плунжером в зону датчика, а при отпускании – выходит из нее. Это вполне надежная клавиатура, но достаточно дорогая, ими снабжаются специальные, а не простые персональные компьютеры.
Другой способ съема нажатия клавиш использует магниторезистивный эффект – свойство некоторых материалов, в том числе и полупроводниковых, изменять свое сопротивление в зависимости от напряженности магнитного поля. Клавиши с датчиками Холла или магниторезисторами часто имеют встроенное в модуль клавиши электронное пороговое устройство (триггер Шмидта), которое четко фиксирует нажатие-отпускание клавиши и устраняет "дребезг контакта", свойственный всем контактным системам.
Встречаются клавиатуры с емкостными датчиками нажатия, когда при нажатии на клавишу увеличивается емкость между строкой и столбцом матрицы клавишей. Они тоже достаточно надежны, но требуют для своей работы высокочастотного генератора не только для синхронизации микроЭВМ контроллера любой клавиатуры, но и дополнительного генератора для датчиков клавиатуры емкостного типа.
При установке клавиатуры в РС следует убедиться, что BIOS правильно реагирует на скан-коды, выдаваемые KBD. Клавиши в узлах матрицы располагаются чаще по системе QWERTY, реже – по системе Дворака-Дилея, а для русифицированных машин – по системе ЙЦУКЕНГ, однако, существуют и другие варианты расположения клавиш, на скан-коды которых BIOS может реагировать неадекватно.
При нажатии шилдовой, пленочной или герконовой клавиши сопротивление контакта уменьшается теоретически от бесконечности до нуля, но практически в меньших пределах и, что хуже всего, – немонотонно, что вызывает так называемый "дребезг контакта", приводящий к тому, что контроллер клавиатуры фиксирует несколько нажатий и отпусканий при каждом однократном нажатии клавиши. Это проявляется в виде нескольких повторов приема кода нажимаемой клавиши. Для уменьшения "дребезга контактов", в простых KBD на каждую клавишу ставился интегрирующий RC-фильтр. Это самое простое, но не самое лучшее решение: RC-фильтр заметно уменьшает сигнал, снимаемый с клавиши, его частотные характеристики не оптимальны, он плохо фильтрует низкочастотные составляющие и задерживает сигналы нажатий клавишей. В кодирующей клавиатуре IBM PC и его клонов, для защиты от "дребезга", контроллером KBD вводится задержка в несколько миллисекунд от появления первого сигнала нажатия до его обработки, за которые дребезг должен закончиться. Достаточно совершенная система антидребезговой защиты включает до 128 попыток чтения нажатой клавиши и код сканирования матрицы клавишей считается достоверным, только если не менее 32 попыток подряд дают один и тот же код, иначе код считается фантомным и отфильтровывается.
Манипулятор "мышь" очень удобен при работе с графикой и оболочками ОС, использующими пиктограммы, но он может только фиксировать координаты курсора на экране, а вводить символьную информацию "мышью" слишком долго и неудобно.
Одна разновидность манипулятора "мышь", Mouse Serial, подключается к СОМ-порту и использует IRQ4 для СОМ1 или IRQ5 для СОМ2. Другая, System Mouse, подключается к системной шине через специальный контроллер.
Распределение сигналов на разъеме последовательной "мыши" следующее:
DATA – 2 / 3,
GND – 5 / 7,
+5 V – 4, 7 / 4, 20,
-5 V – 3 / 9.
Здесь номера контактов перед символом слэж относятся к 9-контактному разъему СОМ-порта, а после – к 25-контактному.
Манипулятор трекбол – вращающийся шар, также предназначен для фиксации координат курсора на экране монитора. Он не требует дополнительного места на столе, более надежен в работе (нет соединительного кабеля) и часто используется в РС конструкций LapTop. Работать с ним менее удобно, чем с мышью, так как для нажатия кнопок на "мыши" у вас свободны пальцы, а для работы с трекболом приходится переносить пальцы на кнопки.
В последнее время в РС, особенно конструкций LapTop, применяется сенсорная панель, называемая также Wersa Glade или Thouch Pad. Она очень удобна при работе с ОС, использующими пиктограммы, и не имеет недостатков “мыши” и трекбола. Для работы с ней нужно просто водить пальцем по небольшой сенсорной панели, расположенной на стандартной клавиатуре и курсор на экране повторяет движения пальца по сенсорной панели. Еще один вид манипулятора – Track Point, представляет собой небольшую кнопку, расположенную на стандартной клавиатуре в районе малой клавиатуры управления курсором. По сути эта кнопка работает как джойстик: в зависимости от направления нажатия на нее – влево, вправо, вверх или вниз в том же направлении смещается и курсор на экране. Trасk Point нажимают средним пальцем, а указательным и безымянным можно нажимать две другие, рядом расположенные клавиши, которые функционально идентичны левой и правой кнопкам “мыши”.
Манипуляторы типа джойстик предназначены исключительно для игр, авто- флай- и им подобных симуляторов. Джойстики выпускаются в двух модификациях:
- Кемпстон-джойстик, и
- пропорциональный джойстик.
Первый только фиксирует положение рукоятки подобно клавишам управления курсором на стандартной клавиатуре, а пропорциональный работает как "мышь", смещая курсор на экране монитора пропорционально углу отклонения рукоятки джойстика от вертикального положения. Оба джойстика используются исключительно с игровыми программами и симуляторами (имитаторы управления автомобилем, самолетом и т. п.).
Все вышеперечисленные устройства ввода требуют именно своих, специализированных средств программной поддержки (Firm Ware), т.е. соответствующих программ и драйверов.
К устройствам для массового или специального ввода информации в РС относятся сканеры, дигитайзеры (сколки) и т. д.
Контрольные вопросы.
1.Какие устройства входят в подсистему ввода-вывода оперативной информации РС?
2. Какие типы клавиатур используются в ПЭВМ?
3. В чем достоинства и недостатки KBD шилдовой системы?
4. Какие типы клавиатур наиболее надежны в работе?
5. Какие меры антидребезговой защиты применяются в РС?
6. Какие типы манипуляторов используются в РС?
7. Как подключается к РС serial mouse? system mouse?
8. Что за манипулятор Wersa Glade?
9. Какие разновидности джойстиков используются в РС, их особенности и области применения.
1.5.1.2) Средства вывода оперативной информации
Для вывода оперативной информации из РС используются дисплей и регистрирующие устройства – принтеры. Дисплей может быть выполнен:
- на вакуумном кинескопе телевизионного типа,
- на жидкокристаллической панели,
- на газоразрядной панели,
- на светодиодной матричной панели.
Видеомонитор на вакуумном кинескопе для обычного домашнего, офисного, управленческого использования часто подходит лучше всего. Он использует давно отработанный в телевидении способ формирования цветного изображения, обладает вполне хорошими скоростными характеристиками, высоким разрешением, яркостью и контрастностью, но тяжел по весу, громоздок, боится ударов и требует для своего питания высоких напряжений (до 25 киловольт), в связи с чем, имеет повышенный фон мягкого рентгеновского излучения. Но последнее заметно снижается применением специальных светофильтров или особой технологией изготовления стекла экрана, а остальные недостатки для стационарных условий эксплуатации не столь существенны.
Жидкокристаллическая панель (ЖКИ) имеет малый вес, конструктивно плоская, очень экономична, не требует для питания высоковольтных источников питания, мало чувствительна к ударам и пыли. По сравнению с видеодисплеями телевизионного типа, ЖКИ-панель имеет почти такую же разрешающую способность, но несколько уступает TV-дисплеям по скоростным характеристикам. Видеокарта поддерживает полосу частот видеосигнала в 35 МГц, что соответствует минимальному времени релаксации пикселей дисплея порядка 30 мксек. Дисплей на ЭЛТ практически обеспечивает время релаксации порядка 100 мксек, тогда как время релаксации современных ЖКИ-панелей превышает 8 мсек. Кроме того, качество изображения на ЖКИ-панели зависит от направления взгляда: при обзоре ЖКИ-панели с углов более 300 от перпендикуляра к плоскости экрана, изображение теряет четкость и цветовую яркость. Так что ЖКИ-дисплеи для работы со скоростными мультимедийными приложениями, могут быть рекомендованы только с известными ограничениями.
В последних моделях ЖКИ-дисплеев многие из их недостатков уже устранены использованием современных высоких технологий, поэтому сейчас компьютеры все больше комплектуются именно ЖКИ-мониторами.
Газоразрядные панели используют свечение разреженного газа в электрическом поле. Плоские, легкие, но только монохромные, с относительно невысокой разрешающей способностью и требуют для своего питания повышенного напряжения (100-120 вольт). Используются в РС специального назначения.
Светодиодные панели (СДП) – плоские, яркие, управляются низким напряжением, цветные, ударопрочные, быстрые, но их разрешающая способность уступает телевизионным кинескопам и ЖКИ-панелям, так как каждый цветной пиксель образован тремя светоизлучающими кристаллами полупроводника, да и мощность потребления СДП довольно значительна (порядка 500 Вт).
Интерфейс видеоподсистемы.
Видеосигналы управления монитором вырабатываются не системной платой, а на адаптерах-контроллерах монитора, вставляемых в слот расширения системной шины, или интегрированных непосредственно на системную плату компьютера.
Плата (карта) видеомонитора, называемая также видео-картой, содержит схему поддержки алфавитно-цифровой информации, она же может поддерживать режим побитовой графики, в отличие от векторной графики, когда изображение формируется не из точек, пикселей, а из отрезков линий.
Видеокарта, в зависимости от ее назначения, может вырабатывать следующие сигналы:
- полный видеосигнал (выведен на разъем RCA),
- набор RGB-сигналов и сигналов строчной и кадровой синхронизации (выведен на 9- или 12-контактный разъем, расположенный под разъемом RCA).
RCA работает с видеовходом монитора подобно видеоплейеру с телевизором. В этом случае, дисплей должен уметь работать с полным видеосигналом, характеристики изображения при этом получаются несколько хуже, а монитор – сложнее.
RGB-монитор обрабатывает:
- три цветовые составляющие: R, G и В (красная, зеленая, синяя),
- сигнал яркости (интенсивности),
- сигналы синхронизации растра.
Видеокарта содержит встроенную RAM, в которую программно записываются страницы информации, подлежащие выводу на дисплей. Видеопамять (VDRAM) видео-карты имеющая объем 256 Кбайт и более, начинается с адреса, определяемого типом видеосистемы (MDA, CGA, VGA, SVGA) и содержит в алфавитно-цифровом режиме по два байта на символ – код символа ASCII и код атрибута символа. Код атрибута определяет цвет символа, цвет фона, яркость символа, негативность высветки символа, режим мерцания.
В чисто графическом режиме, не работе псевдографикой, при которой каждый элемент деловой графики – тоже некоторый символ, видео-RAM содержит полную бинарную копию экрана с атрибутами каждого пикселя. Контроллер видеокарты для этого должен быть соответственно перепрограммирован.
Для вывода на экран алфавитно-цифровой (АЦ) информации, код символа ASCII должен быть переработан в точечный образец символа, который в дальнейшем и будет воспроизведен на экране. Это преобразование происходит в ПЗУ (или ОЗУ) знакогенератора видеоконтроллера. Опрос знакогенератора происходит по адресам, соответствующим ASCII-кодам символа, из которых считывается уже матрица 8х8 или более точек, составляющая собственно образ символа на экране.
Упрощенная блок-схема видеоадаптера VGA приведена на рисунке 1.9.
┌─────┐
┌──────┐ ┌─────┐
┌────┐
канал в/в │ ШнФ │ │видео-│ │ ПЗУ │ ┌──────┐ │ ЦАП│ сигнал
─────────>│ │──┬──>│память│────>│ │──>│Рг сдв│──>│ │──────>
│ │ │ │ │ │ │ ┌>└──────┘ │
│ яркости
└─────┘ │ └──┬───┘ └──┬──┘ │ ┌─────────>│
│
│ │ряд в строке│ │ │ гаш.курс │ │
│ ┌──┴──┐─────────┘ сдв│ │ ┌──────>└────┘
┌───────┐ └──>│контр│──────────────┘ │ │ аттр.
│ген. ТИ│────>│ ЭЛТ │────────────────┘
│
└───────┘ │ │───────────────────┘
RGB
│ │──────────────────────────────────────>
│ │ ┌─────────┐ ┌─────┐ КСИ
│ │─────>│секвенсор│────>│ ФКИ │─────────>
│ │ │ │─┐ └─────┘
└─────┘
└─────────┘ │ ┌─────┐ ССИ
└──>│ ФСИ │─────────>
└─────┘
Рисунок 1.9.. Блок-схема видеоадаптера VGA.
На приведенной схеме:
Контроллер ЭЛТ – основная компонента адаптера – СБИС VGA IC.
Генератор точек символов – ПЗУ МК3600 от 8х8 до 9х16 точек в матрице символа.
Видеопамять – 4 секции по 64 Кбайт.
Рг сдв – регистр сдвига, преобразующий параллельный код строки матрицы символа в последовательность яркостных точек в строке экрана.
ЦАП – добавляет к ним бланкирующие сигналы и сигналы гашения обратного хода луча, а также определяет режим вывода символа (яркий, мигающий и т. д.) и формирует амплитудно-модулированный сигнал яркости для ЭЛТ.
Контроллер ЭЛТ, в зависимости от атрибутов символа, формирует сигналы цветов символа и фона, мерцания, негативности, яркости.
Секвенсор формирует сигналы кадровой (КИ) и строчной (СИ) синхронизации генераторов разверток дисплея.
ФКИ и ФСИ – формирователи кадровых и строчных импульсов синхронизации соответственно.
Генератор ТИ синхронизирует работу видеоадаптера и имеет две кварцованные частоты 25,175 и 28,322 МГц; меньшая – для вывода 8-битовой строки символа, большая – для 9-битовой.
Разрешающая способность дисплея программируется в секвенсоре через контроллер ЭЛТ. Сам контроллер ЭЛТ тоже программируется и, используя информацию об атрибутах символа из VIDEO-RAM, управляет цветовыми и яркостным каналами, вырабатывает синхросигналы разверток, следит за тем, чтобы номер строки выводимого символа соответствовал строке на экране, определяет частоту сдвига в регистре сдвигов, в зависимости от требуемого разрешения (числа точек в строке), и регенерирует VIDEO-RAM. В нем же есть регистр положения курсора на экране и признак его выключения.
Для повышения разрешающей способности дисплея против телевизора, где частота строк составляет 14600 Гц, видеомонитор работает с частотой строчной развертки 31500 Гц, а кадровой – 60-100 Гц, против телевизора, где полукадровая частота 50 Гц при чересстрочной развертке. Получаемая при этом разрешающая способность видеомонитора составляет от 640х480 до 1600х1200 пикселей по горизонтали и вертикали соответственно, в зависимости от типа и режима работы видеомонитора.
Полоса частот канала яркости видеомонитора составляет 35 МГц (скорость включения/выключения пикселей) вместо 4,5 МГц в телевизоре.
Разъем интерфейса видеомонитора VGA – 9-контактный, типа DIN, со следующим распределением сигналов:
1 – GND (0 в)
2 – GND
3 – R (красный)
4 – G (зеленый)
5 – B (синий)
6 – I (яркость)
7 – не задействован
8 – КСИ
9 – ССИ.
Упрощенная блок-схема монитора VGA приведена на рисунке 1.10.
/│
┌─────────┐ ОС / │
┌─────┐ ┌─────┐ ┌─────┐ │ ┌─────│ ───────────────────/
│
R ──>│ бу- │ │сигн.│ │видео│───┘ │ │) ││R ┌──\ /───┐ фокус │
G ──>│феры │──>│проце│──>│усил.│───────│─│────┐
│ \/ │ ┌┐ │
B ──>│ │ │ссор │ ┌>│ │───┐ │ │) ││G │кк /\ ск │ ││ │
└─────┘ └─────┘ │ └─────┘ │ │ │ │ / \ │ ││ │
┌────┐ ┌──────┐ │ │ │ │) ││B │ / \
│ ├┘ │
I ──>│ буф│──>│канал │─┘ └───┼─┼───┘ │ │ │ │ │ │
└────┘ │ ярк. │гашение обр. хода└──────────────────────────\
│
└──────┘───────────────────┘ │ │ │ │ │ \ │
┌──────────────────────────────────┘ │ │ │ │ ┌─\│
│ ┌────────┐ ┌───┐ ┌────┐ │ │ │ │ │
КСИ ┌─────────┐└─>│фазовый │ │ГСР│ │ УС │───────│────┘
│ │ │
──>│интерфейс│──>│детектор│──>│ │──>│ СР │───────│───────│─┘
│
──>│ СИ │─┐ └────────┘ └───┘ │ │───────│───────│────┘
ССИ └─────────┘ │ └────┘ │ │ +25 Кв
│ ┌───┐ ┌─────────────────────────┘ │ на 3-й
│ │ │ └>┌────┐ ┌────┐ │ анод
└──>│ГКР│──>│ ОУ │────>│ УС │───────────────┘
└───┘ └────┘ │ КР │
┌───────┐
└────┘
220в 50Гц │ Б П ├───> +120v
─────────>│ ├───> +80v
│ ├───> +24v
│ ├───> +5v
│ ├───> +12v
└───────┘
Рисунок 1.10. Блок-схема монитора VGA.
На приведенной схеме:
ФАЗОВЫЙ ДЕТЕКТОР СТРОК обеспечивает синхронизацию по фазе сигналов строчной развертки с синхроимпульсом ССИ от видеоадаптера.
ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ (ОУ) в канале КСИ, поддерживает начало развертки кадра синхронно с КСИ от видеоадаптера и корректирует фазу КСИ в зависимости от реального положения луча. Это позволяет точно выдерживать синхронизацию, устраняя дрожание пикселей и обеспечивая высокую разрешающую способность монитора.
