Навигация
Инструментальный усилитель
45593
знака
5
таблиц
17
изображений
4.2. Инструментальный усилитель.
В разрабатываемой микроконтроллерной системе входной блок состоит из измерительного моста и инструментального усилителя. Заметную роль в данной схеме играет входной, масштабный усилитель, в основном от того с какой точностью будет усиливаться входной сигнал, зависит погрешность преобразования АЦП.
Согласно техническому заданию, входная величина ![]() измеряется сенсорным элементом (измерительный мост), а величина
измеряется сенсорным элементом (измерительный мост), а величина ![]() - с помощью датчика с токовым выходом. Так как датчик имеет большую синфазную помеху, в качестве масштабного усилителя используется инструментальный, который согласовывает
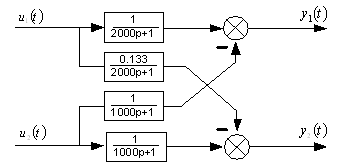
- с помощью датчика с токовым выходом. Так как датчик имеет большую синфазную помеху, в качестве масштабного усилителя используется инструментальный, который согласовывает ![]() с опорным источником напряжения. Схемы измерительного моста и инструментального усилителя имеют вид:
с опорным источником напряжения. Схемы измерительного моста и инструментального усилителя имеют вид:
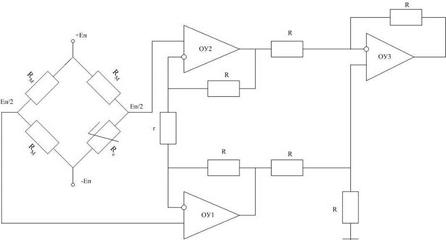
Рис.6 . Измерительный мост и инструментальный усилитель.
Таким образом при согласовании ОУ1 и ОУ2 результирующая погрешность будет определяться параметрами ОУ3.
Измерительный мост преобразует значения входной величины ![]() в эквивалентное ей значение напряжения (с коэффициентом пропорциональности
в эквивалентное ей значение напряжения (с коэффициентом пропорциональности ![]() ), в соответствии с законом изменения значений реостата
), в соответствии с законом изменения значений реостата ![]() . Параметры ОУ выбираются из условия минимизации дрейфа нуля.
. Параметры ОУ выбираются из условия минимизации дрейфа нуля.
Напряжение на выходе усилителя определяется соотношением: ![]() , где
, где ![]() - коэффициент усиления схемы.
- коэффициент усиления схемы.
Примем ![]() В.
В.
Выбираем значения ![]() кОм,
кОм, ![]() кОм.
кОм.
Таким образом, чтобы получить единичный коэффициент усиления ИУ нужно выбрать ![]() , тогда
, тогда ![]() В.
В.
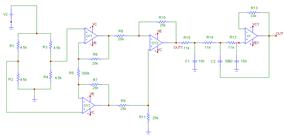
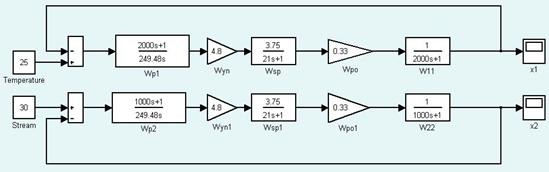
Рис.7. Схема канала №1.
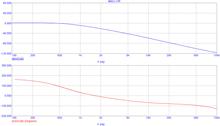
Рис.8. АЧХ и ФЧХ канала №1.
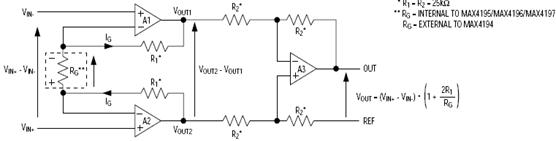
В качестве прецизионного инструментального усилителя можно использовать МАХ 4195:

СИНТЕЗ КАНАЛА №2.
5.1. Датчик давления «АРКТУР-01» с токовым выходом.
