Навигация
10. Переход к пункту 2.
Листинг программы:
.NOLIST
.INCLUDE "8535def.inc"
.LIST
.CSEG
.org $000
rjmp reset;прерывание по reset
.org $00e
rjmp adc0 ;прерывание по завершению преобразования АЦП
.ORG$011
reset:ldi r16, low(RAMEND)
out SPL, r16
ldi r16, high(RAMEND)
out SPH, r16 ;определить в указателе стека адрес RAMEND ldi r16, 0b11111110
out admux, r16 ;преобразовывать сигнал с первого выхода мультиплексора РА1
out DDRA, r16 ; определить все биты порта A на ввод
ldi r16, 0b11111110
out portA, r16 ; определить пассивный высокий уровень сигнала для всех битов порта А
ser r16 ;установить все биты $ff в регистр r16
out DDRB, r16 ;порт B на вывод
ldi r16, 0b11001110
out adcsr, r16;инициализация АЦП
ldi r16, 0b00000110 ;инициализация записи в ППЗУ
out EECR, r16
ldi r16, 0b00000000 ;инициализация чтения из ППЗУ
out EECR, r16
sei ;флаг глобального разрешения прерываний
main:
nop
rjmp main
adc0: ;подпрограмма обработки прерываний АЦП
inc r20
cpi r20, 1
brne adc1
in r17, ADCL ;занести младший байт кода результата преобразования АЦП в регистр r17
in r18, ADCH;занести старший байт кода результата преобразования АЦП в регистр r18
ldi r16, 0b00000001
out admux, r16 ;преобразовывать сигнал с первого выхода мультиплексора РА0 x1
sbi adcsr, ADSC ;запустить АЦП для однократного преобразования
reti
adc1:
clr r20
in r21, ADCL ;занести младший байт кода результата преобразования АЦП в регистр r21
in r22, ADCH ;занести старший байт кода результата преобразования АЦП в регистр r22
ldi r23, 0b10110011
ldi r24, 0b01101011 ;занести С1
ldi r27, 0b00000110
ldi r28, 0b11010101 ;занести С2
cpi r28, r18 ;сравнить C2 и x2
brne u1;перейти если разность (C2-x2) отрицательная
cpi r27, r17
brne u1
cpi r22, r24 ;сравнить С1 и x1
brne u1;перейти если разность (С1-х1) отрицательная
cpi r21, r23
brne u1
ldi r16,0b0000001;загрузить U2 линейная зависимость
out PORTB, r16
reti
u1:
lsl r17
rol r18
out EEARL, r17
out EEARH, r18
sbi EECR, EERE
rcall pausa ;задержка для нормального чтения из ППЗУ
in r11, EEDR
cpi r22, r11
brne otrsign
ldi r31,1
clr r30
add r17, r31
adc r18, r30
out EEARL, r17
out EEARH, r18
sbi EECR, EERE
rcall pausa ;задержка для нормального чтения из ППЗУ
in r11, EEDR
cpi r21, r10
brne otrsign
ldi r16,0b0000010; загрузить U1 нелинейная зависимость
out PORTB, r16
sbi adcsr, ADSC ; запустить АЦП для однократного преобразования
reti
otrsign:
ldi r16,0b0000100 ;загрузить U1 с обратным знаком нелинейная зависимость
out portB, r16
sbi adcsr, ADSC ; запустить АЦП для однократного преобразования
reti
;подпрограмма задержки для нормального чтения из ППЗУ
pausa:
inc r29
cpi r29, r39
brne pausa
clr r29
reti
5. ВЫБОР ЭЛЕМЕНТНОЙ БАЗЫ.
8.1. Выбор операционного усилителя
Так как одна из основных задач курсового проекта - реализовать закон управления с заданной погрешностью (не более 2,5%), рассчитаем обе схемы на точность попадания в прямоугольную область и на точность удержания рабочей точки. Для этого найдем максимальные отклонения напряжения от заданных значений, с помощью формулы:
 ,
,
где первое слагаемое – это дрейф нуля операционного усилителя. Второе слагаемое – влияние шумов усилителя. Третье – погрешность, вносимая резисторами.
Выбирая операционный усилитель необходимо минимизировать напряжение дрейфа нуля ОУ. Таким образом, необходимо добиться выполнения следующего условия:
![]() (мВ)
(мВ)
Значит, требуется выбрать операционный усилитель, параметры которого удовлетворяют последнему условию.
Из справочной литературы выбираем тип и необходимые характеристики операционного усилителя. В качестве операционного усилителя был взят малошумящий прецизионный усилитель OP27. Необходимые параметры занесены в таблицу 1.