ВЫХОДНОЙ КАСКАД СТРОЧНОЙ РАЗВЕРТКИ (УС СР) кроме формирования линейного тока развертки лучей в отклоняющей системе, вырабатывает высокое напряжение на фокусирующие электроды ЭЛТ (+6 КВ) и питание 3-го анода кинескопа (+25 КВ).
Блок питания монитора вырабатывает напряжения для выходных усилителей каналов яркости, цветности, строчной и кадровой разверток и дополнительно – напряжения +5 в, +12 в, +24 в для питания логики управления монитором.
Монитор VGA имеет высокое разрешение и подключается только к адаптеру VGA, но сам адаптер VGA может эмулировать также сигналы адаптеров CGA и EGA, т.е. позволяет работать с программами, рассчитанными на VGA, EGA и CGA.
Аналоговые входные сигналы RGB обеспечивают бесконечное число уровней, но видеоплата генерирует только 256 цветов. Сигналы цветности поступают на модуляторы соответствующих цветовых пушек кинескопа, а сигнал яркости - на их катоды.
К устройствам вывода из РС (АРМ) для получения "твердых копий" информации относятся принтеры, плоттеры (графопостроители) и другие подобные устройства.
Контрольные вопросы.
1. Какие типы дисплеев используются в РС?
2. В чем достоинства и недостатки ЖК-дисплея?
3. В чем достоинства и недостатки светодиодных матриц?
4. Какой тип дисплеев чаще всего используется в РС DeskTop и почему?
5. Какие функции выполняет видеокарта?
6. Какие составляющие имеет RGB видеосигнал?
7. Для чего служит видеопамять?
8. Где фактически расположена видеопамять?
9. Чем отличается информация видеопамяти в режиме графики от текстового режима?
10. Какой код принимает и обрабатывает видеосистема в текстовом режиме?
11. Каково назначение фазового детектора строк в видеомониторе?
12. Какую задачу выполняет операционный усилитель в канале кадровой синхронизации видеомонитора?
1.5.2 Система внешней памяти
1.5.2.1) Накопители на гибких магнитных дисках
В компьютерах IBM и совместимых с ними, использовалось более 30 типов НГМД, различающихся диаметром дискеты, высотой накопителя, плотностью записи и другими параметрами. Применялись дискеты диаметром 5,25" и 3,5" с удвоенной плотностью (40 дорожек на две поверхности 5,25" дискеты) и учетверенной (80 дорожек). В первом случае емкость дискеты составляет 360 Кбайт, во втором – 1,2 Мбайт. 3,5" дискеты имеют тоже 80 дорожек на каждой их двух поверхностей дискеты и емкость 1.44 Мбайт (дискеты емкостью 2,88 Мбайт появились, но широкого распространения не получили, из-за недостаточной надежности хранения информации).
Поперечная плотность записи часто обозначается числом дорожек на дюйм TPI (Track-Per-Inch). Так, дискеты с 48-ю TPI – двойной, а с 96-ю TPI – учетверенной, или высокой (high) плотности. Продольная плотность – это число бит на дюйм длины дорожки. Так как запись на дорожке концентрическая, а диаметр дорожек разный (у периферии диска – больше, а у центра – меньше), продольная плотность записи для разных дорожек дискеты разная, но число записанных импульсов (бит) на дорожку, в общем случае, одинаково и не зависит от номера дорожки.
Стандартные параметры дисководов определяют:
- диаметр дискеты,
- высоту дисковода,
- плотность записи,
- тип интерфейса,
- скорость вращения диска.
Для стандартных FDD PC расположение дорожек и число сторон неизменны, и определяются типом дисковода, а число секторов на дорожку и размер сектора определяются программно, в процессе форматирования дискеты. Поэтому гибкие диски еще называют дисками с программной разметкой секторов (Soft-Sector).
Размер сектора НМД, поддерживаемый системой BIOS, может быть 128, 256, 512 и 1024 байт, но
MS DOS ориентирована на размер сектора только в 512 байт.
Контроллеры дисководов в РС/ХТ и /АТ-286 используют частоту синхронизации 250 КГц (емкость 360 Кбайт), а РС/АТ-386 и выше – 500 КГц.
Дисководы 5.25" могли иметь следующие емкости:
- одинарная плотность – 180 Кбайт (уже не встречается),
- двойная плотность – 360 Кбайт (использовались только в очень старых РС-286),
- высокая (учетверенная) плотность – 1.2 Мбайт.
Дисководы 5,25”, как и дискеты для них, уже сняты с производства и могут встретиться только в очень старых компьютерах; впрочем, дисководы 3,5” уже тоже не перспективны, т.к. вытесняются более емкими, надежными, совершенными устройствами обмена информацией между компьютерами – компакт-дисками, DVD-дисками и дисководами и миниатюрными устройствами флешь-памяти.
Дисководы 3,5" более совершенны, чем 5,25” и могли иметь следующие емкости:
- 720 Кбайт (нормальная) – сейчас уже не встречается,
- 1.44 Мбайт (высокая) – обычная для современных РС,
- 2.44 Мбайт (высшая)– в серию так и не вышел.
Дисководы 5,25" на 360 Кбайт имели скорость вращения дискет 300 об/мин и 40 дорожек на каждую из сторон, дисководы 5,25” на 1.2 Мбайт имеют скорость вращения диска 360 об/мин и содержат по 80 дорожек на каждую сторону. Дисководы 3.5" емкостью 1.44 Мбайт имеют носитель с высокой разрешающей способностью и позволяют размещать 80 дорожек на сторону с 17 секторами на дорожку. При этом линейная плотность записи на таком диске может быть даже выше, чем у некоторых старых жестких дисков с 17 секторами на дорожку.
Так как скорости вращения дискет в дисководах невелики и повреждений головками магнитного покрытия дискет на таких скоростях не происходит, головки в рабочем положении прижимаются к поверхности дискет тарированными пружинками.
Для автоматического опознавания контроллером дисковода допустимой плотности записи на дискетах, в накопителях 3.5" имеется датчик плотности записи, а дискеты на емкость 1,44 Мбайт – специальное отверстие. Датчик дисковода определяет наличие или отсутствие этого отверстия и информирует контроллер о необходимой плотности записи, что определяет тактовую частоту и уровень тока записи в головке.
Совместимость дисководов разной плотности.
При работе на дисководе высокой плотности с дискетой удвоенной плотности возникают проблемы, Связанные с тем, что ширина дорожки на дискете емкостью 1.2 Мбайт вдвое меньше, чем на дискете емкостью 360 Кбайт:
- если дискета отформатирована на дисководе 360 Кбайт и записи сделаны на таком же дисководе, то такая дискета свободно читается дисководом на 1.2 Мбайт;
- если же на эту дискету записывать информацию на дисководе 1.2 Мбайт, то читаться дисководом на
1.2 Мбайт она будет, а дисководом на 360Кбайт нет, так как более широкая головка дисковода 360 Кбайт будет видеть одновременно две смежные дорожки от записи емкостью 1.2 Мбайт, т.е. информацию, записанную на двух соседних дорожках сразу;
- в случаях крайней необходимости записи информации на дисководе 1,2 Мбайт, а чтения дискеты – дисководом 360 Кбайт, нужно использовать чистую дискету, новую неформатированную, или старую, но специально размагниченную, разметить эту дискету на дисководе 1.2 Мбайт, но в формате 360 Кбайт, командой
FORMAT A: /F:360 (для DOS версии 4.0 и выше),
или
FORMAT A: /N/T:40 (для DOS версии 3.3),
т. е. разметить диск в формате 40 дорожек, 9 секторов на дорожку и с уменьшенным током записи; тогда, и только тогда, эта дискета, записанная на дисководе 1.2 Мбайт, будет читаться на дисководе малой плотности.
С дисководами 3.5" таких проблем нет, т.к. все 3.5" дисководы имеют одинаковую ширину дорожек.
Сопряжение НГМД с CPU
Функцию сопряжения FDD с CPU выполняет контроллер, освобождающий CPU от низкоуровневого управления приводом FDD: – включение-выключение шпиндельного двигателя, управление позиционированием головок на требуемый цилиндр, поиск и чтение сектора, перевод информации из параллельного кода в последовательный, и дополнение его синхросигналами при записи, обратная процедура при чтении, формирование интерфейса НГМД и т. д. CPU только управляет контроллером с помощью команд и слов состояния. Такая иерархия упрощает программирование ввода-вывода и повышает общую производительность вычислительной системы.
Связь НГМД с контроллером происходит посредством интерфейса SA-450 (фирмы Shugart Associated).
Среда интерфейса – два кабеля:
- кабель питания и
- кабель данных и управления.
Распределение контактов в разъеме питания следующее:
1 - +12в
2 - общий (0v)
3 - общий (0v)
4 - +5в
Распределение интерфейсных сигналов в разъеме данных и управления НГМД приведено в
таблице 1.6.
Таблица 1.6. Распределение сигналов в разъеме данных и управления НГМД:
КОНТАКТ
СИГНАЛ ВХОД/ВЫХОД НАЗНАЧЕНИЕ
со стороны ВЫСОК.ПЛОТН. ДВОЙН.ПЛОТН.
контроллера
1,2 reduced write O уменьшить ток записи резерв
3,4 reserved - резерв загрузить
головку
5,6 drive select 3 O выбор привода 3
7,8 index I индекс (начало дорожки)
9,10 drive select 0 O выбор привода 0
11,12 drive select 1 O выбор привода 1
13,14 drive select 2 O выбор привода 2
15,16 motor on O включить шпиндельный двигатель
17,18 direction select O направление шагов
19,20 step O шаг позиционирования головок
21,22 write data O записываемые данные
23,24 write gate O признак записи
25,26 track 0 I головки на нулевой дорожке
27,28 write protect I защита от записи
29,30 read data I считанные данные
31,32 side select O выбор головки (поверхности)
33,34 discette change I дискета сменена готов
все четные контакты разъема - сигналы интерфейса,
все нечетные - общий (0v)
Рекомендованный разработчиками вариант магистральной связи интерфейса НГМД показан на рисунке 1.11.
+5v
SN7438 (К155ЛА3) ┌┴┐ 744LS14 (К155ЛА11,ЛА18)
┌────┐ └┬┘220 oм ┌─────┐
────│ & o─────────┴── ─ ─ ─ ─ ─ ─ ─ ─ ─ ──┬─────o 1 │───>
────│ │ 330 ом ┌┴┐ │ │
└────┘ └┬┘
└─────┘
─┴─
Рисунок 1.11. Магистраль связи для НГМД.
Описание сигналов интерфейса RS232C.
Входные от контроллера:
Reduced Write – уменьшить ток записи в головке для амплитудной коррекции, при высокой плотности записи.
Drive Select 0, 1, 2, 3 – выборка дисковода с закоммутированным адресом (номером), соответствующим затребованному. Разрешает выбранному дисководу принимать все остальные сигналы от контроллера и выдавать данные, осведомительные сигналы и состояние – в контроллер.
Motor On – сигнал на включение шпиндельного двигателя. Через секунду после него возможны операции чтения/записи.
Direction Select – при высоком уровне на этом контакте разъема, сигнал STEP перемещает головки в направлении – от центра дискеты к периферии, при низком – от центра, к периферии.
Step – перемещает головку на один шаг позиционирования (на одну дорожку). Длительность сигнала составляет 1 мксек.
Write Data – импульс, длительностью 150 нсек, вызывает запись бита на диск при активном уровне сигнала Write Gate.
Write Gate – признак записи. Разрешает работу канала записи дисковода. Он должен оставаться активным (нижний уровень) в течение 4–8 мксек после последнего записываемого бита данных. Перед поступлением этого сигнала шпиндельный двигатель должен быть включен, а головки прижаты.
Side Select – выбор верхней (при низком уровне SS = L) или нижней (при высоком уровне SS = H) головки (стороны диска).
Выходные от дисковода:
Index – сигнализирует о начале дорожки.
Track 0 – сообщает контроллеру, что головка находится на начальной, нулевой дорожке.
Write Protect – активный уровень сигнала (WP=L) предупреждает контроллер, что запись на дискету запрещена (заклеено окно защиты записи на дискете 5,25", или поднята задвижка защиты записи на 3,5" дискете). При этом запись невозможна и контроллер, при попытке записи, сообщает программе о защите дискеты от записи.
Read Data – выход считанной с дискеты смеси информационных и синхронизирующих сигналов.
Discette Change – используется только в РС/АТ, для сигнализации о проведенной смене дискеты. В РС/АТ копия таблицы FAT дискеты хранится в буфере ОЗУ и используется для поиска нужных секторов. При смене дискеты старая таблица становится недействительной и должна быть считана с дискеты заново.
Формат дорожки НГМД имееет следующую структуру:
| AMS |CRC ams| ПОЛЕ ДАННЫХ | CRC поля Dn | ECC поля данных |
здесь
AMS – адресный маркер сектора в формате: № цил. - № головки - № сектора на дорожке,
CRC ams – циклическая контрольная сумма адресного маркера,
ПОЛЕ ДАННЫХ – содержание информации в секторе,
CRC поля Dn – циклическая контрольная сумма поля данных,
ECC – код исправления ошибок в поле данных.
Контроллер i8272 (отечественный аналог – КР1810ВГ72А) предназначен для чтения, записи, форматирования гибких дисков с одинарной (FM), удвоенной (MFM) и высокой плотностью в формате "IBM SYSTEM 34".
Функционирование контроллера НГМД.
Работа контроллера НГМД, на примере чтения сектора.
Процедура чтения сектора состоит из шести шагов:
1) включение шпиндельного двигателя накопителя, соответствующего запрошенному адресу;
2) выполнение команды поиска сектора и ожидание прерывания от контроллера, указывающего, что сектор найден и информация считана в буфер сектора без ошибок;
3) инициализация контроллера DМА, для пересылки данных из буфера сектора контроллера в оперативную память;
4) посылка команды ЧТЕНИЕ буфера сектора и ожидание прерывания от контроллера, указывающего, что пересылка данных в память завершена;
5) получение информации о состоянии (статусе) контроллера;
6) выключение шпиндельного двигателя.
Подробнее:
1) Посылка от CPU байта с адресом дисковода. Например, 1Сh – включить дисковод А:. Бит 2 = 1 в этой команде указывает, что головки должны остаться на текущей дорожке, если же бит 2 = 0, то требуется выполнить рекалибровку дисковода, т.е. предварительно установить головки на нулевую дорожку.
2) Команда ПОИСК передает байт, в котором указан номер искомой дорожки. После окончания поиска дорожки контроллер инициирует прерывание типа IRQ6 (для АТ), по которому BIOS устанавливает бит 7 статуса поиска = 1 (сектор найден).
3) Инициализация DMA (8237), состоящая из пяти шагов:
- посылка кода чтения 46h, или кода записи 4Ah в порты 0В и 0С DMA;
- вычисление 20-битового адреса памяти буфера в DRAM, куда будут посылаться данные из буфера сектора;
- засылка вычисленного адреса в регистры адреса 04h и страницы 81h канала 2 DMA;
- декремент регистра-счетчика байтов канала 2 (порт 05h) DMA;
- разрешение работы канала 2 DMA (передача байта 02h в порт 0Аh).
Инициализация контроллера DMA переводит его в ожидание данных от накопителя, а драйвер обмена данными с контроллером дисковода (BIOS) должен начать посылку командного файла в контроллер НГМД для пересылки данных.
4) Посылка в контроллер дисковода командного файла ЧТЕНИЕ или ЗАПИСЬ, соответственно. После этого через DMA передаются данные из НГМД в ОЗУ, или наоборот.
5) В фазе контроля, контроллером вырабатывается прерывание и происходит его обработка драйвером BIOS, которая считывает и анализирует байты состояния контроллера по команде ЧТЕНИЕ СОСТОЯНИЯ. Если используются процедуры DOS или BIOS, то байты состояния помещаются в область данных BIOS, начиная с адреса 0040:0042, а байт статуса дискеты сохраняется в адресе 0040:0041.
6) Выключение шпиндельного двигателя происходит через 5 секунд после завершения обмена. Выдержка в 5 секунд нужна, чтобы не проводить заново процедуру включения двигателя, если за это время потребуется новое обращение к НГМД.
Контрольные вопросы.
1. Какие частоты синхронизации используются в FDD?
2. Какую емкость сектора FDD поддерживает MS DOS?
3. Можно ли использовать для чтения/записи на дисководе высокой плотности дискету, отформатированную и записанную на дисководе с удвоенной плотностью записи?
4. Каков порядок поиска нужного сектора на дискете?
5. Какие аппаратно-программные и аппаратные средства РС используются для пересылки считанных с дискеты данных в ОЗУ?
6. Что такое рекалибровка дисковода?
7. Как осуществляется контроль считанной с дискеты информации?
8. Находятся ли в контакте с поверхностью дискеты головки НГМД при чтении/записи?
1.5.2.2) Накопители на жестких магнитных дисках
Накопитель на жестком магнитном диске (НЖМД, HDD,) содержит:
- пакет дисков,
- блок головок чтения/записи,
- привод головок (позиционер),
- плату электроники и интерфейса.
Диски и головки.
Особенность конструкции HDD в том, что диски, головки и позиционер помещены в герметичный бокс, называемый HDA (Head Disk Assembly – сборка жесткого диска) и встроенная в него система циркуляции воздуха содержит наружный и внутренний фильтры, защищающие диски и головки от пыли. Во время работы, НЖМД очень чувствительны к тряске и ударам: микро-аварии головок (кратковременные падения головок на поверхность диска) приводят к неустранимому повреждению магнитного покрытия пластин дисков. По этим причинам разборка HDD, без повреждений накопителя, в неспециализированных условиях практически невозможна.
Воздушная подушка, возникающая при вращении дисков, благодаря аэродинамической форме держателей головок, держит головки над поверхностью дисков на высоте 2-5 мкм, т. е. головки не находятся в контакте с диском, что, вместе с защитой от пыли, позволяет использовать плотность записи в 20 – 30 раз большую, чем на дискетах.