Назначение.
Датчик давления Арктур-01 (в дальнейшем – датчик) предназначен для непрерывного преобразования избыточного давления жидкостей и газов, в унифицированный токовый выходной сигнал.
Датчик может применяться при контроле, регулировании и управлении технологическими процессами, а также при учете, в том числе коммерческом, жидкости и газа.
Арктур-01–цифровой датчик избыточного давления, имеющий климатическое исполнение УХЛ1 по ГОСТ 15150, предназначенные для работы при температуре окружающей среды от минус 40°С до +80°С, преобразующий измеряемое давление в унифицированный токовый выходной сигнал 0-5 мА (по 4-х-проводной линии связи) или 4-20 мА (по 2-х-проводной линии связи).
Датчик имеет невзрывозащищенное исполнение.
По эксплуатационной законченности датчики являются изделиями ГСП третьего порядка по ГОСТ 12299.
Характеристики, параметры, размеры.
Верхние пределы измерений избыточного давления датчиков — 0,06*; 0,1; 0,16; 0,25; 0,40; 0,60; 1,0; 1,6; 2,5; 4,0; 6,0; 10; 16; 25; 40; 60;100 МПа.
Конструкция датчиков обеспечивает возможность подстройки нуля и верхнего предела изменения выходного сигнала при выпуске из производства и в процессе эксплуатации.
Конструкция датчиков исключает несанкционированный доступ к электронному блоку.
Конструкция датчиков обеспечивает возможность измерения давления сред, по отношению к которым материалы, контактирующие с измеряемой средой, являются коррозионностойкими.
Пределы основной допускаемой погрешности, выраженной в процентах от верхнего предела измерений, g равны ± 0,1; ± 0,15; ± 0,2; ± 0,25; ± 0,5%
Вариация выходного сигнала не превышает допускаемой основной погрешности ![]() .
.
Номинальная статическая характеристика преобразования датчиков линейно-возрастающая и имеет вид:
Y-YН = K*Х в интервале Yн≤Y≤Yв,
где Y – текущее значение выходного сигнала датчика, мA;
Yн,Yв – нижний и верхний пределы изменения выходного сигнала, соответственно, мA;
К – коэффициент пропорциональности, указанный в таблице 1.1, мA/МПa;
Х – значение измеряемой величины, МПa;
Таблица 1.1
| Верхний предел диапазона измерения давления, МПа | Коэффициент пропорциональности К, мА/МПа, для диапазонов изменения выходного сигнала | |
| от 4 до 20 мА | от 0 до 5 мА | |
| 0,06 0,10 0,16 0,25 0,40 0,60 1,0 1,6 2,5 4,0 6,0 10 16 25 40 60 100 | 266,667 160,000 100,000 64,000 40,000 26,666 16,000 10,000 6,400 4,000 2,667 1,600 1,000 0,640 0,400 0,267 0,160 | 83,3333 50,0000 31,2500 20,0000 12,5000 8,3333 5,0000 3,1250 2,0000 1,2500 0,8333 0,5000 0,3125 0,2000 0,1250 0,0833 0,050 |
Допускаемое отклонение характеристики преобразования ![]() м датчиков от номинальной статической характеристики не превышает 0.8
м датчиков от номинальной статической характеристики не превышает 0.8 ![]()
Диапазоны изменения выходных сигналов, тип линии связи и максимальное сопротивление нагрузки соответствуют указанным в таблице1.2.
Таблица 1.2
| Диапазон изменения выходного сигнала, мА | Тип линии связи | Сопротивление нагрузки Rн, не более кОм |
| 4 – 20 | Двухпроводная | 0,5 |
| 0 – 5 | Четырехпроводная | 2,5 |
Значение выходного сигнала, соответствующее нулевому значению давления, равно 0 или 4 мА – для датчиков с диапазоном изменения выходного сигнала 0-5 мА и 4-20 мА, соответственно.