Таблица 1.5.
| Параметр | Буквенное обозначение | Значение | Единица измерения |
| Число элементов в корпусе | Т | 1 | - |
| Напряжение смещения ОУ |
| 0,03 | мВ |
| Входной ток |
| 40 | нА |
| Частота единичного усиления |
| 8 | МГц |
| Минимальный стабильный коэффициент усиления |
|
| - |
| Напряжение питания |
|
| В |
| Максимальный потребляемый ток на один элемент |
| 9,3 | мА |
| Тип корпуса | DIP-8, SO-8, TO99-8 | - | - |
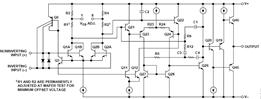
Рис.19. Функциональная схема малошумящего прецизионного усилителя OP27.
8.2.Выбор резисторов
В спроектированном устройстве будем использовать прецизионные резисторы типа С2-29. Это резисторы с металлодиэлектрическим проводящим слоем, предназначенные для работы в высокоточных электрических цепях постоянного, переменного и импульсного тока в качестве элементов навесного монтажа. Резисторы типа С2-29 относятся к изолированным.
По шкале Е192 резисторы имеют точность:
XR=0,001
Температурный коэффициент сопротивления:
aR=5,5·10-5 1/0С (при -10<t<200C)
aR=5·10-5 1/0С (при 20<t<500C)

Рис.20. Вид резистора С2-29В
8.3.Выбор конденсаторов
Также в схеме будем использовать конденсаторы типа К71-6.

Рис.21. Конденсатор типа K71-6.
Конденсаторы К71-6 предназначены для работы в цепях постоянного, переменного и импульсного тока.
Имеют цилиндрический металлический герметизированный корпус.
Диапазон рабочих температур: -60 … +200 0С.
9.АНАЛИЗ КАЧЕСТВЕННЫХ ПОКАЗАТЕЛЕЙ МИКРОКОНТРОЛЛЕРНОЙ СИСТЕМЫ.
Динамический диапазон измеряемой величины х1:
![]()
Относительная погрешность дифференциального напряжения, зависящая от технологии изготовления ЧЭ ![]() .
.
Статическая погрешность измерения величины х1:
![]()
Коэффициент ослабления синфазного напряжения:
![]()
Цена одного кванта:
![]()
Технологическая несбалансированность моста чувствительного элемента приводит к смещению нуля усилителя:
![]() (В)
(В)
Относительная погрешность сопротивления резисторов схемы:
![]() (1/0С)
(1/0С)
Результирующая статическая погрешность устройства:
![]()
Следовательно, результирующая погрешность меньше результирующего кванта 10-разрядного АЦП. Именно поэтому доминирующей составляющей общей погрешности является смещение нуля, вызванное влиянием соответствующих параметров ОУ.
Влияния собственного шума активных элементов:
![]() ( нВ/
( нВ/![]() ).
).
Таким образом, предложенное схемотехническое решение можно рассматривать в качестве основы при построении аналоговых сенсорных интерфейсов как интеллектуальных датчиков, так и микроконтроллеров, ориентированных на задачи измерительной техники и автоматического управления.
ЗАКЛЮЧЕНИЕ
Для автоматизации производства и технологических процессов датчики являются неотъемлемой составляющей частью САУ. Датчики с цифровым выходом всё более вытесняют датчики с аналоговым выходом из-за простоты разработки канала обмена с микроконтроллером, но каналы обработки аналогового сигнала по сей день имеют более высокую интеграцию и универсальность за счёт того, что компоненты, которые включает в себя канал предназначены для универсальных подсистем. На базе АЦП, ЦАП, коммутаторов, схем выборки и хранения, операционных усилителей и других аналоговых элементов разрабатывают операционные узлы, способные обрабатывать аналоговую информацию без преобразования ее в цифровую форму. Каналы обработки аналоговой информации обладают большим быстродействием по сравнению с каналами обработки цифровой информации. При выполнении данного курсового проекта было разработано двухканальное устройство согласования датчиков с микроконтроллером, произведен расчет параметров системы, выполнено моделирование. Данное устройство имеет высокую интеграцию и универсальность, обладает модернизационным запасом, стабильностью работы и высоким быстродействием, что подтверждают проделанные расчеты и результаты моделирование.
СПИСОК ЛИТЕРАТУРЫ
1) А.В. Евстифеев Микроконтроллеры AVR семейства Classic фирмы ATMEL. Москва, Издательский дом «Додэка-XXI», 2006.
2) Иванов Ю.И., Югай В.Я. Микропроцессорные устройства систем управления. Учебное пособие для вузов. -Таганрог. Изд. ТРТУ, 2005.