Головки НЖМД по технологии их изготовления могут быть композитными, ферритовыми или тонкопленочными. Первые – тяжелее, обеспечивают зазор между головками и поверхностями дисков в 10-20 микродюймов, сравнительно дешевы, позволяют достичь плотности записи в 1500 TPI. Тонкопленочные – используют специальный полупроводниковый кристалл; они легче, допускают зазор до 6 микродюймов и позволяют достичь плотности записи до 2000 TPI и больше.
Позиционер.
Позиционеры в НЖМД ранее использовались двух типов: с шаговым двигателем (ШД) и с соленоидным приводом (СП), последний называется также позиционером с подвижной катушкой.
Сравнительные характеристики дисководов с шаговым и соленоидным приводами приведены в таблице 1.7.
Таблица 1.7. Сравнительные характеристики дисководов с шаговым и соленоидным приводами.
ПАРАМЕТР ШД СП
скорость позиционирования малая высокая
чувствительность к темпе-
ратурным изменениям высокая нет
чувствительность к ориен-
тации дисковода высокая нет
автопарковка головок нет есть
обслуживание периодическое нет
надежность малая хорошая
сложность малая высокая
стоимость низкая высокая.
Система с шаговым двигателем – система "открытого управления": сколько выдано сигналов ШАГ, столько и выполнено перемещений головок по цилиндрам. Считается, что головки автоматически точно устанавливаются на дорожки, но, при изменениях температуры, диски сжимаются или расширяются, поэтому позиционирование получается не вполне точным, следовательно, чтение – не вполне устойчивым, особенно при включении холодной системы. В настоящее время жесткие диски с шаговым двигателем не выпускаются и их можно встретить только в очень старых компьютерах типа IBM-286.
Соленоидный привод, вследствие существенных преимуществ перед приводом с ШД, что хорошо видно из приведенной выше таблицы 1.7, начал применяется в накопителях, емкостью более 100 Мбайт и используется во всех современных жестких дисках.
Накопитель с СП имеет специальный сервопривод, следящий за тем, чтобы головка устанавливалась точно на цилиндр. Для этого одна из поверхностей пакета дисков (служебная) содержит специальную информацию, записанную уже на заводе-изготовителе, и не участвует в запоминании данных, не форматируется и не может быть восстановлена после повреждений. Эта поверхность называется DSS (Dedicaded-Servo-Surface) и содержит также индексные метки, соответствующие цилиндрам и секторам диска.
В некоторых типах дисков, сервоинформация пишется в процессе форматирования просто между дорожками. Дисководы с выделенной поверхностью – более быстродействующие и позволяют большие плотности TPI, а с сервоинформацией, встроенной между информационными дорожками имеют большую надежность хранения информации в условиях колебаний температуры, когда взаимные размеры служебного и рабочих дисков могут изменяться.
Соленоидная система привода – это система "с замкнутой петлей управления". Сервосистема, имея 100% отрицательную обратную связь, постоянно следит за положением головок относительно дорожек и корректирует его в процессе работы.
Парковка головок дисководов с соленоидным приводом – пружинная, а дисководов с ШД электрическая, что, в последнем случае, требует автономных источников тока (накопительных емкостей) питания привода для парковки головок при нештатных отключениях питания.
Плата электроники.
Плата электроники, называемая иногда интерфейсной платой, содержит:
1) схемы управления шпиндельным двигателем,
2) схемы управления позиционером,
3) тракт чтения информации с диска,
4) тракт записи информации на диск,
5) элементы конфигурирования дисковода,
6) формирователи сигналов от датчиков ИНДЕКС, TRACK-0,
7) схемы сопряжения электроники диска с интерфейсом дисковой системы по уровням, логике и т.д.,
8) разъемы для подключения компонент накопителя, интерфейса связи с адаптером дисков и питания.
Для выработки сигналов INDEX и TRACK-0, в HDD нет оптических датчиков, как в FDD, а используются специальные индексные дорожки. После включения питания и разгона шпиндельного двигателя ищется служебная дорожка "–1", устанавливается внутренний счетчик цилиндров, головки перемещаются на цилиндр 0 и сигнал TRACK-0 передается через интерфейс контроллеру. Индексная "дорожка –1" содержит специальную метку для опознания дорожки именно как "–1".
Эксплуатационные характеристики HDD.
Номенклатура HDD включает много типов дисководов, отличающихся:
- максимальной емкостью,
- интерфейсом,
- форм-фактором (физическими размерами),
- быстродействием,
- надежностью,
- стоимостью.
Емкость жестких дисков бывает от 20 Мбайт до 80 Гбайт и выше. Дисководы емкостью более 100 Кбайт имеют всегда соленоидный привод и специальное покрытие дисков – напыление магнитного слоя особой структуры, и, тем самым, отличаются повышенными допустимыми продольной и поперечной плотностями записи.
Быстродействие дисковода определяется временем произвольного доступа к информации и зависит от организации хранения данных на диске, скорости вращения пакета дисков и скорости позиционирования головок.
Время доступа к информации на диске складывается из:
1) времени установки головок на требуемый цилиндр и времени успокоения позиционера;
2) времени ожидания подхода искомого сектора к головкам;
3) времени чтения информации с найденного сектора;
4) скорости передачи данных из буфера сектора в DRAM компьютера.
Среднее время установки головок составляет:
для РС/ХТ – 40 - 65 мсек,
для РС/АТ – 28 -40 мсек,
для РС386 – 12 - 20 мсек.
Скорость передачи данных определяется, главным образом, применяемым методом кодирования (FM, MFM, RLL), используемым интерфейсом, наличием буферов данных и их объемами.
Максимальная скорость считывания данных вычисляется как
Vmax = w * N * n * m,
где
w – скорость вращения шпиндельного двигаткля,
N – число секторов на дорожку диска,
n – емкость сектора (количество байтов в секторе),
m – число бит в байте.
Если принять распространенные значения: w = 3600 об/мин, n = 512 байт, m = 8, тогда скорость считывания данных будет определяться количеством секторов на дорожку данного диска
Так, накопитель с 17 секторами на дорожку должен иметь скорость передачи 4.177.920 бит/сек. Реально эту скорость достичь не удается, так как нужно время и для запоминания информации в ОЗУ РС, а пока контроллер и ПДП (или CPU) заняты передачей информации из буфера сектора в ОЗУ, диски продолжают вращаться, так что к концу передачи информации, считанной с предыдущего сектора, следующий сектор бывает уже недоступен (пройден идентификатор следующего сектора) и для чтения требуемого сектора придется ждать еще один оборот диска. Для РС/АТ ранних моделей без прокрутки лишнего оборота мог быть передан только каждый третий сектор, а для РС/ХТ только пятый.
Преодолеть этот недостаток позволяет прием, называемый фактором чередования секторов (Interleave). Смысл его в том, что физические сектора нумеруются (присваиваются адреса) не подряд, а так, чтобы к моменту окончания передачи считанных данных сектора, к головке подходил сектор со следующим по порядку адресом.
Например, при чередовании 3:1 сектора нумеруются в следующем порядке: 1, 7, 13, 2, 8, 14, 3, 9,15, 4 и т. д. Так что, пока контроллер обрабатывает данные из сектора 1, секторы 7 и 13 пройдут мимо головок и к считыванию будет готов сектор 2 и т. д. Выбор фактора чередования (а он устанавливается программно, во время низкоуровневого форматирования диска и записывается как один из параметров конфигурации HDD), должен быть проведен с учетом:
- быстродействия HDD,
- быстродействия контроллера,
- скорости обработки ввода CPU,
- наличия и скорости работы контроллера ПДП.
Вручную все это учесть достаточно сложно, но помогают некоторые программы тестирования из DOS и NU: CALIBRATE, ROM Diagnostic и др.
Важным, с точки зрения возможности установки HDD в корпусе РС, является форм-фактор:
- 5.25" полной высоты (82 мм), сейчас такие диски уже не выпускаются, но в компьютерах, выпущенных в 80 – 90 годы еще встречаются,
- 5.25" половинной высоты (41 мм),
- 3.5" половинной высоты.
Интерфейсы связи НЖМД с контроллером.
Средство связи HDD с контроллером, интерфейс, должен быть строго согласован для обоих этих устройств. В основном используются следующие типы интерфейсов:
ST-506 – с FM-кодированием, очень устаревший, использовался для РС/ХТ;
ST-506/412 – с MFM-кодированием. Этот интерфейс обладает свойством буферизованного (быстрого) поиска. Его достоинство в том, что он имеет встроенные средства автоконфигурирования и может автоматически изменять тип и параметры диска: число головок, номер цилиндра прекомпенсации, зону парковки головок.
Строго говоря, физические параметры, такие, как количество цилиндров (количество дорожек на каждой из поверхностей диска – определяется диаметром диска и шагом позиционера, управляемого от ШД или служебной поверхности DSS), количество головок (рабочих поверхностей пакета дисков), зона парковки головок, емкость неформатированного диска – неизменны и изменены быть не могут. Но для контроллера эти параметры могут быть и переопределены. Так число головок может быть условно увеличено за счет уменьшения числа дорожек, зона парковки при этом тоже изменится (оставаясь физически той же, самой близкой к центру, еще доступной позиционеру). Начальный цилиндр прекомпенсации при этом тоже изменится, но физически опять-таки оставаясь тем же;
IDE (AT BUS) – достаточно современный скоростной интерфейс, самый популярный до недавнего времени;
ST-412/RLL – интерфейс уже устаревший, но RLL-кодирование (Run Length Limited) поддерживает высокую продольную плотность записи (RLL 2,7 – максимальное число неперемагничивающихся элементарных ячеек носителя – 2 из 7). Способы кодирования FM и MFM тоже могут считаться разновидностями RLL: FM = RLL 0,1; MFM = RLL 1,3.
ESDI – вполне современный интерфейс, использует MFM- или RLL-кодирование и очень многие HDD выпускаются именно с этим интерфейсом;
SCSI – относительно новый тип интерфейса, весьма перспективный, поддерживает технологию P&P (Plug and Play – подключил-и-работай), но требует, чтобы HDD имел встроенный SCSI-контроллер, а сам контроллер шины SCSI является только HOST-адаптером, ведущим, выполняющим функции управления исполнительными контроллерами, которые находятся непосредственно в УВВ, и решает задачу стандартного сопряжения со всеми ведомыми УВВ.
Каждый из приведенных здесь интерфейсов требует, для соединений диска с контроллером (адаптером), своих шлейфов, отличающихся количеством проводов, типом используемых разъемов и даже – числом соединительных шлейфов. Полезно знать их разновидности:
Контроллер число проводов и шлейфов
ST506/412 34 управляющего и 20 – данных (два шлейфа)
ESDI 34 управляющего и 20 – данных (два шлейфа)
Адаптер
IDE 40
SCSI 50
Контрольные вопросы.
1. Как обеспечивается необходимый для работы дисковода зазор между головками чтения-записи и поверхностью диска в НЖМД?
2. В каких условиях можно разбирать Head Disk Assembly НЖМД?
3. Какие меры предосторожности следует принимать для защиты НЖМД от микроаварий головок?
4. Какие типы приводов головок используются в НЖМД?
5. В чем состоят достоинства и недостатки соленоидного привода головок НЖМД?
6. Для чего служит сервоповерхность пакета дисков НЖМД?
7. Из чего складывается время доступа к информации на диске?
8. Что такое фактор чередования секторов и как он влияет на производительность дисковой
системы РС?
9. В чем достоинства SCSI-интерфейса?
1.5.2.3) Устройства массовой памяти на сменных носителях
К устройствам массовой памяти на сменных носителях относят устройства, имеющие емкость, значительно превышающую емкость обычных дискет. Эти устройства предназначены для архивации данных, или для переноса больших объемов информации с одного компьютера на другой. В зависимости от назначения, такие устройства выполняются внутренними или внешними, стационарными или портативными. Большинство этих устройств имеют интерфейс SCSI или ATA. Портативные устройства часто имеют интерфейс подключения к параллельному порту, что облегчает их подключение к любому компьютеру, но приводит к проигрышу в скорости передачи информации и к повышенной нагрузке процессора при обмене данными. Устройства на сменных носителях, как дисковые, так и ленточные, могут и не иметь поддержки на уровне ROM BIOS, при этом доступ к ним становится возможным только после инсталляции специальных драйверов.
Сменные накопители на жестких дисках.
Накопители на жестких магнитных дисках могут иметь различные уровни сменяемости. НЖМД обычно устанавливается в компьютер надолго, и для его смены требуется частично разбирать системный блок. Существуют и специальные накопители, допускающие "горячую" замену (Hot Swap) без отключения питания и специальный конструктив, позволяющий снимать и устанавливать их прямо с лицевой панели, не разбирая системного блока. Выпускаются недорогие переходники типа Mobile Rack, позволяющие использовать, в качестве съемного, обычный АТА-диск, но следует иметь в виду, что обычные накопители все-таки боятся тряски и ударов, опасность которых при их переноске сильно повышается. Поэтому, больший интерес представляют накопители со съемными носителями.
Диски Бернулли.
Диски Бернулли (Bernoulli Removable Media Drive) используют 3,5" гибкие диски в жесткой кассете, объемом 35 – 150 Мбайт. При вращении диска со скорость 3600 об/мин возникает эффект Бернулли (воздушная подушка), поддерживающий головки на минимальной высоте от носителя, без непосредственного контакта с его поверхностью, подобно обычным НЖМД. По скоростным характеристикам, они близки к обычным НЖМД, а кассета устойчива к внешним воздействиям. Используются интерфейсы IDE, SCSI, или LPT-порта.
Кассетные жесткие диски.
Кассетные жесткие диски (SyQuest Removable Media Drives) используют специальные 5,25", 3,5" и 1,8" картриджи с жесткими дисками и, по скоростям обмена, они сравнимы с дисками Бернулли. Кассеты имею большую емкость, но более чувствительны к пыли, ударам и другим внешним воздействиям.
Гибкие магнитооптические диски.
Гибкие магнитооптические диски (Floptical Drives) представляют собой 3,5" диски сверхвысокой плотности и могут иметь емкости порядка 20 Мбайт (755 дорожек, 27 сект/дор по 512 байт/сектор). Высокая поперечная плотность записи в них достигается применением лазерной системы позиционирования головок. Скорость вращения диска 720 об/мин, интерфейс SCSI, ATA или специальный адаптер, позволяющий использовать их в качестве дисковода А: Накопитель совместим и с обычными 3,5" дискетами 720 Кбайт, 1,44 Мбайт, а с 2,88 Мбайт– только по чтению. Современные устройства LS-120 (Laser Servo 120 Мбайт) имеют емкость дискеты 120 Мбайт, по 1736 треков на каждой стороне с зонным форматом записи. Устройство использует интерфейc ATAPI и логическую геометрию – 960 цилиндров, 8 головок по 32 сектора на дорожку. Лазерное позиционирование позволяет использовать до 900 сервотреков. Накопитель существенно дешевле специальных магнитооптических устройств, но его удельная стоимость на единицу информации гораздо выше. Новые версии BIOS имеют поддержку этих LS-накопителей и позволяют включать их в последовательность загрузочных устройств.
Магнитооптические диски.
Магнитооптические диски (МОD – Magneto-Optical Drives), лазерную оптику используют в процессе магнитной записи. В них существенно уменьшен размер перемагничиваемых зон, потому что при записи зона перемагниченности определяется не шириной зазора магнитной головки, а только размером точки носителя, разогретой в данный момент лазерным лучом. Эти диски устойчивы даже к сильным внешним магнитным полям. Их емкость составляет от 128 Мбайт до 2,6 Гбайт. Устройства имеют интерфейс SCSI, или IDE и различаются плотностью размещения треков, методами модуляции – PWM (Pulse Width Modulation – широтно-импульсная модуляция), РРМ (Pulse Position Modulation – позиционно-импульсная модуляция), RLL 2.7 или RLL 1.7. Форматирование МОD на верхнем уровне может выполняться в стиле дискет или в стиле НЖМД. В первом случае, диск представляется в виде очень большой дискеты, в нулевом логическом блоке которой имеется программа-загрузчик (IPL) и дескриптор носителя, без таблицы разделов (Partition Table). При форматировании в стиле НЖМД, диск начинается с таблицы разделов и для ОС выглядит как жесткий диск, который, в случае SCSI-интерфейса может обслуживаться BIOS HOST-адаптера без всяких дополнительно инсталлируемых драйверов. Это позволяет загружать ОС с МОD, но не всякая ОС может верно отреагировать на смену носителя. Это может привести к потере данных, если ОС, после смены носителя, не обновит дескриптор носителя и FAT. Кстати, смена носителей в системе Macintosh иная, чем в IBM РС, поэтому накопители МОD с интерфейсом SCSI имеют переключатель "Mac-PC”, который должен быть установлен корректно. Форматирование МОD занимает до получаса, поэтому имеет смысл приобретать уже предварительно отформатированные диски.
Накопители на компакт-дисках.
Накопители CD-ROM (Compact Disk Read-Only Memory) используются в РС, в основном, для распространения и хранения дистрибутивных SOFT-продуктов, так как их емкость (до 650 МБ) и надежность хранения данных намного превышают те же показатели магнитных дискет. Параметры, приводимые в документации на CD-ROM-дисководы, характеризуют, в основном, их производительность, которая зависит от времени доступа, скорости передачи данных, наличия и емкости внутренних буферов и типа используемого интерфейса.