Электрическое питание датчиков должно осуществляться от источника питания постоянного тока напряжением (З6 + 0,72) В. При работе датчика в режиме 4-20 мА с нагрузкой Rн мах допускается уменьшение напряжения на датчике до 15 В за счет падения напряжения на нагрузке.
Пределы допускаемой дополнительной погрешности gt, вызванной изменением температуры окружающего воздуха на каждые 10°С, не более указанной в табл.1.3.
Пределы допускаемой дополнительной погрешности, вызванной изменением напряжения питания со скоростью не более ± 0.5 В/С не превышают значений, указанных в табл. 1.3.
Пределы допускаемой дополнительной погрешности датчиков, вызванной воздействием внешнего переменного магнитного поля частотой 50 Гц и напряженностью 400 А/м или внешнего постоянного магнитного поля напряженностью 400 А/м, при самых неблагоприятных фазе и направлении поля указаны в табл. 1.3.
Таблица 1.3
| Пределы основной допускаемой погрешности, % | Пределы допускаемой дополнительной погрешности, %, вызванной | ||
| изменением температуры окружающего воздуха на каждые 10°С | изменением напряжения питания | воздействием магнитного поля | |
| ± 0,10 | - | ± 0,05 | ± 0,10 |
| ± 0,15 | ± 0,15 | ± 0,05 | ± 0,16 |
| ± 0,20 | ± 0,20 | ± 0,05 | ± 0,16 |
| ± 0,25 | ± 0,25 | ± 0,16 | ± 0,25 |
| ± 0,50 | ± 0,45 | ± 0,25 | ± 0,4 |
Пределы допускаемой дополнительной погрешности, вызванной изменением сопротивления нагрузки, не выходят за пределы +0,01% от диапазона изменения выходного сигнала на каждые 100 Ом изменения сопротивления нагрузки.
Датчики герметичны при воздействии давления в 1,25 раза превышающего наибольший верхний предел измерений.
Полный средний срок службы не менее 12 лет, кроме датчиков, применяемых при измерении параметров химически агрессивных сред.
Средний срок службы датчиков, применяемых при измерении параметров химически агрессивных сред, не менее шести лет.
Средняя наработка на отказ с учетом технического обслуживания, регламентируемого РЭ, составляет 100000 ч. Критерием отказа является несоответствие датчиков требованиям 1.2.3 и нарушение герметичности рабочей камеры.
Потребляемый датчиками электрический ток при напряжении питания 36 В не более 14 мА.
Номинальная масса датчиков не более 1 кг.
Степень защиты корпусов датчиков от воздействия пыли и воды IP55 по ГОСТ 14254.
По устойчивости к механическим воздействиям (виброустойчивость и вибропрочность) датчик соответствует исполнению N1 по ГОСТ 12997.
Составные части датчика не являются источником образования горючей среды и источников зажигания в горючей среде.
Устройство и работа датчика.
Конструктивно датчик представляет собой законченное устройство, состоящее из измерительного преобразователя, электронного блока, элементов, обеспечивающих подключение датчика к магистрали, и корпуса, в котором размещены все элементы и блоки датчика. На крышке корпуса имеется совмещенный корректор нуля и верхнего предела изменения выходного сигнала и соединитель для подключения пульта для настройки, закрывающиеся винтовыми заглушками, а также кабельный ввод. Соединительный кабель несъемный, длиной 1.5 м.
Измеряемое давление подается в камеру измерительного блока и преобразуется в деформацию мембраны тензопреобразователя и, как следствие, изменение электрического сопротивления резисторов тензопреобразователя, размещенного в измерительном блоке. При этом на выходе тензопреобразователя появляется выходное напряжение, зависящее от давления на мембрану тензопреобразователя.
Средство контроля выходного сигнала должно иметь допускаемую основную погрешность не более, чем:
|![]() |≤0,15Imax/100.
|≤0,15Imax/100.