3) Иванов Ю.И., Югай В.Я. Применение микроконтроллеров AVR. Учебное пособие, Таганрог. Изд. ТРТУ, 2003.
4) Крутчинский С.Г., Маньков Ю.В. Микроконтроллеры и локальные системы. Методическое пособие по проектированию. Таганрог. Изд. ТРТУ, 1999.
5) Иванов Ю.И., Югай В.Я. Интерфейсы средств автоматизации. Учебное пособие.-Таганрог. Изд. ТРТУ, 2005.
6) Баранов В.Н. Применение микроконтроллеров AVR. Схемы, алгоритмы, программы. Издательский дом «Додэка-XXI», 2004
7) «Микросхемы ЦАП и АЦП»/ Б.Г. Федорков, В.А. Телец, М.: Энергоатомиздат 1990, 320с.
8) Справочник «Резисторы», под редакцией Четверткова.
Похожие работы
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
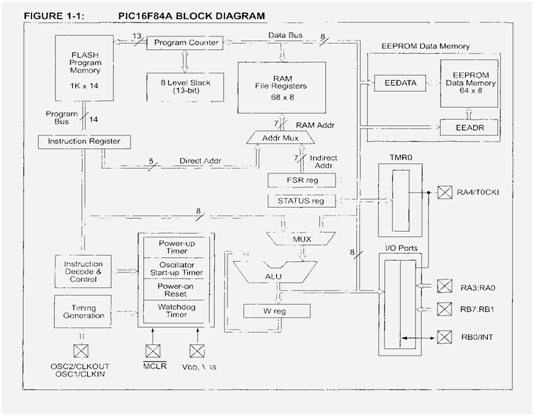
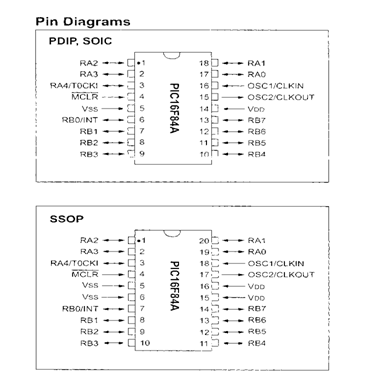
... значительно облегчают процесс изучения контроллеров РІС и написание для них программ. В данном курсовом проекте реализована микропроцессорная система на базе микроконтроллера для терморегулятора аквариума. Проект основывается на микроконтроллере PIC16F84А. 1. Описание объекта и функциональная спецификация Устройство отличается от известных измерителей температуры на DS1820 возможностью ...
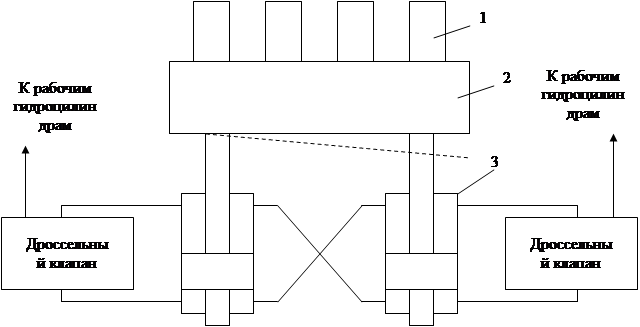
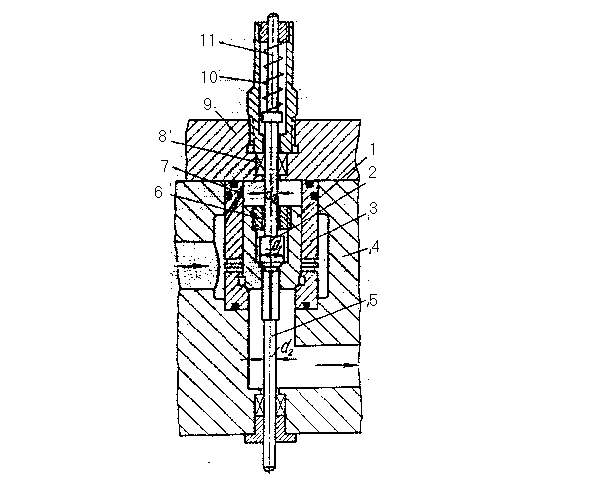
... сигнализировать о повышении давления в соответствующих точках схемы и при необходимости отключить приводной электродвигатель для предотвращения аварийных ситуаций. Первоочередной задачей при разработке системы синхронизации положения траверсы пресса является расчет управляемого впускного клапана, т.к. данный гидроаппарат не является типовым и не имеет справочных данных. После расчета впускного ...
0 комментариев