Дисководы CD-ROM по устройству напоминают НГМД, но имеют более сложную головку считывания. Головка состоит из лазерного излучателя, фотоприемника и зеркала, закрепленных на подвижной каретке. На той же каретке, на качающейся подвеске находится фокусирующая линза, управляемая подвижной катушкой. Привод подвески линзы, под управлением контроллера, встроенного в накопитель, обеспечивает точную фокусировку лучей оптической системы. При юстировке оптической системы, линза устанавливается параллельно плоскости диска с помощью регулировочных винтов на каретке. Механика привода достаточно проста, но неаккуратная чистка этой пластмассовой линзы может оставить на ее поверхности микроскопические царапины и тогда считывание данных с диска станет неустойчивым. Существуют дисководы с самоочищающимися линзами (Self-cleaning lenses) и для защиты от пыли могут иметь двойные пылезащитные шторки (Drive Sealing).
Наиболее простые дисководы имеют механизм лоточной подачи дисков, но при этом диск приходится брать руками; при этом диск можно уронить, испачкать, или поцарапать. В более совершенных накопителях (Caddy Type) компакт-диск укладывается в специальную защитную кассету типа 3,5”-дискеты и эта кассета просто вставляется в накопитель. Это предохраняет диски от случайного повреждения и позволяет загружать их в дисковод в любом положении. При частой смене дисков желательно иметь несколько таких кадди-кассет и даже прямо в них хранить архивные диски.
Накопители CD-ROM имеют форм-фактор соответствующий 5,25" дисководу половинной высоты.
Для компактных вариантов компьютеров существуют и малогабаритные накопители, размещающиеся прямо в корпусах Lap-Top или Note-Book.
Минимальной адресуемой единицей информации на диске является сектор, могущий содержать 2048 байт данных, защищенных от ошибок ECC-кодом, или 2324 (2336) незащищенных байт аудио/видео информации. Последовательность секторов одного назначения (формата) объединяется в трек. Минимальный размер трека – 300 секторов, максимальный – весь диск, на диске может быть до 99 треков. Начальный трек хранит информацию об организации диска (VTOC – Volume Table Of Contents).
Время доступа к данным на CD-ROM определяется так же, как и для жестких дисков. Оно равняется времени задержки между получением команды на поиск данных и моментом считывания первого бита данных. Это время для восьмискоростного (8х) CD-ROM составляет 100 мсек. и, в общем случае, уменьшается с увеличением скорости вращения диска. Напомним, что запись на CD-ROM происходит всего на одну спиральную дорожку длиной более 5 км (221188 витков с поперечной плотностью записи около 600 витков/мм). Продольная плотность записи не зависит от радиуса витка, потому что угловая скорость вращения диска изменяется от витка к витку так, чтобы линейная плотность записи оставалась постоянной на протяжении всей спирали.
Первые накопители имели собственные интерфейсы Sony, Panasonic, Mitsumi – по именам их производителей. Все эти интерфейсы напоминают 8-битовый вариант шины АТА, но несовместимы ни с ней, ни друг с другом, и требуют специальных драйверов, соответствующих типу дисковода. Современные CD-дисководы выпускаются с интерфейсами SCSI и АТА (ATAPI), и поддержку CD-ROM часто встраивают в BIOS. При этом, для устройства АТА, тип диска указывать не нужно, он будет опознан автоматически. В дисковый сервис Int13h введены новые функции, позволяющие для накопителя CD-ROM эмулировать дискету или жесткий диск LBA, а также загружать ОС с CD-ROM. Спецификация загружаемого диска позволяет создавать на CD образ системной дискеты 1,2 Мбайт, или 1,44 Мбайт, или образ жесткого диска, с которых может быть загружена ОС.
Для подключения накопителей CD-ROM к системе, используются, в основном, три разновидности интерфейсов:
- SCSI/ASPI (Small Computer System Interface/ Advanced SCSI Programming Interface);
- IDE/ATAPI (Integrated Drive Electronics/ AT Attachment Packet Interface);
- специализированные, "фирменные" интерфейсы.
Взаимодействие между CD-ROM и HOST-адаптером SCSI, а также другими совместимыми устройствами, осуществляется с помощью стандартного программного интерфейса ASPI. Он состоит из двух частей:
1) программы-драйвера ASPI-Manager, обеспечивающей взаимодействие HOST-адаптера SCSI с операционной системой и общее взаимодействие устройств с шиной SCSI;
2) входящих в систему ASPI драйверов для отдельных подключаемых к интерфейсу устройств. С помощью каждого из индивидуальных драйверов организуется взаимодействие периферийного устройства с основным (HOST) SCSI-адаптером и программой ASPI-Manager.
SCSI/ASPI наиболее подходящий интерфейс для CD-ROM. Он позволяет добиться высокой производительности системы и подключать к HOST-адаптеру 7 и более дисководов, но SCSI-интерфейс достаточно дорог, и если не планируется подключать к шине SCSI никаких других периферийных устройств, кроме накопителя CD-ROM, более рационально – установить интерфейс IDE/ATAPI.
IDE/ATAPI является дополнением к интерфейсу АТА (АТ Attachment), к которому обычно подключаются НЖМД. Строго говоря, ATAPI – это стандартный программный расширенный интерфейс для накопителей CD-ROM, который преобразует команды SCSI/ASPI к стандарту IDE/ATA. Он позволяет быстро приспособить новые модели дисководов к работе с интерфейсом IDE и сохранить совместимость IDE-накопителей CD-ROM с программой MSCDEX, обеспечивающей их взаимодействие с DOS. В Windows имеется драйвер для CD-ROM – CDFS VxD (CD File System Virtual Device). Дисководы ATAPI иногда называют расширенными IDE-накопителями (Enhanced IDE), поскольку в них используется одноименный интерфейс (электрически – АТА).
В большинстве случаев IDE/ATA-накопители CD-ROM подключаются ко второму разъему (каналу) интерфейса, а первый – используется для НЖМД. Во многих современных звуковых платах также устанавливаются драйверы ATAPI и специальные разъемы для подключения CD-ROM, но к одному вторичному IDE-разъему можно подключить не более двух дисководов CD-ROM, иначе – лучше использовать SCSI.
Существуют и другие немаловажные для эксплуатации CD-ROM факторы, такие как:
- пылезащищенность;
- автоматическая очистка линз;
- тип накопителя – внешний, или встраиваемый в РС.
Пылезащищенность важна для CD-ROM, как ни для одного из других устройств РС, так как пыль и грязь, попадающие в оптическую систему или механизм накопителя, приводят, в лучшем случае, – к снижению быстродействия системы (при ошибках чтения потребуются повторные поиск и чтение секторов), а то и к потере читаемости дисков. В некоторых накопителях узлы оптической системы размещаются в специальных герметизированных отсеках, а в других – используются своеобразные "шлюзы" из заслонок (внутренней и внешней). Для чистки линз оптической системы CD-ROM можно воспользоваться специальным чистящим диском, но некоторые современные модели накопителей CD-ROM имеют собственное, встроенное устройство для автоматической чистки линз от пыли.
Дисководы CD-ROM выпускаются в двух исполнениях: внешний дисковод, и дисковод, встраиваемый в системный блок. Внешний тип накопителя более прочен, чем встраиваемый, но он больше по габаритам и занимает отдельное место на столе. Такой тип следует выбирать, если в системном блоке РС нет свободного отсека для установки CD-ROM-накопителя, или недостаточен запас мощности источника питания (внешний накопитель имеет собственный источник питания), или один и тот же накопитель планируется подключать по очереди к нескольким компьютерам. Если в каждом из них уже установлен свой HOST SCSI-адаптер, то достаточно отсоединить разъем накопителя от одного РС и подключить к другому. Если подобных требований нет, то лучше использовать встроенный накопитель. Дополнительное удобство встроенного накопителя состоит в том, что его можно подключить к внутреннему разъему звуковой карты, а внешние разъемы шины использовать для других целей.
Записываемые оптические диски (CD-R), уже при изготовлении, имеют нанесенную ровную спиральную дорожку, по которой позиционируется записывающая головка. В отличие от магнитных и магнитооптических дисков, обеспечивающих произвольный доступ к искомой дорожке, как по чтению, так и по записи, на CD-R непрерывным потоком может быть записан только целый трек оптического диска. Так что по записи, CD-R является устройством с последовательным доступом. По утверждению изготовителей, время жизни записанных дисков CD-R составляет 75 лет – для "зеленых" и 100 – лет для "золотых" дисков. Однако срок хранения диска до записи составляет всего 5-10 лет. В обозначении модели дисковода указываются его параметры: скорость записи, скорость считывания и объем буфера. Так, например, модель CDR-102 (2x4/512K) имеет скорость записи 2х (2х150=300 Кбайт/сек), скорость считывания 4х и объем буфера 512 Кбайт. Время наработки на отказ у CD-R значительно меньше, чем у CD-ROM. Время доступа к данным у CD-R больше, а скорость считывания ниже, чем у CD ROM из-за более сложной и тяжелой головки. Поэтому использовать CD-R – как CD-ROM, для регулярной работы, нецелесообразно.
Устройства с возможностью многократной записи на оптический диск называются CD-RW (ReWritable –перезаписываемые). В них используются многослойные диски с отражательной поверхностью, перед которой находится слой вещества, с изменяемой фазой состоянии (аморфное – кристаллическое). Это состояние при записи изменяется под воздействием лазерного луча. При считывании, лазерный луч оказывается промодулированным, вследствие разницы отражательной способности точек слоя, находящегося в аморфном или кристаллическом состоянии. Записанный таким способом диск может быть считан и обычным CD-ROM накопителем, если в него установлен достаточно чувствительный считывающий элемент.
Практически все CD-накопители могут воспроизводить и аудио-диски, для чего имеют встроенные ЦАП и аналоговый интерфейс с линейным выходом стереосигнала. Для проигрывания аудиодисков, накопители часто имеют кнопку, по которой можно включить воспроизведение без помощи программных средств. Если при запуске аудио диска индикатор на лицевой панели накопителя светится, а звука нет, то причиной может быть несовпадение аналогового интерфейсного кабеля с разъемом звуковой карты. В принципе, возможно считывание аудиоинформации с дисков в цифровой форме, по интерфейсу передачи данных, для дальнейшей цифровой обработки, или сохранения ее на другом носителе, но эту функцию поддерживают не все CD-накопители, хотя есть и накопители, считывающие аудиодиски с выходом на интерфейс, применяемый в цифровой аудио аппаратуре.
PD/CD – комбинированный накопитель, записывающий информацию на специальный носитель по методу изменения фазы вещества (Phase Сhange Disk), как в CD-RW. Носитель – многослойный диск в защитном картридже. В отличие от CD с одним спиральным треком, PD имеет концентрические треки, как у магнитных дисков. Шпиндельный двигатель накопителя поддерживает постоянную угловую скорость вращения, следовательно, дисковод имеет произвольный доступ к дорожкам. Время на разгон и торможение диска при переходе на другой трек не тратится, поэтому время доступа к данным, по сравнению с CD ROM, заметно снижается. Емкость PD-диска, как и у CD, составляет 650 Мбайт, но PD-диск не может быть считан накопителем CD-ROM. Однако, комбинированные устройства PD/CD (например, модель PD650) считывают и обычные CD, а тип установленного носителя, дисководом определяется автоматически. Большое преимущество PD перед CD – возможность многократных циклов стирания-записи, а недостаток – их несовместимость с CD.
Накопители на DVD-дисках.
По мере совершенствования технологии CD и их приводов, возникла потребность в увеличении емкости оптических носителей информации.
Фирма Sony, в союзе с восемью другими фирмами, в 1995 году предложила новый универсальный формат записи на CD – DVD (Digital Versatile Disk), который был активно поддержан практически всеми ведущими мировыми компаниями, потому что DVD удовлетворяет практически всем требованиям к воспроизведению видеоизображений, а также и к хранению цифровых данных. Иногда диски формата DVD отождествляют с цифровыми видеодисками Digital Video Disks, однако они не тождественны, т.к. последние являются только предшественниками дисков нового универсального стандарта Versatile.
DVD (Digital Video Disk) – диски, первоначально предназначавшиеся для цифровой видеозаписи с высокой плотностью, сейчас уже широко используются в компьютерной технике для записи и хранения цифровой информации. DVD-дисководы имеют форм-фактор такой же, как у CD-дисководов. Для повышения емкости, в них уменьшена ширина трека и размер хранящей ячейки, и снижена избыточность кодов коррекции ошибок (ECC).
Как и CD, диск формата DVD имеет диаметр 120 мм и толщину 1.2 мм.
В соответствии с первоначально принятым соглашением, DVD-диск выполняется односторонним и может содержать до 4,7 Гбайт информации (на самом деле – 4,3 Гбайт; производители DVD-дисков и накопителей в рекламных целях неверно трактуют единицы измерения информации).
В накопителях формата DVD рабочая длина волны, излучаемая лазером, по сравнению с CD, снижена с 0,78 до 0,63-0,65 мкм, что обеспечило возможность уменьшения штриха записи практически вдвое, а расстояние между дорожками записи – с 1,6 до 0,74 мкм. Кроме того, в накопителях стандарта DVD используется более узкой луч лазера, чем в приводах CD-ROM, поэтому толщина защитного слоя диска была снижена вдвое – до 0,6 мм. С учетом того, что общая толщина диска должна была остаться 1,2 мм, под предохранительный слой был помещен укрепляющий. На выполненном из соответствующего материала укрепляющем слое также можно записывать информацию. Это привело к появлению двухслойных дисков. Когда лазерным лучом считывается информация, записанная на втором слое, расположенном в глубине диска, луч беспрепятственно проходит через полупрозрачную пленку, образующую первый, наружный слой диска. Для считывания информации с первого слоя, оптическая система дисковода, по команде контроллера, меняет фокусировку луча так, чтобы луч был сфокусирован в плоскости первого, наружного полупрозрачного слоя.
Спецификация DVD сначала разрабатывалась для одностороннего однослойного диска, но позже появилась конструкция двухслойного диска, емкостью 8,5 Гбайт. Так, следующим шагом в развитии технологии DVD явилось создание двусторонних дисков, как однослойных, так и двухслойных, при этом емкость диска доведена до 9,4 Гбайт и 17 Гбайт соответственно.
В случае двустороннего DVD-диска используются два диска толщиной 0,6 мм, склеенные нерабочими сторонами в один диск, стандартной толщины в 1,2 мм. Для доступа к данным на второй стороне двустороннего диска его приходится переворачивать вручную. Несмотря на то, что этот промежуточный формат стал частью спецификации, предпочтительными следует считать приводы DVD, оснащенные двумя независимыми считывающими системами.
В настоящее время DVD-накопители выпускаются в разных модификациях, различающихся количеством рабочих сторон (SS, Single Side – односторонние; DS, Dual Side – двусторонние) и рабочих слоев на стороне (SL, Single Layer – однослойные; DL, Dual Layer – двухслойные). Существуют диски емкостью 4,7 Гбайт (SS/SL), 8,5Гбайт (SS/DL), 9,4 Гбайт (DS/SL) и 17 Гбайт (DS/DL).
Решающим достоинством спецификации DVD является и тот факт, что приводы DVD совместимы с CD-дисками как по чтению, так и по записи.
Спецификация HD-DVD и технология FMD.
В мае 2005 года корпорация Toshiba объявила о разработке трехслойного диска HD-DVD-ROM, емкостью 45 Гбайт. Емкость одностороннего однослойного диска стандарта HD-DVD-ROM составляет
15 Гбайт, однослойного двустороннего – 30 Гбайт. Достоинством формата HD-DVD, разрабатываемого совместно фирмами Toshiba и NEC, является его совместимость на физическом уровне с форматом DVD. Этому стандарту покровительствует организация DVD-Forum, кроме того, и Microsoft заявила о своем желании включить поддержку HD-DVD в новой операционной системе Longhorn.
Флуоресцентные диски.
Перспективным может оказаться и технология FMD (Fluorescent Multilayer Disk – многослойный флуоресцентный диск), разрабатываемая компанией C3D (Constellation 3D). Характеристики FMD поражают воображение: диск, размером со стандартный CD, вмещает до терабайта данных, при этом скорость чтения с него, может достигать 1 Гбайт/сек.
В основе работы FMD лежит не отражение от подложки лазерного луча, как у CD- и DVD-дисков, а флуоресценция – свечение вещества под воздействием луча лазера. Количество слоев в FMD, в существующих образцах, – несколько десятков, но теоретически их количество можно довести до тысячи, причем угловая скорость вращения диска в приводе будет даже меньше, чем у CD.
У многослойных дисков CD и DVD возникает проблема. Вследствие интерференции и некоторых других факторов, оказывается сложным различать свет, отраженный от разных слоев диска. Принцип работы флуоресцентного диска иной. Вначале, луч лазера фокусируется на определенном слое и вызывает его флуоресценцию, которая и регистрируется фотоприемником, причем материал, содержащий записанную информацию, при прохождении через него света, изменяет длину волны этого света. Чем больше путь луча света, тем большей становится длина его волны, поэтому есть возможность определять, где лежит слой, с которого происходит считывание. Более того, возможно одновременное считывание информации с нескольких слоев, лежащих один над другим.
Голографические накопители.
Голографические накопители HVD (Holographic Versatile Disk), как и флуоресцентные, тоже используют принцип хранения информации по всему объему запоминающего материала. Но, в отличие от флуоресцентных дисков, на светочувствительном материале с помощью лазерного излучателя регистрируются одновременно все фазовые характеристики (голограмма) записываемого объекта. В цифровом приложении, этот объект – цифровая матрица записываемой информации. По данным французского сайта Clubic, голографические накопители теоретически способны обеспечить скорость считывания данных до 1 Гбайт/сек. Первые серийные образцы голографических накопителей, емкостью 200-300 Гбайт, фирма Optware собиралась представить уже в 2006 году, а приводы под носители HVD, емкостью в 1 Тбайт – в 2007 году.
Стримеры.
Накопители на магнитной ленте (стримеры) являются типичными устройствами последовательного доступа. Носители – кассеты с магнитной лентой различного размера и емкостью – от 20 Мбайт до 2 Гбайт и более. Простейшие стримеры имеют интерфейс, совместимый с контроллерами НГМД, а более сложные используют собственную интерфейсную карту, или встроенный контроллер с интерфейсом SCSI или ATA (ATAPI). Стримеры с интерфейсом SCSI, внутреннего или внешнего исполнения, имеют большую производительность и поддерживаются большинством ОС на системном уровне.