Габаритные и присоединительные размеры датчика

Рис.9.Габаритные и присоединительные размеры датчика Арктур-01
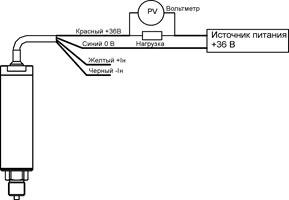
Рис.10.Схема подключения датчика давления АРКТУР-01 с выходным сигналом 4-20 мА и двухпроводной линией связи.
5.2.Преобразователь ток-напряжение.
Поскольку выбранный датчик имеет токовый выход 4…20 мА, необходимо рассчитать схему таким образом, чтобы при входном токе 4 мА напряжение на выходе было 0 В, а при 20 мА – 2,5 В.
Для этой схемы можно записать следующую систему уравнений :
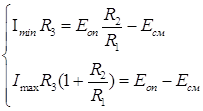
Тогда
 (Ом)
(Ом)
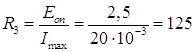
Решая систему уравнений находим:
![]()
Пусть ![]() кОм, тогда
кОм, тогда ![]() кОм.
кОм.
Произведём расчет полученной схемы по постоянному току с помощью программы MicroCap8, чтобы убедиться в правильности работы схемы:
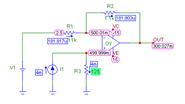
Рис.11. Анализ по постоянному току в случае ![]() мА.
мА.

Рис.12. Анализ по постоянному току в случае ![]() мА.
мА.

Рис.13. Анализ по постоянному току канала №2.

Рис.14. АЧХ и ФЧХ на выходе канала.
АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ.
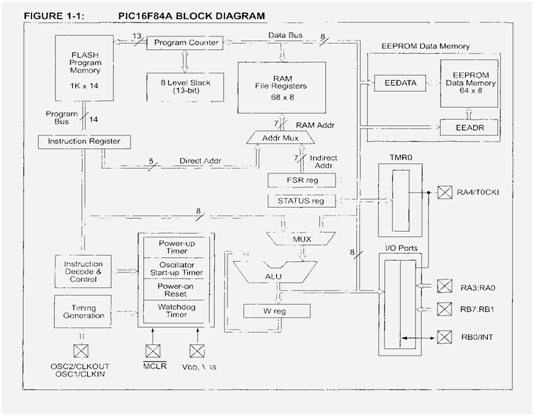
АЦП, имеющий разрядность n=10, встроенный в МК AVR работает по алгоритму последовательных приближений, погрешность преобразования - не более 2 единиц младшего значащего разряда, время преобразования 65 - 260 мкс. АЦП совместно со встроенным аналоговым мультиплексором обеспечивает преобразование в 10-ти разрядный двоичный код сигналов по 8 аналоговым входам (альтернативная функция линий ввода-вывода порта А) в диапазоне напряжений от О (AGND) до опорного (AREF).
Для снижения уровня помех цепи питания (AGND, AVCC) схем преобразования аналоговых сигналов подключаются отдельно (рис. 1), напряжение питания AVCC не должно отличаться от напряжения питания VCC более чем на ±0,3 В. Опорное напряжение должно лежать в диапазоне от 2 В до напряжения питания AVCC. Код АЦП $000 соответствует нулевому входному сигналу, максимальный код $3FF соответствует сигналу, равному опорному, минус вес единицы младшего значащего разряда.
Номер входа мультиплексора, с которого поступает сигнал для преобразования в АЦП, определяется тремя младшими битами MUX2, MUX1, MUXO управляющего регистра ADMUX. Любой из восьми входов может быть выбран через ADMUX записью в него соответствующего кода в любой момент времени, однако переключение входов фактически производится только после завершения очередного цикла преобразования АЦП.