Мини-картриджи для стримеров (Quarter-Inch Cartridge QIC) содержат ленту, шириной ¼" (6,25 мм). Распространенные стандарты QIC 40 и QIC 80 имеют продольную плотность записи 10000 бит/дюйм на 20 дорожках и 14700 бит/дюйм на 28 дорожках соответственно, и позволяют хранить сотни мегабайт на одной ленте. Еще большие объемы обеспечивают стандарты QIC 1350 и QIC 2100 – 1,35 Гбайт и 2,1 Гбайт соответственно, а большие QIC-картриджи вмещают до 13 Гбайт. Стримеры на кассетах для цифровой звукозаписи DAT (Digital Audio Tape) позволяют хранить до 12 Гбайт, а стримеры на 8-мм ленте с наклонно-строчной записью (как на видеокассетах) – до 20 Гбайт. Используются стримеры исключительно для архивного хранения очень больших объемов информации
С появление столь емких и надежных носителей и их приводов, как CD, DVD, HD-DVD, в цифровой вычислительной технике становится возможным сохранять в архивах, а не на рабочем магнитном диске, большие объемы информации, вплоть до дампов системных, программных и даже файловых областей рабочих жестких дисков.
Контрольные вопросы.
1. Для чего предназначены устройства массовой памяти на сменных носителях?
2. В чем особенности подключения накопителей на сменных магнитных дисках?
3. В чем особенности дисков Бернулли?
4. В чем заключаются недостатки жестких кассетных дисков по сравнению с дисками Бернулли?
5. Из чего складывается время доступа к информации на CD-ROM?
6. Как ускоряется время доступа к данным CD-ROM?
7. Какие разновидности интерфейсов подключения CD-ROM применяются в настоящее время?
8. Каково назначение программы-драйвера ASPI-Manager?
9. Как организуется взаимодействие периферийного устройства CD-ROM с основным (HOST) SCSI-адаптером и программой ASPI-Manager?
10. В чем состоит удобство использования технологии SCSI?
11. В каком случае более рационально установить интерфейс IDE/ATAPI?\
12. Какие существуют способы чистки линз накопителей CD-ROM?
13. Как провести конфигурирование HOST SCSI-адаптера?
14. Какое программное обеспечение необходимо для нормального функционирования CD-ROM?
15. Как правильно инсталлируется программное обеспечение накопителя CD-ROM?
1.5.3 Средства коммуникации компьютера
Персональные компьютеры снабжаются внешними интерфейсами, позволяющими расширить его функциональные возможности, подключая к нему через эти интерфейсы разнообразное периферийное оборудование, и обеспечивать коммуникации с другими АПС. В основном, средства коммуникации РС включают в себя COM-, LPT-, Game- и MIDI-порты, а также сетевые средства связи. Для обмена информацией между компьютером и высокоскоростными периферийными устройствами можно также воспользоваться возможностями USB-шины или шины Fire Wire (IEEE 1394). Обе эти шины используют высокоскоростной последовательный интерфейс но, с точки зрения коммуникационных задач, различаются тем, что шина USB ориентирована на периферийные устройства, подключаемые к хост-компьютеру. Единственный, но необходимый в той системе компьютер управляет всеми функциями – физическими периферийными устройствами, хабами или их комбинациями.
Шина IEEE 1394, в отличие от USB, позволяет интенсивный обмен не только между хост-компьютером и периферийными устройствами, а между любыми подключенными к ней интеллектуальными устройствами. Шина 1394 не требует централизованного управления со стороны РС, может даже его не иметь, или наоборот, подключать несколько РС. В последнем случае, шина 1394 может быть использована для объединения нескольких компьютеров и периферийных устройств в небольшую локальную сеть.
История интерфейсов соединения РС с удаленными устройствами подтверждает теорию спирального развития. Так, последовательный интерфейс COM-порта RS-232C, пришедший от связи с удаленными терминалами, использовался даже для подключения лазерных принтеров, но вскоре он был вытеснен из принтерных интерфейсов параллельным интерфейсом Centronics, реализуемым LPT-портом. Однако, по мере роста производительности принтеров, возможностей LPT-порта, даже с использованием быстродействующих режимов обмена IPP и ECP стандарта IEEE 1284, становится недостаточно. Те же проблемы встают и с подключением сканеров, внешних дисков, скоростных модемов и т. д. В результате исследований оказалось, что повысить скорости обмена можно переходом снова на последовательный интерфейс, дополнительно снимающий проблемы изготовления многожильных кабелей, с нормированными параметрами задержек сигналов, и многоконтактных разъемов.
В параллельном интерфейсе все биты передаваемого слова (обычно – байта) передаются по соответствующим параллельно идущим проводам одновременно. В РС традиционно используется параллельный интерфейс Centronics, реализуемый LPT-портами. В последовательном интерфейсе биты данных передаются последовательно, друг за другом, по одной линии. Для этого в РС используется
СОМ-порт в соответствии со стандартом RS-232C, но последние модели компьютеров имеют, как правило, и высокоскоростной канал последовательного типа, с шинами USB.
Очевидно, что, при одинаковом быстродействии приемо-передающих цепей и пропускной способности линий связи, по эффективной скорости передачи данных параллельный интерфейс должен превосходить последовательный, однако повышение производительности за счет увеличения тактовой частоты передачи, ограничивается волновыми характеристиками соединительных кабелей. В случае параллельного интерфейса, при повышении скоростей передачи данных начинает сказываться различие в задержках сигналов в разных линиях одного и того же интерфейса, вследствие не полной идентичности их проводов и контактных соединений. В последовательных интерфейсах, среда передачи данных тоже вносит ограничения на скорость передачи данных. Но, т.к. для последовательной передачи данных используется всего одна линия, а не набор линий, как в параллельных интерфейсах, фактор разброса задержек в разных линиях в последовательных интерфейсах отсутствует. Таким образом, повышение пропускной способности последовательного интерфейса оказывается дешевле, чем параллельного. К примеру, два пучка коаксиальных кабелей, каждый пучок толщиной в руку (параллельный интерфейс канала ЕС ЭВМ), и современный USB-кабель (последовательный интерфейс) имеют примерно одинаковую пропускную способность.
Важным параметром любого интерфейса является допустимое удаление соединяемых устройств. Оно ограничивается как частотными свойствами кабелей, так и помехозащищенностью интерфейсов. Помехи возникают от внешних источников электромагнитных излучений, и от соседних линий того же интерфейса (перекрестные помехи). Для защиты от таких помех используются парафазные приемо-передатчики и витые, даже экранированные пары проводов для каждой из линий передачи данных. Но ошибки в передаче возникают и от искажений уровней сигналов. В параллельном интерфейсе Centronics LPT-порта, используются сигналы уровней ТТЛ-логики (<0,8 В для логического нуля и >1,4 В для логической единицы), так что колебания амплитуды сигнала около 1 В могут вызвать дребезг приемника. В последовательном интерфейсе RS-232C СОМ-порта, используются сигналы с уровнем от –12 до –3 В (логическая единица) и от +12 В до +3 В (логический нуль), так что переключения приемника при изменениях сигнала в пределах от –3 до +3 В не происходит. Столь большая разница в помехозащищенности позволяет использовать для интерфейса RS-232C кабели длиной в десятки метров, а для интерфейса Centronics – лишь два-три метра.
С появлением интерфейсов USB и Fire Wire, появилась и новая характеристика интерфейса – топология соединения. Для интерфейсов RS-232C и Centronics практически однозначно применялась двухточечная топология РС – ВУ, или РС–РС. Правда, имелись исключения: строился моноканал на СОМ-портах для локальных сетей, но он был вытеснен более эффективной и подешевевшей технологией Ethernet. Стандарты IEEE 12843 для LPT-порта предусматривают соединения абонентов в цепочку (Daisy Chain) или через мультиплексоры, но и такие способы подключения пока широкого распространения не получили. USB и Fire Wire реализуют древовидную топологию, в которой внешние устройства могут быть как оконечными, так и разветвителями.
Другое важное свойство интерфейса – гальваническая развязка. “Схемные земли” устройств, связываемых по COM- или LPT-портам, оказываются связанными со схемной “землей” РС и, если между ними, до подключения интерфейса, была разность потенциалов (что практически всегда есть), то по общему проводу интерфейса потечет уравнивающий ток. Это очень плохо, т.к. падение постоянного напряжения на этом проводе приводит к смещению уровней сигналов, а падение переменного напряжения – к сложению полезного сигнала с переменной составляющей помехи, что, безусловно, сказывается на помехозащищенности каналов. С другой стороны, в случае обрыва, или неконтакта, а чаще всего – при подключении и отключении кабелей интерфейсов без выключения питания устройств, разность потенциалов прикладывается к сигнальным цепям приемников и передатчиков. Протекание через них уравнивающих токов, в момент соединения, неизбежно приводит к выходу их из строя. Из рассматриваемых интерфейсов гальваническую развязку обеспечивает только MIDI (одностороннюю, с напряжением до 100 вольт) и шина Fire Wire (полную, с напряжением изоляции до 500 вольт).
1.5.3.1) Коммуникационные порты СОМ и LPT
LPT-порт.
Порт параллельного интерфейса был введен в РС для подключения принтера (отсюда и его название Line PrinTer – построчный принтер) и, хотя через него подключается и большинство лазерных принтеров, которые по принципу работы не построчные, а постраничные, название порта “LPT” закрепилось основательно.
LPT- порт, для организации вывода по интерфейсу Centronics, поддерживается функциями BIOS. В процессе начального тестирования, POST-программа проверяет наличие параллельных портов по адресам 3BCh, 378h и 278h. и помещает базовые адреса обнаруженных портов в ячейки оперативной памяти РС 0:0404h, 0:040Ah, 0:040Ch, 0:040Eh, области BIOS DATA AREA. Эти ячейки хранят адреса портов с логическими именами LPT1 – LPT4, соответственно, причем нулевое значение адреса является признаком отсутствия порта с этим номером.
Контроллер порта содержит три регистра, размещенных в пространстве адресов ввода-вывода микропроцессора. Регистры порта адресуются относительно базового адреса, стандартные значения которого – 3BCh, 378h или 278h. Это регистры:
1) DR (Data Register) – 8-битовый регистр данных, содержимое которого выводится на линии Data [0/7] разъема порта. Адрес регистра DR равняется базовому. Тот же регистр DR, с использованием специальной процедуры, позволяет и принимать данные с линий Data [0/7]. Так, если в регистр DR сначала записать все единицы, а на контакты [2/9] разъема LPT-порта подать от терминального устройства через тот же интерфейс какой-либо другой код, то регистр DR запомнит этот код без всякого строба. Теперь микропроцессор может прочитать данные этого регистра DR и тем самым выполнить операцию ввода байта от терминального устройства;
2) SR (Status Register) – 5-битовый регистр ввода в порт состояния принтера, принимает сигналы Select, PaperEnd, Ack и Busy, соответственно. Адрес регистра на единицу больше базового;
3) CR (Control Register) – 4-битовый регистр управления, вырабатывает сигналы Strobe#, AutoLF#, Init#, и SlctIn#, соответственно. Подобно регистру данных позволяет и прием данных с разъема интерфейса. Адрес регистра на 2 больше базового.
Поиск портов по базовому адресу предполагаемого порта производится следующей процедурой:
- в регистр DR контроллера порта выводится тестовый байт AAh или 55h;
- затем выполняется ввод с того же адреса;
- если считанный байт совпал с записанным, считается, что LPT-порт найден и его адрес помещается в область данных BIOS.
Обнаруженные порты инициализируются записью и съемом в их регистры управления сигнала Init#, а затем – записью значения С0h, соответствующего исходному состоянию сигналов интерфейса.
BIOS поддерживает до трех, или четырех LPT-портов прерыванием INT17, обеспечивающим связь по интерфейсу Centronics. Этим сервисом драйвер порта осуществляет по готовности, не используя аппаратных прерываний, инициализацию, опрос состояния интерфейса, принтера и – вывод символа.
Программное прерывание BIOS INT17h обеспечивает следующие функции:
1) 00h – вывод символа из регистра AL микропроцессора по протоколу Centronics. При этом выводимые данные помещаются в выходной регистр порта и, дождавшись готовности принтера (снятие сигнала BUSY), формируется строб данных Strobe#;
2) 01h – инициализация интерфейса и принтера (установка начальных уровней управляющих сигналов);
3) 02h – опрос состояния принтера, чтение его регистра состояния.
При вызове INT17, номер функции задается в регистре АН микропроцессора, номер порта – в регистре DX. При возврате после любой функции, регистр АН содержит код состояния: биты регистра RS [7:3] (причем биты 6 и 3 инвертированы) и в бите 0 – флаг тайм-аута, который устанавливается при неудачной попытке вывода, если сигнал BUSY не снимается в течение времени, определяемого для данного порта.
Аппаратный интерфейс LPT-портов.
Стандартный LPT-порт является однонаправленным, его сигналы выводятся из компьютера на 25-контактный разъем DB-25S (розетка), который устанавливается непосредственно на плате контроллера. Если же контроллер порта интегрирован непосредственно в системную плату компьютера, то разъем LPT-порта может располагаться или на системной плате, или на вставке задней стенки системного блока. В последнем случае, разъем порта на системной плате соединяется с разъемом на задней стенке плоским шлейфом.
Каждый LPT-порт использует свою линию аппаратного запроса прерывания IRQ7 или IRQ5, 8-битовую внешнюю шину данных, 5-битовую шину сигналов состояния и 4-битовую шину управляющих сигналов.
Понятие интерфейса Centronics относится как к набору сигналов и протоколу взаимодействия, так и к 36-контактному разъему, устанавливаемому на принтерах. Отечественный аналог интерфейса Centronics интерфейс ИРПР-М.
Назначение сигналов интерфейса Centronics и их распределение по разъему принтера приведено в таблице 1.11.
Таблица 1.11. Сигналы интерфейса Centronics.
| Сигнал | Направление | Контакт | Назначение |
| Strobe# | выход | 1 | Строб данных. |
| Data [0:7] | выход | 2-9 | Линии данных. Data [0:7]. Контакт 2 – младший бит |
| Ack# | вход | 10 | Acknowledge – сигнал подтверждения приема байта, запрос на прием следующего. Может использоваться для формирования запроса прерывания. |
| Busy | вход | 11 | Занято. Прием данных возможен только при низком уровне сигнала |
| PaperEnd | выход | 12 | Высокий уровень сигнализирует о конце бумаги. |
| Select | выход | 13 | Сигнал о включении принтера. |
| AutoLF# | вход | 14 | Автоматический перевод строки. При низком уровне сигнала, принтер, получив символ CR (Carriage Return – возврат каретки), автоматически выполняет и функцию LF (Line Feed – перевод строки). |
| Error# | вход | 32 | Ошибка: конец бумаги, Off-Line (принтер не в связи с РС), или внутренняя ошибка принтера. |
| Init# | выход | 31 | Инициализация – сброс принтера в режим параметров по умолчанию, возврат головки к началу строки. |
| Slct In# | выход | 36 | Выборка принтера (низким уровнем сигнала). При высоком уровне сигнала принтер не воспринимает остальных сигналов интерфейса. |
| GND | - | 19-30,33 | Общий провод интерфейса. |
Процедура вывода байта состоит из следующих шагов:
1) вывод байта в регистр данных,
2) опрос регистра состояния и, если терминал не готов, ожидание готовности устройства (принтера),
3) установка сигнала строба данных.
Для вывода одного байта требуется, по меньшей мере, 4–5 машинных операций ввода-вывода с регистрами порта, так что скорость обмена невысока, при значительной нагрузке микропроцессора. Стандартный порт удается разогнать до скоростей, порядка всего 100-150 Кбайт/сек, при полной загрузке процессора, что явно недостаточно для печати на лазерный принтер.
Недостатки стандартного порта частично устраняли новые типы портов, появившиеся в компьютерах семейства PS/2, но, не будучи стандартизованными, такие порты требовали от их производителей использования собственных специальных драйверов. В 1994 году был принят стандарт на параллельный интерфейс IEEE 1284, определяющий режимы работы SPP (стандартный), EPP – двунаправленный и ECP (Extended) – двунаправленный, с возможностью аппаратного сжатия данных по методу RLE, использования FIFO-буферов в контроллере порта и DMA системной платы. В современных машинах, с LPT-портом на системной плате, режим порта – SPP, EPP, ECP, или их комбинация, задается программно в BIOS SetUp.
Контрольные вопросы.
1. Какие базовые адреса может иметь LPT-порт?
2. Какова разрядность регистра данных LPT-порта?
3. Какие номера прерываний может использовать LPT-порт?
4. Как использовать LPT-порт для ввода данных?
5. Как использовать LPT-порт для ввода данных?
СОМ-порт.
Последовательный интерфейс для передачи данных в каждую сторону использует по одной отдельной линии данных, по которой данные передаются в последовательном коде. Последовательная передача данных может осуществляться в асинхронном или синхронном режимах.
При асинхронной передаче, каждому байту предшествует один или два стартовых бита, сигнализирующих приемнику о начале очередной посылки, за ним следуют биты данных и, возможно, бит паритета (контроля четности). Завершает посылку стоп-бит, гарантирующий определенную выдержку между соседними посылками. Старт-бит следующего байта может посылаться в любой момент времени после окончания стоп-бита, т.е. между передачами возможны паузы произвольной длительности. Старт-бит имеет всегда строго определенное значение логической 1 и обеспечивает простой механизм синхронизации приемника по сигналу от передатчика. Подразумевается, что и приемник и передатчик работают на одной скорости обмена, измеряемой в количестве передаваемых бит в секунду. Внутренний генератор синхронизации приемника использует счетчик-делитель опорной частоты, обнуляемый в момент приема старт-бита, и генерирует внутренние стробы, по которым приемник фиксирует последующие принимаемые биты. В идеале, эти стробы располагаются в середине битовых интервалов, что обеспечивает возможность приема битов и при некотором рассогласовании скоростей приемника и передатчика. Нетрудно просчитать, что при передаче 8 бит данных, контрольного и одного стоп-бита предельное рассогласование скоростей не может превышать 5%, но с учетом фазовых искажений (затянутых фронтов сигналов) допустимое отклонение скоростей значительно меньше, так что с ростом частоты обмена повышаются и требования к согласованности скоростей и частот работы приемников и передатчиков.
Приемник, получив сигнал о начале передачи, отвечает передатчику своим состоянием и, если приемник готов к приему, передатчик выдает старт-бит, приемник запускает свой генератор тактов и принимает, с этой частотой, байт данных. Естественно, частоты генераторов передатчика и приемника должны быть довольно строго одинаковыми, но скоростные характеристики линии передачи могут быть разными, в разных конфигурациях АПС, поэтому и частоты передач, определяемые контроллером порта, должны допускать разные значения. Эти значения стандартизованы, и в каждом сеансе связи, перед началом передачи первого байта, передатчик сообщает приемнику – на какой из стандартных частот, будет вестись данный сеанс связи.
Для асинхронного режима передачи принят ряд стандартных скоростей обмена: 50, 75, 110, 150, 300,600,1200, 2400, 4800, 9600, 19200, 38400, 57600, и 115200 бит/сек (не путать с Бод).
Бод – это единица измерения пропускной способности линии связи и приемо-передатчиков, выраженная в количестве переключений состояния линии в секунду, что характерно для недвоичного способа кодирования, а при двоичном способе передачи количество бод и бит/сек, могут отличаться в несколько раз. Так, за одну модуляцию (изменение состояния линии) при недвоичном кодировании, например, ДОФМ широко применяемом в современных модемах, может передаваться несколько бит, а при двоичной асинхронной передаче через СОМ-порты, за одну посылку передается 8 информационных бит, но, с учетом стартовых стоповых бит и бита паритета – до 13 бод.
Асинхронный способ обмена в РС реализуется СОМ-портом с использованием протокола RS232C.
Синхронный режим передачи предполагает постоянную активность канала связи. Посылка начинается с синхробайта, за которым следует поток информационных бит, а если у передатчика нет данных для передачи, то он заполняет паузу непрерывной посылкой байтов синхронизации. При передаче больших массивов информации, такой режим целесообразнее асинхронного, но в синхронном режиме необходима постоянная внешняя синхронизация приемника с передатчиком, т.к. даже небольшое отклонение их частот очень быстро приведет к накапливающейся ошибке и, следовательно, к искажению принимаемых данных. Внешняя синхронизация возможна либо с применением отдельной линии для передачи синхросигналов, либо с использованием самосинхронизирующего кодирования, например, манчестерского кода или кода NRZ, из которого на приемной стороне могут быть выделены синхросигналы. В любом случае, синхронный режим требует либо дорогих линий связи, либо дорогого оконечного оборудования, а может – и того, и другого.
На физическом уровне последовательный интерфейс может иметь различные модификации, различающиеся способами передачи электрических сигналов. Существует ряд международных стандартов RS232C, RS423A, RS422A и RS485. Первый использует простые приемо-передатчики, одиночные провода для каждой из линий связи и допускает связь со скоростями до 20 Кбит/сек, на расстояния до
15 м. Другие – передачу парафазными сигналами до скоростей 10 Мбит/сек, на расстояния до 1200м Допустимые скорости передач, в зависимости от расстояний связи и используемого стандарта, приведены в таблице 1.12.
Таблица 1.12. Максимальные длины линий и скоростей передачи по СОМ-портам.
| RS232C | RS423A | RS422A | RS485 | ||||
| Длина линии (м) | Скорость передачи | Длина линии (м) | Скорость передачи | Длина линии (м) | Скорость передачи | Длина линии (м) | Скорость передачи |
| 15 | 20 Кбит/сек | 9 | 100Кбит/сек | 12 | 10 Мбит/сек | 12 | 10 Мбит/сек |
| - | - | 90 | 10 Кбит/сек | 120 | 1 Мбит/сек | 120 | 1 Мбит/сек |
| - | - | 1200 | 1 Кбит/сек | 1200 | 100 Кбит/сек | 1200 | 100 Кбит/сек |
Интерфейс RS232C.
Интерфейс RS-232C предназначен для подключения аппаратуры, передающей или принимающей данные (ООД – оконечное оборудование данных, или АПД – аппаратуры передачи данных) к оконечной аппаратуре каналов данных (АКД). В роли АПД может выступать компьютер, принтер, плоттер и другое периферийное оборудование. Этой аппаратуре соответствует аббревиатура DTE (Data Terminal Equipment). В роли АКД часто выступает модем, этой аппаратуре соответствует аббревиатура DCE (Data Communication Equipment). Конечной целью подключения является соединение двух устройств DTE.
Стандарт описывает:
- управляющие сигналы интерфейса,
- электрический интерфейс и
- типы разъемов.
Стандарт же определяет асинхронный или синхронный режимы обмена, но СОМ-порты компьютера поддерживают только асинхронный режим. Функционально RS232С эквивалентен стандарту МККТТ V.24/V.28 и стыку С2, но они имеют различные названия одних и тех же используемых сигналов.
Стандарт RS232C использует несимметричные передатчики и приемники. Сигнал передается относительно общего провода (“схемной земли”) и не обеспечивает гальванической развязки устройств. Логической единице соответствует уровень напряжения на входе приемника от –12 вольт до –3 вольт, логическому нулю соответствует напряжение на входе приемника от +3 вольт до +12 вольт. Между уровнями –3 и +3 вольт имеется зона нечувствительности, обуславливающая гистерезис приемника. Уровни сигналов на выходах передатчиков должны быть в диапазонах от –12 вольт до –5 вольт и от +5вольт до +12 вольт, соответственно. Разность потенциалов между “схемными землями” (SC) соединяемых устройств не должна превышать двух вольт, иначе возможно неверное восприятие приемником сигналов передатчика. Интерфейс предполагает наличие защитного заземления соединяемых устройств, если они оба питаются от сети переменного тока и имеют сетевые фильтры.
Преобразование параллельного кода, получаемого СОМ-портом от системной шины, в последовательный код для передачи по каналу, и обратное преобразование при приеме данных от терминала, выполняют специализированные контроллеры порта – микросхемы UART (Universal Asynchronous Receiver-Transmitter – универсальный асинхронный приемо-передатчик). Эта же микросхема формирует и обрабатывает сигналы интерфейса. СОМ-порты IBM PC XT/AT базируются на микросхемах UART i8250, 16450, 16550A.
Регламентируются и типы применяемых разъемов. На аппаартуре DTE, в том числе и на СОМ-портах следует устанавливать вилки (male) DB9P или DB25P, а на аппаратуре DCE (модемах) устанавливаются розетки (female) DB9S или DB25S.
Назначение и распределение сигналов интерфейса RS232C по разъемам СОМ-порта приведено в таблице 1.13.
Таблица 1.13. Назначение сигналов интерфейса RS232C.
| Сигнал | DB9S | DB25S | Назначение сигнала |
| PG | Защитная земля. Соединяется с корпусом устройства и экраном кабеля. | ||
| SG | 5 | 7 | Сигнальная (схемная) земля, относительно которой действуют уровни сигналов. |
| TD | 3 | 2 | Выход передатчика, последовательные данные. |
| RD | 2 | 3 | Вход приемника, последовательные данные. |
| RTS | 7 | 4 | Выход запроса передачи данных. Состояние лог.1 сообщает модему, что у терминала есть данные для передачи. |
| CTS | 8 | 5 | Вход разрешения (лог. 1) терминалу передавать данные. |
| DTR | 4 | 20 | Выход сигнала готовности терминала к обмену данными. Состояние лог. 1 поддерживает канал в состоянии соединения. |
| DSR | 6 | 6 | Вход сигнала готовности АПД (например, модема). |
| DCD | 1 | 8 | Вход сигнала обнаружения несущей удаленного терминала. |
| RI | 9 | 22 | Вход индикатора вызова (звонка). |
Интерфейс позволяет исключить канал удаленной связи вместе с парой модемов, соединив два интеллектуальных устройства DTE непосредственно, с помощью нуль-модемного кабеля.
При соединении аппаратуры DTE без модемов, разъемы устройств соединяются между собой полным или минимальным нуль-модемным кабелем (Zero-modem, Z-modem).
Полный нуль-модемный кабель выполняется семижильным жгутом проводов, причем контакты DSR – DCD закорачиваются на каждом из разъемов кабеля, а для минимального нуль-модема достаточно всего трехжильного жгута. В последнем случае закорачиваются на каждом из разъемов кабеля контакты DTR - DSR - DCD, а так же RTS - CTS.
Питание ВУ от интерфейса RS-232C.
При подключении мыши или трекбола к СОМ-порту, они обычно получают питание +V от линий DTR и RTS, a –V – от TD, не используемых по прямому назначению. Так если исправная мышь с данным портом не работает, то нужно проверить уровни потенциалов на контактах разъема порта с этими сигналами. При инициализации порта, линии DTR и RTS переходят в состояние логического нуля, т.е. вырабатывают напряжение порядка +12 вольт, а линия TD – порядка –12 вольт. Потенциалами на этих линиях можно управлять через регистры СОМ-порта, что и делают соответствующие драйверы мыши и трекбола. Если потенциалы после их установки не соответствуют требуемым, то неисправность может быть и в регистрах порта, что легко проверяется (конечно, с отключенным манипулятором) тест-программой в режиме тестирования с внешней заглушкой.
Порт получает питание от блока питания через системную плату, и отсутствие напряжения +12 вольт сразу обнаруживается по неработоспособности дисков компьютера, а отсутствие напряжения –12 вольт могут заметить только устройства, подключенные к СОМ-портам. Не все блоки питания контролируют все выходные напряжения, поэтому неработоспособность терминальных устройств, подключенных к СОМ-порту, может быть и следствием неисправности блока питания компьютера.
Инфракрасный интерфейс.
Применение излучателей и приемников инфракрасного (ИК) диапазона позволяет осуществлять беспроводную коммуникацию между парой устройств, удаленных на расстояние метра, а иногда и нескольких метров. Различают ИК-системы связи с низкой (до 115 Кбит/сек), средней (1.152 Мбит/сек) и высокой (4 Мбит/сек) скоростями связи. В перспективе ожидаются и более высокие скорости обмена, которые позволят передавать даже «живое видео».
На скоростях 115 Кбит/сек для ИК-связи используются UART, совместимые с 16450/16550 и часто может конфигурироваться порт СОМ-2. Весьма привлекательно применение ИК-технологии для связи портативных компьютеров со стационарными, или док-станциями (PC Docking), расширяющими их до полноценной настольной конфигурации.
Интерфейс MIDI.
Цифровой интерфейс музыкальных инструментов MIDI (Musical Instrument Digital Interface) представляет собой асинхронный интерфейс с частотой передачи 31,25 Кбит/сек. В интерфейсе применяется связь типа токовая петля 10мА с гальванической (оптронной) развязкой входной цепи.
Формат асинхронной посылки содержит старт-бит, 8 бит информации и стоп-бит, контроль четности отсутствует. Интерфейс поддерживается стандартными 5-контактными разъемами DIN и позволяет объединить группу, последовательно до 16 устройств, в локальную сеть.
В РС MIDI-порт имеется на большинстве плат звуковых адаптеров, и его сигналы выведены на неиспользуемые 12 и 15 контакты разъема Game-адаптера. Для MIDI-порта применяются ИМС UART, совместимые с MPU401, отличающиеся от обычных UART 8250 или 8251 тем, что имеют дополнительный регистр устройства. На некоторых системных платах применяются БИС контроллеров интерфейсов, в которых UART, используемый для СОМ-портов, может быть переведен в режим MIDI-порта его конфигурированием через BIOS SetUp,
Контрольные вопросы.
1. Какие режим работы может поддерживать СОМ-порт?
2. Какой стандарт поддерживает работу СОМ-порта?
3. Как зависит максимальная скорость передачи через СОМ-порт от длины кабеля связи?
4. Какие типы разъемов используют СОМ-порты?
5. Что такое нуль-модем и как он устроен?
6. Какие меры необходимо принимать для безопасности оборудования СОМ-портов при соединении через них разных устройств?
7. В чем состоят достоинства ИК-интерфейса?
8. В чем состоят достоинства ИК-интерфейса?
1.5.3.2) Сетевые средства связи
Локальные вычислительные сети ЛВС (LAN – Local Area Network) позволяют объединять компьютеры, расположенные в некотором ограниченном пространстве. Для локальных сетей прокладывается специализированная кабельная система, и положение возможных точек подключения абонентов ограничивается этой кабельной системой. Локальные сети можно объединять в крупномасштабные образования – CAN (Campus Area Network – кампусная сеть, объединяющая группу близко расположенных зданий), MAN (Metropolitan Area Network – сеть городского масштаба), WAN (Wide Area Network – широкомасштабная сеть), GAN (Global Area Network – глобальная сеть). Оборудование локальных сетей подразделяется на активное (интерфейсные карты компьютеров, концентраторы и т. п.) и пассивное (кабели, соединительные разъемы, коммутационные панели и т.д.).
Самой популярной является на сегодня сетевая технология Ethernet, представляющая архитектуру сетей с разделяемой средой и широковещательной передачей. Для связи по сети, в компьютер устанавливаются сетевые карты. Сетевые карты-адаптеры (Network Interface Card – NIC) выпускаются для шин ISA, EISA, MCA, PCI, PC Card, VLB. Существуют также сетевые адаптеры, подключаемые к стандартному LPT-порту. Их преимущество состоит в отсутствии потребностей в специальных системных ресурсах (порты, прерывания и т.п.) и в легкости подключения (не требуется вскрытие системного блока). Крупным недостатком сетевых LPT-адаптеров является то, что скорости обмена данными через них ограничиваются скоростными характеристиками LPT-порта и они значительно загружают процессор.
Основные свойства сетевых адаптеров:
1) разъемы подключения к среде передачи: один разъем BNC или RJ-45 (UTP или STP), или их комбинация. Наиболее универсальные “Combo” – имеют полный 10-мегабитный набор BNC/AUI/RJ45;
2) скорость передачи – 10 или 100 Мбит/сек; многие 100-мегабитные адаптеры имеют и режим 10 Мбит/сек;
3) системная шина и способ обмена данными. Для многозадачных применений желательно использование Bus-Master, разгружающего процессор. Адаптеры Bus-Master должны иметь 32-разрядную шину (EISA, MCA, PCI), в противном случае будут проблемы с использованием ОЗУ свыше 16 МБ;
4) возможность полного дуплекса, для сред с раздельными линиями приемника и передатчика, в многозадачных системах позволяет теоретически удвоить пропускную способность, при поддержке этого режима на другой стороне;
5) размер установленной буферной памяти – чем больше, тем лучше. Минимальный ее объем должен позволять хранить, по крайней мере, пару пакетов (максимальная длина пакета – 1514 байт). Сейчас есть платы и с объемом буферной памяти, исчисляемой мегабайтами;
6) наличие на NIC гнезда для микросхемы BootROM, обеспечивающей возможность удаленной загрузки операционной системы (Remote Boot или Remote Reset) по сети, с файл-сервера.
Контрольные вопросы.
1. Что такое LAN?
2. Как расшифровывается аббревиатура NIC?
3. Каковы достоинства и недостатки сетевых адаптеров, подключаемых к стандартному LPT-порту?
4. Какие скорости передачи данных могут поддерживать сетевые адаптеры
5. Какой минимальный объем буферной памяти должна иметь сетевая карта?
6. Для чего используются микросхемы BootROM на сетевых картах?
1.5.4 Средства вывода аудиоинформации
Потребность в выводе аудиоинформации из РС определилась на самых ранних этапах внедрения компьютеров. Так, требуется сообщать пользователю, не всегда глядящему на экран дисплея, о нормальном завершении POST-программы, или об ошибках, выявленных POST-программой, если вывести их на экран невозможно (неисправна видеоподсистема), наконец, о появлении фатальных ошибок при работе прикладных программ.
1.5.4.1) Вывод звука на встроенный динамик
Компьютер часто оснащается небольшим излучателем звука – динамическим громкоговорителем. Звуки, выводимые на динамик, формируются аппаратными и программными средствами: – интервальным таймером и активной в данный момент программой. Так, выбирая программно соответствующий выход и режим интервального таймера, можно задавать высоту тона, длительность звучания и пауз между воспроизводимыми нотами.
Проверить работоспособность аудио-канала РС можно просто, выбрав в тест-программе NDiags пункт меню ПРОЧИЕ/Тест динамика. При этом на встроенный динамик должны быть выведены несколько фраз, или звуков. Хотя, если короткий звук с частотой 1 КГц перед загрузкой DOS выдался, значит, аудио-канал в порядке. Если звуки не издаются, нужно проверить подключен ли, и правильно ли, разъем от динамика к системной плате. Если динамик подключен правильно, то, при таких симптомах, может быть неисправен или сам динамик, или шлейф его подключения, или интервальный таймер. Для уточнения места неисправности можно отключить от системной платы разъем подключения динамика и тестером прозвонить сам шлейф и динамик. Сопротивление исправного динамика должно быть порядка нескольких Ом. Если динамик в порядке, то для проверки работы канала интервального таймера нужно запустить тест динамика, например, из той же тест-программы NDiags и в это время осциллографом наблюдать осциллограмму, появляющуюся на выходе канала Т1 интервального таймера.
1.5.4.2) Вывод звука на акустические системы
Для воспроизведения полноценной звуковой информации – музыки, речи и т.д., в компьютере должна быть установлена звуковая карта и к ней подключены акустические системы (колонки).