АЦП может работать в режиме однократного преобразования или циклически с автоматическим повторным запуском после каждого преобразования. По окончании преобразования формируется флаг прерывания ADIF со стандартной процедурой вызова вектора прерывания ADC с адресом $00е и записью 10-разрядного кода в двухбайтовый регистр ADCL (младшие 8 бит результата), ADCH (старшие 2 бита результата). Чтение данных из регистра результата ADC должно начинаться обязательно с младшего байта (см. примечание на с. 20). Точность АЦП зависит от тактовой частоты преобразования, рекомендуется диапазон тактовых частот 50 - 200 кГц, при более высоких частотах точность преобразования снижается. Стандартный цикл преобразования требует 13 тактов работы и при рекомендуемом значении тактовой частоты 100 кГц определяет время преобразования 130 мкс.
Кроме регистров ADMUX, ADCH, ADCL, работа АЦП определяется регистром ADCSR, который также содержится в файле регистров ввода-вывода.
Символические имена битов управления в регистре ADCSR
![]()
ADEN - бит разрешения: 0 - АЦП выключен, 1 - АЦП включен.
ADSC - бит запуска преобразования, в режиме однократного преобразования. Единица должна записываться при каждом запуске, в циклическом режиме - один раз для запуска первого преобразования.
ADFR - бит режима преобразования: 1 - циклический режим, 0 - однократный.
ADIF - флаг прерывания, устанавливается после завершения преобразования и записи кода в выходной регистр АЦП. Очищается автоматически при вызове вектора прерывания либо записью 1 в этот бит.
ADIE - бит разрешения прерывания АЦП, 1 разрешает прерывание.
ADPS2, ADPS1, ADPS20 - биты управления тактовой частотой АЦП, определяют коэффициент деления тактовой частоты микроконтроллера следующим образом:
0 - коэффициент деления 2,
1 - коэффициент деления 2,
10 - коэффициент деления 4,
11 - коэффициент деления 8,
100- коэффициент деления 16,
101- коэффициент деления 32,
110- коэффициент деления 64,
111- коэффициент деления 128.
Дополнительное снижение уровня помех для повышения точности преобразования можно получить, если на время преобразования АЦП приостановить работу процессора в микроконтроллере переходом в режим "idle". Возврат в рабочее состояние должна обеспечивать подпрограмма обработки прерывания АЦП.

Рис.15. Структурная схема модуля АЦП.
Похожие работы
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
... значительно облегчают процесс изучения контроллеров РІС и написание для них программ. В данном курсовом проекте реализована микропроцессорная система на базе микроконтроллера для терморегулятора аквариума. Проект основывается на микроконтроллере PIC16F84А. 1. Описание объекта и функциональная спецификация Устройство отличается от известных измерителей температуры на DS1820 возможностью ...
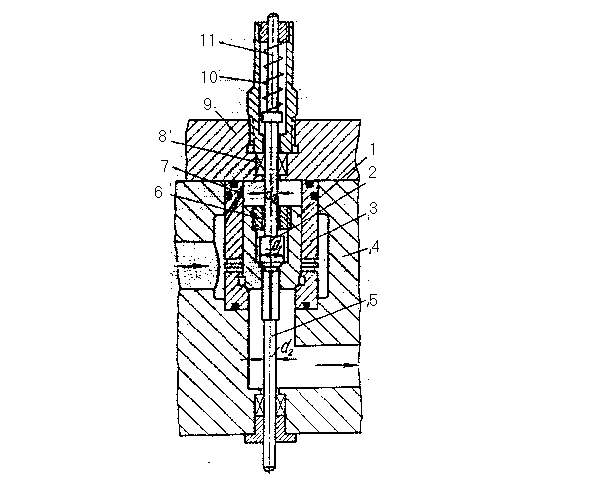
... сигнализировать о повышении давления в соответствующих точках схемы и при необходимости отключить приводной электродвигатель для предотвращения аварийных ситуаций. Первоочередной задачей при разработке системы синхронизации положения траверсы пресса является расчет управляемого впускного клапана, т.к. данный гидроаппарат не является типовым и не имеет справочных данных. После расчета впускного ...
0 комментариев