Звук, это воспринимаемые человеческим ухом колебания воздуха с частотами от 16 Гц до 20 Кгц, формируются и воспроизводятся в компьютерах специальными программами с помощью звуковых карт-адаптеров и акустических систем.
Имеется множество модификаций звуковых карт, но основные функции, выполняемые звуковыми картами, это – ввод и оцифровка аналоговой звуковой информации с микрофона, магнитофона, радио, проигрывателя компакт-дисков и т.п. источников, и – обратное преобразование и воспроизведение уже оцифрованных записей, хранящихся в компьютере.
Для преобразования входного аналогового электрического сигнала в цифровую форму, АЦП звуковой карты измеряет амплитуду этого сигнала через равные, малые промежутки времени. Частота этих измерений называется частотой дискретизации Согласно теореме Котельникова, для полного восстановления в последующем огибающей звукового колебания, частота дискретизации должна не менее чем вдвое превышать максимальную частоту этих звуковых колебаний. Т.к. максимальная частота звука, воспринимаемая ухом человека – 20 КГц, то частота дискретизации должна быть не менее 40 КГц. Чаще используется частота дискретизации 44,1 КГц (именно эта частота используется и в компьютерных звуковых картах, и для записи звука на компакт-диски). Амплитуда каждой точки дискретизации обычно измеряется 16-битовым АЦП, что позволяет иметь 216 значений амплитуды. Результаты оцифровки звука передаются соответствующей программе и, после сжатия, в виде файлов записываются на жесткий диск (файлы с записью звука имеют в Windows расширения .wav). Эти файлы, несмотря на сжатие, имеют очень большой объем – десятки Кбайт на каждую секунду звучания. При большой степени сжатия объемы таких файлов уменьшаются, но это неизбежно приводит к потере качества воспроизведения записанного звука.
Воспроизведение цифровой информации происходит обратными процедурами: считывание сжатой цифровой информации, ее распаковка и преобразование, с использованием ЦАП звуковой карты, в аналоговый сигнал, который после усиления по мощности поступает на звуковые колонки, где он и превращается в звуковые колебания воздуха (акустический звук).
Различные звуковые карты отличаются друг от друга по следующим характеристикам:
1) максимальной частоте выборки (сэмплинг) (sample rate) при оцифровке звука. Чем выше сэмплинг, тем выше качество воспроизводимого звука. Обычно, частота выборки – 44,1 КГц и выше (как на СD-дисках), но некоторые карты используют частоту 48 КГц (как в цифровых магнитофонах). Старые звуковые карты использовали частоту дискретизации 22,05 КГц, т.е. звуки с частотой выше 10КГц вообще не воспроизводились;
2) максимальной частоте дискретизации при записи. Эти частоты соответствуют частотам выборки для каждого из типов карт;
3) максимальной разрядности АЦ-преобразования звука при записи. Большинство современных карт поддерживает 26- и 8-разрядную дискретизацию, а старые карты поддерживали только 8-разрядную, которая годится только для записи речи;
4) возможности стерео воспроизведения. Многие старые карты таких возможностей или не обеспечивают, либо обеспечивают ограниченно (например, при воспроизведении монозаписи обеспечивается частота дискретизации 44,1 КГц, а при стереозаписи – только 22,05 КГц).
5) формированию шестиканальной квази-стереофонии.
Подключение звуковых карт.
Большинство звуковых карт вставляется в разъем шины ISA, и на задней стенке карты могут иметь разъемы:
- 15-контактный разъем для подключения MIDI-инструментов или джойстика;
- 2 – 3 входных разъема типа «мини-джек» для линейного входа от магнитофона, CD-плеера и т. п.;
- входной разъем для подключения микрофона;
- 1 или 2 выходных разъема, один – для линейного выхода на внешний усилитель, другой, от встроенного усилителя, – для подключения пассивной аудио-системы.
Подключение дисковода CD-ROM через звуковую карту.
Внутренний CD-дисковод может подключаться к звуковой карте специальным 3-х или 4-х-проводным аудио-кабелем, что позволяет проигрывать компакт-диски практически без участия микропроцессора. Многие из современных звуковых карт не имеют разъема для подключения CD-дисковода, т.к. современные компьютеры оснащаются контроллерами EIDE, к которым и подключаются CD-дисководы.
Дополнительные функции.
Некоторые звуковые карты имеют дополнительные возможности обработки звука, добавляя в него определенные эффекты – хорус, реверберацию, квази-трехмерное звучание и т.д.
Аналоговый сигнальный процессор (ASP) применяется в некоторых картах Creative Labs для распознавания речи.
Радиотюнер – позволяет прослушивание радиопрограмм.
Режим Dual DMA – позволяет одновременно производить и запись, и воспроизведение звука.
Контрольные вопросы.
1. Как проще всего проверить работоспособность встроенного динамика в РС?
2. Какой принцип оцифровки звука используется в РС?
3. Какой должна быть минимальная частота дискретизации для звуковых частот до 20 Кгц?
4. Сколько уровней квантования звуковых сигналов имеют современные звуковые карты?
5. Какие есть два способа подключения CD-дисковода к звуковой карте?
Раздел 2 Средства и методы диагностики АПС
2.1 Классификация неисправностей АПС
Для выбора метода диагностики и определения первичных и вторичных симптомов отказа необходимо уметь классифицировать неисправность, т. к. первичный отказ часто вызывает целый спектр отказов вторичных, являющихся следствием первичного и затеняющих причину неисправности.
Предлагаемая классификация охватывает ошибки и отказы, вызванные электронными узлами системной платы, как наиболее сложной части РС, и может быть распространена на весь клон IBM PC.
С позиции аппаратных и программных средств, используемых в РС, неисправности подразделяются на аппаратные, программные и аппаратно-программные.
Аппаратные неисправности, т. е. неисправности аппаратных средств, в свою очередь, подразделяются на случайные, мягкие и жесткие ошибки.
К случайным ошибкам относят:
1) плавающие ошибки;
2) корректируемые отказы;
3) некорректируемые отказы (технические остановы).
Потенциально, любая неисправность, связанная со случайными ошибками, может привести к жесткой ошибке. Случайная ошибка, приобретшая фактор стабильности и делающая невозможной дальнейшую эксплуатацию системы классифицируется как жесткая, не корректируемая и требует анализа и диагностики неисправности АПС. Нередко, после коррекции условий эксплуатации ВС (температурно-климатические, вибрационные и т. д.), такие ошибки исчезают, но, по истечении некоторого времени, появляются снова. Таким образом, это – не метод устранения ошибок, и задача инженера или техника по ТО – наоборот, ужесточить условия эксплуатации ВС на время диагностики, с целью выявления ошибки и выделения отказавшего узла. Наиболее неприятны отказы, связанные с факторами нестабильности и неопределенности – плавающие ошибки. Их появление часто связано:
1) с наличием мощных источников электромагнитного излучения, таких как:
- сварочное оборудование;
- силовые контакторы;
- щеточные электродвигатели;
- электродуговые приборы;
- СВЧ медицинское оборудование;
- рекламная светотехническая аппаратура и т. п.;
2) с повреждением или ухудшением параметров контуров защитного заземления. "Схемная земля" (или "логическая земля"), объединяет по общему проводу несколько ПЭВМ, и если их нулевые потенциалы сильно отличаются, то это приводит к заметной разности потенциалов между ними и образованию паразитных токов в контуре: схемная земля – защитное заземление;
3) с наличием источников механических колебаний, кинематических перемещений, что, кроме опасных для НЖМД ускорений, может быть причиной нарушений электрических соединений в разъемах питания, слотах расширения, панельках для установки ИМС (Chip Sockets) и т. п.;
4) с запыленностью помещений, наличием агрессивной внешней среды, что вызывает загрязнение и окисление контактов разъемных соединений;
5) с разношенностью или загрязненностью сетевых розеток и вилок подключения СВТ к сети первичного питания;
6) с перепадами температур, которые всегда отрицательно влияют на все компоненты ПЭВМ;
7) появление неисправностей часто возникает после окончания профилактики или модернизации системы. Причина подобных неисправностей может заключаться в неправильном, невнимательном или непрофессиональном выполнении этих работ.
К мягким ошибкам (Minor Errors) относятся ошибки, устраняемые аппаратно, аппаратно-программно или программно, самой ВС без вмешательства оператора. Например:
1) ошибки информации в DRAM, корректируемые по коду Хемминга;
2) ошибки чтения секторов диска, исправляемые кодами ECC (Errors Checking and Correcting Code), исправляющими ошибки, или повторным считыванием сбойного сектора;
3) ошибки передачи данных по каналам связи, исправляемые при повторных сеансах передачи
и т. п.
К жестким ошибкам (Major Errors) относятся ошибки оборудования, приводящие к устойчивому отказу с потерей всех или некоторых функций ВС, устранение которых является задачей специалистов по ТО и СТО (системотехническому обслуживанию) СВТ.
1. К аппаратным неисправностям, т. е. неисправностям аппаратных средств, относятся, например, следующие:
1) неисправности энергоснабжения в РС;
2) отказы компонент локальной шины;
3) отказы буферов шин каналов адреса и данных;
4) отказы узлов подсистемы DRAM и кэш-памяти;
5) отказы карт расширения подсистем ввода-вывода;
6) отказы компонент узлов обрамления (обвески) CPU;
7) отказы узлов подсистемы ROM BIOS;
8) отказы компонент клавиатуры;
9) отказы узлов и элементов аудиосистемы;
10) отказы узлов расширения подсистем, расположенных на системной плате и т. д.
2. К программным ошибкам относятся:
1) ошибки, связанные с загрузкой операционной системы;
2) ошибки прогона пользовательских программных средств (Soft Ware);
3) ошибки, вызванные вирусными заражениями памяти компьютера.
3. К аппаратно-программным ошибкам относятся:
1) потеря или искажение информации в ROM BIOS, приводящие к нарушениям функций обслуживания средств ввода-вывода;
2) потеря или искажение информации в CMOS-памяти, приводящие к искажениям информации о текущей аппаратной конфигурации ВС;
3) потеря или искажение информации в регистрах портов подсистем ввода-вывода, приводящие к нарушениям интерфейса ввода-вывода;
4) некорректная установка средств конфигурации системы, приводящая к потере обслуживания или опознавания компонент ВС (не тот тип дисковода, монитора, клавиатуры, FPU и т .д.)
Контрольные вопросы.
1. Какие ошибки относятся к аппаратным?
2. Какие ошибки относятся к программным?
3. Какие ошибки относятся к аппаратно-программным?
4. Какие ошибки классифицируются как мягкие?
5. Какие ошибки классифицируются как жесткие?
6. С какими факторами связано возникновение плавающих ошибок?
2.2 Этапы и процесс устранения неисправностей РС
Ремонт ПЭВМ, в общем случае, заключается:
1) в анализе симптомов отказа;
2) в предварительном тестировании;
3) в сокращении аппаратной и программной конфигурации ВС, для выделения отказавшего устройства;
4) в углубленной диагностике неисправного устройства, для локализации места возникновения неисправности, до узла или компоненты схемы;
5) в замене отказавшего узла, компоненты, или восстановлении работоспособности схемы устранением дефекта в монтаже, разъемном соединении и т. д.
Таким образом, ремонт ВС более чем на 9/10 состоит из диагностики АПС и состоит из пяти этапов:
1) анализ ситуации отказа;
2) тестирование;
3) ремонт;
4) тестирование после ремонта;
5) восстановление рабочей конфигурации и проверка функционирования.
При выполнении работы по диагностике неисправностей рекомендуется:
1) подробно документировать работу;
2) предположить одну из похожих по симптомам неисправность (идентифицировать неисправность);
3) выделить неисправное устройство (интерпретировать вид ошибки);
4) воспользоваться,если возможно, эталонной таблицей состояний ВС;
5) выделить неисправную компоненту в устройстве;
6) если симптомов несколько, – классифицировать их на первичные и вторичные (зависимые от первичных).
Процесс поиска неисправностей.
На этапе анализа ситуации следует:
1. проанализировать, в каком режиме работы АПС, при выполнении какой программы и в каком месте программы произошел отказ;
2. зафиксировать симптомы неисправности:
1) состояние индикаторов РС,
2) сообщения программы (диспетчера, ОС, оболочек и т. д.),
3) звуковые сигналы, штатные и нештатные;
3. попытаться перезапустить программу;
4. перезагрузить систему ("теплый" рестарт, или "холодный" старт);
5. внимательно просмотреть, как проходят рестарт, POST-контроль;
6. проверить параметры АПС в CMOS-памяти, с помощью процедур SETUP;
7. выключить ВС, проверить качество соединений кабелей интерфейсов, подключения питания, температурный режим всех ИМС (наощупь), степень загрязненности плат;
8. если POST-программа не выполняется, перейти к локализации компоненты, используя видео- или аудио-коды, сообщаемыми POST-программой;
9. если POST-программа выполняется, – перейти к тестовой диагностике ВС;
Эффективный поиск неисправностей в оборудовании СВТ требует дедуктивного метода рассуждений для выделения главной проблемы.
Проводя анализ ситуации, нужно постараться понять:
1) причину неисправности и ее тип;
2) связать причину неисправности с первичной компонентой ВС, вызывающей подобный тип неисправностей;
3) провести анализ работы выделенного узла, используя его функциональную схему;
4) предположить вероятный источник ошибки;
5) записать расположение карт контроллеров в слотах, схему подключения кабелей, положение перемычек и переключателей на контроллерах, картах расширения и системной плате;
6) проверить, не возникла ли неисправность после:
- установки другого контроллера в слот расширения (реконфигурация ВС);
- подключения к контроллеру дополнительного периферийного устройства;
- переустановки конфигурации периферийных устройств на контроллерах, периферийных устройствах, системной плате.
Если ошибка возникла вследствие реконфигурации АПС, то следует проверить правомерность проведенных подключений и переустановок, пользуясь руководством пользователя (User Manual) контроллера, периферийного устройства, системной платы.
При возможности, полезно сравнить установки и подключения таких же устройств на другой, аналогичной АПС.
Если все было подключено верно, – вернуть ВС в исходное состояние: выключить только что установленное ПУ и/или контроллер и вновь проверить работоспособность ВС.
Если ошибка осталась, значит, компонента определена неверно, и нужно повторить анализ по пунктам 1) – 4).
Если ошибка устранилась, следует по-очереди заменять элементы узла на заведомо исправные в следующем порядке:
- периферийное оборудование, относящееся к выделенной подсистеме (дисковая, VIDEO, коммуникации, манипуляторы и т. д.), обращая внимание на их конфигурирование;
- кабельные соединения (не спутать подключение шлейфов: выделенная цветом жила плоского шлейфа подключается к первому контакту разъема);
- контроллер, обращая внимание на установленную конфигурацию соответственно типу, объему буферной памяти и т. д. принтера, манипулятора, дисковода и т. п.
Если ошибка осталась, значит, дело не в аппаратной, а в программной конфигурации:
- драйвер не соответствует данному конкретному устройству;
- конфликт драйверов;
- конфликт запросов прерываний;
- пересечение областей векторов прерываний в DRAM
и следует тщательно проверять программную конфигурацию РС при вводе нового оборудования. При обнаружении несоответствия – откорректировать программную конфигурацию АПС.
На этапе тестирования нужно выполнить:
1. запуск тест-программы, наиболее подходящей по составу и возможностям, к выделенному устройству или компоненте АПС;
2. уточнить место возникновения ПЕРВИЧНОЙ неисправности;
3. для определения характера первичной ошибки, провести углубленную диагностику выделенной компоненты, подсистемы, устройства;
4. разобраться в логике работы неисправного узла;
5. подготовить программный материал для углубленной, детальной проверки неисправного узла:
1) подобрать программу углубленного тестирования;
2) выделить необходимый фрагмент программы для его тестирования;
3) написать пример программы, выделяющий данную неисправность (можно использовать отладочную программу DEBUGGER, позволяющую программировать на языке АССЕМБЛЕРА) и проверять его прохождение, трассировку и т. д.);
6. исключить из работы по диагностике все устройства, узлы, компоненты, не участвующие в работе тестируемого узла;
7. запустить подготовленную программу, или пример работы данного узла;
8. проверять работу узла ПО КОМПОНЕНТАМ, используя необходимую КИА и КИП (логический пробник, тестер, осциллограф, логический анализатор и т. д.);
9. выделить неисправную компоненту узла (ИМС, ЭРЭ и т. п.);
10. определить причину возникновения неисправности;
11. принять решение по способу устранения неисправности:
1) замена ИМС, ЭРЭ и т. д.;
2) восстановление контакта;
3) восстановление схемы соединений и т. п.
На этапе РЕМОНТА выполняется собственно ремонт выделенного узла, с соблюдением всех требований персональной электробезопасности и безопасности ремонтируемой аппаратуры (отключение РС от сети питания, извлечение узла из конструктива, работа низковольтным паяльником с заземленным жалом, принятие средств защиты аппаратуры от статического электричества и т. д.).
На этапе ПРОВЕРКИ ПОСЛЕ РЕМОНТА нужно:
1. визуально просмотреть отремонтированный узел на отсутствие механических повреждений компонент;
2. просмотреть под лупой отсутствие замыканий (перемычек из припоя) между выводами заменявшейся компоненты и обрывов печатных проводников вблизи места ремонта;
3. низковольтным тестером или мультиметром проверить отсутствие замыканий по питанию отремонтированного узла (применять тестер с напряжением более 1,5 вольт опасно для ИМС);
4. поставить отремонтированный узел на место в систему;
5. запустить программу проверки работы данного узла (как на этапе тестирования).
На этапе ВОССТАНОВЛЕНИЯ РАБОЧЕЙ КОНФИГУРАЦИИ нужно:
1. восстановить, нарушенную на втором этапе, исходную аппаратную конфигурацию АПС;
2. прогнать тест-программу проверки-диагностики отремонтированного устройства;
3. протестировать АПС, прогоном тест-программ в целом, вместе с периферией;
4. запустить контрольное выполнение рабочей программы в том режиме, в котором была обнаружена неисправность;
5. подробно записать в журнале Технического обслуживания:
- когда и кем был обнаружен дефект;
- внешнее проявление дефекта, в каком режиме работы АПС он проявляется;
- кем и какие меры были приняты для его устранения;
- результаты ремонта, кем и когда он был выполнен;
6. сделать отметку о ремонте в формуляре и сдать АПС пользователю.
Контрольные вопросы.
1. Из каких пяти этапов состоит в общем случае ремонт СВТ?
2. Из каких этапов состоит диагностика неисправностей АПС?
3. Каков порядок действий на этапе анализа ситуации отказа?
4. Каким должен быть порядок действий на этапе тестирования АПС при отказе?
5. Каким должен быть порядок действий на этапе проверки ВС после ремонта?
6. Каков порядок действий на этапе восстановления рабочей конфигурации ВС?
2.3 Конструкция, разборка и сборка РС клонов IBM
2.3.1 Конструктивное оформление РС
В конце 70-х – начале 80-х годов разобрать компьютер было сложно: фирмы-изготовители пломбировали корпус, и нарушение пломб снимало гарантию изготовителя. Но, с появлением в 1981 году IBM PC, производители позволили пользователю открытый доступ к компонентам компьютера, что, с появлением открытой архитектуры РС, позволяет пользователю самостоятельно проводить не только простые профилактические и ремонтные работы, но и модифицировать, совершенствовать, модернизировать конфигурацию РС в соответствии с потребностями пользователя.
В первых компьютерах все компоненты размещались на одной плате. Для компьютеров с 64- или 128 Кбайт памяти и 8-битовым CPU, объединенная плата с 40 – 50-ю ИМС, была хорошим решением, но с появлением 16- и 32-битовых CPU и компьютеров с памятью 1 Мбайт и более, на плате пришлось бы размещать сотни ИМС, что технологически непросто. С переходом к открытой архитектуре IBM PC/XT, на системной плате появились слоты с разъемами расширения системной шины. На системной плате стали размещать только CPU с его обрамлением, ОЗУ, ПЗУ, CMOS-память, контроллер KBD, формирователи шин, а остальное оборудование (контроллеры видеоадаптера, дисковой системы, порты ввода-вывода и т. д.) – размещать на дочерних платах (картах), вставляющихся в слоты разъемов расширения системной шины.
Предварительный поиск неисправностей стал простым и точным: дисковые накопители, клавиатура, блок питания стали конструктивно законченными, отдельно подключаемыми устройствами. Когда на системной плате размещены только основные компоненты, при неисправности в одном из устройств, найти неисправную компоненту можно быстро, отключая по-очереди отдельные компоненты, просто вынимая их из слотов расширения.
Некоторые фирмы (Zenith, Kaypro и др.) даже разбили системную плату на несколько отдельных плат, заменяя которые, можно отыскивать неисправные узлы и даже модифицировать саму системную плату. В этом случае, основная плата называется объединительной. Обратной стороной открытой архитектуры является снижение надежности работы ВС, т. к. до 90% отказов связано либо с электромеханическими узлами РС, либо – с нарушением контактов в разъемах. Но качество разъемов – дело их технологии и стоимости, а удобство обслуживания и модернизации, плюс замена, при модернизации компьютера, только части, а не целой системной платы и проще, и дешевле.
Благодаря слотам на SВ и дочерним платам, вставляющимся в эти слоты, ремонт упростился до замены неисправной платы. Ремонтнику требуется только иметь комплект исправных плат. Правда, широкий спектр карт, использующихся в РС, особенно разных фирм изготовителей, далеко не всегда совместимых по архитектуре шины, пользовательским параметрам и т. д., да и на все случаи жизни, – требует уж очень большого ассортимента карт. Тем не менее, имея их и заменив неисправную карту, можно быстро ввести РС в нормальную эксплуатацию, а неисправную плату, карту отремонтировать в хорошо оборудованной мастерской и вновь использовать для замены в будущем.
Контрольные вопросы.
1. Что входит в понятие открытой архитектуры РС?
2. В чем состоит достоинство диагностики и ремонта РС открытой архитектуры?
3. В чем заключается недостаток РС открытой архитектуры?
4. Какой способ диагностики и ремонта РС открытой архитектуры самый простой?
5. В чем состоят недостатки диагностики и ремонта РС методом замены отдельных узлов СВТ?
2.3.2 Разборка и сборка компьютера
Все многообразие конструкций РС можно свести к основным пяти типам:
1) все в одном корпусе (All-On-Oncе) – старые компьютеры с 8-битовым CPU, такие как Apple, Commodore, Atary, Spectrum и т. п.;
2) портативные компьютеры (LapTop, Note-Book и т. п.) со встроенными плоским дисплеем и клавиатурой;
3) РС со встроенным дисплеем на ЭЛТ (TSR-80 моделей I-IV, Macintosh);
4) самые популярные до недавнего времени IBM PC/XT/AT и большинство их клонов, имеют системный блок в прочном корпусе, подключаемые отдельно клавиатуру и монитор, который можно установить на системный блок;
5)системный блок вертикальной конструкции, устанавливаемый на столе (Mini Tower) или на полу (Big Tower), что освобождает место на столе и обеспечивает простой доступ к разъемам слота и платам.
Для разборки и сборки РС нужно иметь конкретное техническое руководство (User Manual) для данного РС. Это сэкономит много времени и позволит избежать ошибок и привнесенных неисправностей.
Инструкция по разборке компьютера, от начала до конца состоит из конечного числа операций, выполняющихся последовательно. Нужно разбирать только то, что требуется для выявления дефекта, или ремонта неисправной компоненты. Более широкий демонтаж – не только пустая трата времени, но и источник новых неисправностей. Так что настоятельно рекомендуется, несмотря на простоту разборки, найти указания по разборке-сборке данного конкретного компьютера в его техническом руководстве или справочной литературе. В литературе можно найти очень подробное описание последовательности разборки и сборки большинства компьютеров, начиная с РС/ХТ/АТ и кончая РS/2 моделей 60 и 80, с правилами доступа ко всем компонентам – от карт в слотах, до блоков питания, дисководов и SВ в целом.
Современная конструкция системного блока проста. Если снять с него крышку корпуса, или боковые стенки откроется доступ к его внутренним компонентам.
В машинах конструкции DeskTop (настольный, с горизонтальным расположением системной платы) нужно отвернуть винты сзади системного блока, а в конструкциях Tower – сзади, или сзади и сбоку, и крышка снимается. На системной плате размещены, и, в большинстве своем – припаяны, элементы вычислителя: CPU, FPU, модули обрамления микропроцессора (Chip-Set). В специальных разъемах SВ, – модули памяти SIMM, DIMM, а в панельках (Chip-Sockets) устанавливаются иногда ИМС ROM BIOS, контроллера клавиатуры (типа 8042), CMOS-памяти. Для ранних моделей РС-286, РС-386 и РС-486 в специальный разъем устанавливался математический сопроцессор, а для некоторых старых моделей РС-286, в Chip-Sockets устанавливался и набор отдельных микросхем оперативной памяти (RAM).
Неприпаиваемые элементы могут сниматься и устанавливаться и без специального инструмента, с помощью небольшой шлицевой отвертки, хотя для облегчения снятия ИМС желательно иметь специальный экстрактор, а для их установки – специальное приспособление. Модули памяти SIMM, DIMM устанавливаются руками в их разъемы под углом, затем поднимаются до вертикального положения и автоматически закрепляются соответствующими защелками. Все остальные компоненты (карты адаптеров расширения) просто устанавливаются в слот расширения системной шины на SВ и закрепляются винтом.
Другие компоненты ВС, такие как дисководы FDD, HDD, CD-ROM, вдвигаются по направляющим в конструктивный блок и фиксируются защелками, либо винтами на боковых сторонах системного блока. Для их снятия и установки иногда требуется снять лицевую панель, либо лицевые накладки, которые закрепляются пружинными фиксаторами.
Контрольные вопросы.
1. Какие основные типы конструкции РС вам известны?
2. Какими документами следует руководствоваться при разборке-сборке компьютера?
3. Как снимаются и устанавливаются модули оперативной памяти в современных РС?
4. Как снять и установить дочерние платы на системную плату?
5. Как устанавливаются жесткие диски и дисководы в системный блок РС?
2.3.3 Инструментарий
Для разборки, демонтажа и сборки РС, в общем случае, понадобятся следующие основные инструментальные средства:
- обыкновенные ручные инструменты (ключи, отвертки, пинцет и т. д.);
- инструментальные средства для отпайки, припайки элементов схемы и монтажа.
2.3.3.1) Ручные инструменты для демонтажа/монтажа
1) 3/16" торцевой ключ;
2) 1/4" торцевой ключ;
3) 3-мм отвертка с крестообразным шлицом;
4) 3-мм шлицевая отвертка с плоским лезвием;
5) 5-мм отвертка с крестообразным шлицом;
6) 5-мм отвертка с плоским лезвием;
7) экстрактор для снятия микросхем с DIP-корпусами;
8) пинцет;
9) держатель элементов типа "клещи";
10) бокорезы-острогубцы;
11) "бархатный" надфиль;
12) маленькие плоскогубцы.
2.3.3.2) Принадлежности пайки-отпайки
Для отпайки и припайки электронных компонент на платах компьютера понадобятся следующие инструментальные средства:
1) маломощный паяльник на 25 Вт 36 вольт (желательно с регулировкой температуры), но обязательно с заземленным жалом.;
2) набор сменных стержней к паяльнику:
- одностороннее жало;
- стержень с внутренним отверстием для пайки ЭРЭ и ИМС с аксиальными выводами;
- кинжалообразное жало для пайки ИМС с планарным выводами;
- групповое жало на 14 и 16 контактов (выпаивание ИМС в DIP-корпусах);
3) медный теплоотвод (пинцет с медными наконечниками);
4) отсос припоя (лучше – паяльник с отсосом припоя);
5) средство очистки отверстий платы от остатков припоя (набор клинообразных палочек);
6) медицинская игла для люмбальной пункции, с тонко заправленным концевым конусом
d = 0,8 мм. Используется для отпаивания выводов резисторов, конденсаторов, полупроводниковых диодов, транзисторов, а также с ее помощью можно отпаивать и ИМС в DIP-корпусах;
7) тонкий стальной крючок. Используется для подъема выводов ИМС при отпайке ИМС с планарными выводами;
8) низкотемпературный припой (ПОС-40, ПОС-65, сплав Розе и т. п.);
9) жидкая канифоль, или другой бескислотный флюс;
10) маленькая художественная кисточка;
11) кисть или щетка с коротким жестким ворсом (для промывки от флюса мест пайки);
12) чистая ветошь;
13) спирт технический, ректификат.
Правила техники безопасности при работе с электрооборудованием, требуют для работе с электронным оборудованием использования паяльников только с безопасным для жизни напряжением питания, не более 36 вольт. Иначе, при аварийном пробое изоляции проводов питания или нагревательного элемента на корпус паяльника, работающий с ним человек, может получить поражение электрическим током.
При пайке электро-радио-элементов (ЭРЭ): резисторов, конденсаторов, и особенно – полупроводниковых приборов: диодов, транзисторов, микросхем и т. п., для их защиты от перегрева требуется отводить тепло от места пайки. С этой целью применяются медные теплоотводы, в простейшем случае, представляющие собой пинцет с достаточно массивными медными наконечниками. При пайке ЭРЭ, этим теплоотводом придерживают отпаиваемый или припаиваемый элемент за вывод, между местом пайки и корпусом элемента.
При замене ЭРЭ, после их выпаивания из платы, отверстия под их выводы часто остаются залитыми остатками припоя, что затрудняет установку на это места нового элемента. Для удаления этих остатков припоя лучше всего использовать паяльник с отсосом, или отдельный отсос припоя. Если под руками нет такого оборудования, проще всего воспользоваться остро заточенными деревянными палочками. Отверстие, из которого нужно удалить припой, с одной стороны платы нагревается паяльником, а с другой стороны, когда припой в отверстии расплавится, в отверстие вставляется острие деревянной палочки. После этого паяльник убирают и, после затвердевания припоя, вытаскивают палочку. Отверстие остается открытым и новый ЭРЭ легко может быть вставлен для припаивания.
После окончания паяльных работ, плату следует очистить от остатков флюса. Техника такой очистки состоит в том, что на очищаемое место помещают небольшой кусочек хлопчато-бумажной ткани, смоченной этиловым спиртом, или бензо-спирто-смесью, и несколько раз проводят по ней жесткой кисточкой или щеткой, соответствующего размера. При необходимости, эту операцию повторяют до полной очистки платы от остатков флюса.
Контрольные вопросы.
1. Почему для пайки элементов СВТ следует использовать только низковольтный паяльник?
2. Почему паяльник должен быть заземлен?
3. Для чего используются медные теплоотводы?
4. Как можно очистить отверстия в печатной плате от остатков припоя?
5. Для чего используется этиловый спирт при ремонте СВТ?
2.4 Аппаратный и программный аспекты диагностики АПС
Диагностика неисправностей ПЭВМ имеет два аспекта: аппаратный и программный.
Аппаратный аспект подразумевает использование аппаратурных средств диагностики – стандартной КИА, специальной КИА, сервисных плат, устройств и комплексов.
При аппаратном методе диагностики, используются инструменты и приборы для измерений напряжений, параметров сигналов и логических уровней в схемах PC. Этот метод требует глубоких знаний логики работы РС, микросхемотехники, радиоэлектроники, ЭРИ и определенных навыков работы с сервисным тестовым оборудованием.
Следует отметить, что чисто аппаратная диагностика практически не встречается, разве что при диагностике с использованием словарей неисправностей или таблиц эталонных состояний, да и то – симптомы, которыми в этих случаях приходится руководствоваться, выработаны либо ОС, либо
тест-программой, либо микропрограммным тестом, а это уже не чисто аппаратная диагностика. Чисто аппаратной можно считать диагностику отдельных узлов ЭВМ, таких как ТЭЗ, которые проверяются не при автоматическом выполнении АПС проверочных тестов, а при подаче тестирующих последовательностей на исследуемый узел непосредственно от сервисного устройства, например УТК, или генератора стимулирующих воздействий.
Программный аспект диагностики подразумевает использование тестирующих программ различных классов: микропрограммные тесты, встроенные тест-программы, внешние тест-программы общего применения, наконец, – внешние тест-программы углубленного тестирования. Сюда же следует отнести и те небольшие программы или примеры, которые приходится писать самим обслуживателем АПС, для конкретных случаев диагностики неисправностей отдельного узла ЭВМ, ПЭВМ в конкретном режиме его работы.
При программном методе диагностики, большая часть диагностических процедур возлагается на диагностические программные средства. Этот метод требует определенных знаний различных диагностических программ, начиная с POST-программы и кончая программными средствами углубленной диагностики компонент ВС.
Тем не менее, насколько трудно обойтись без программных средств диагностики, настолько и невозможно точно определить место неисправности с точностью до компоненты схемы (ИМС БИС, конкретного ЭРЭ), или до конкретной цепи, без применения аппаратных средств диагностики (осциллографа, мультиметра и т. д.).
Похожие работы
... нарушения в процессе эксплуатации вычислительной техники с точки зрения руководителя предприятия (то, что было хорошо в этом месяце может быть плохо в следующем). При автоматизированном управлении средствами вычислительной техники должна соблюдаться иерархия “наблюдательности” - служба технической поддержки должна откликаться на каждую неисправность, начальник отдела ИТ – на любой просчет в ...

... работать ваш компьютер. Если это происходит до появления сообщений на мониторе, то неисправность можно определить по звуковым сигналам. 1.4 Необходимость диагностирования компьютерной системы Система автоматического диагностирования представляет собой комплекс программных, микропрограммных и аппаратурных средств и справочной документации (диагностических справочников, инструкций, тестов). ...
... ) и современной технологией, уровнем развития которой во многом определяется прогресс в производстве средств вычислительной техники. Электронно-вычислительные машины у нас в стране принято делить на поколения. Для компьютерной техники характерна прежде всего быстрота смены поколений - за ее короткую историю развития уже успели смениться четыре поколения и сейчас мы работаем на компьютерах пятого ...
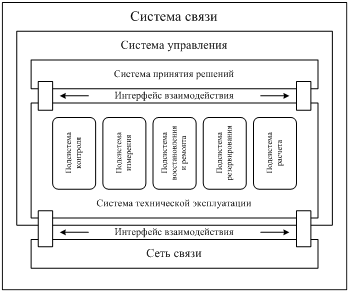
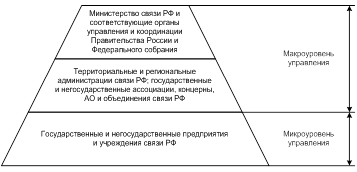
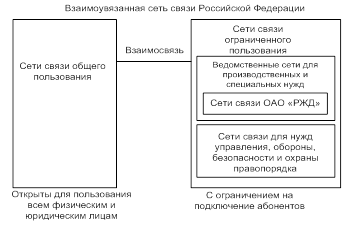
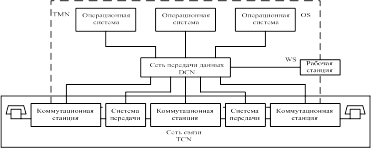
... Каждому элементу соответствует численный и символьный идентификатор. В имя переменной включается полный путь до нее от корневого элемента root. 3. Система мониторинга и администрирования 3.1 Системы управления технологическим сегментом магистральной цифровой сети связи ОАО «РЖД» РФ При построении современных цифровых сетей следует различать следующие сетевые уровни: уровень первичной ...
0 комментариев