Навигация
Разработка динамических моделей для транспортно-производственной системы
38282
знака
9
таблиц
2
изображения
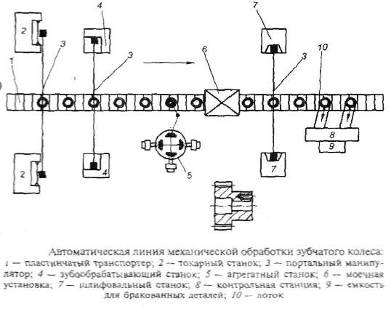
3. Разработка динамических моделей для транспортно-производственной системы.
3.1 Однопродуктовая многоэтапная транспортно-производственная модель.
Возьмем из задачи, описанной выше, только половину условия:
Ai(количество поставщиков зерна) равно 3, и Bj (количество потребителей - элеваторов) равно 3. В таблице 2 предоставлены данные по суммарные затраты на транспортировку и обработку зерна (в расчете на 1 ц) на каждом из элеваторов. Суммарно из всех пунктов производства можно поставить 100 тыс.ц. зерна [2].
Таблица 2
| Потребители Поставщики | Михайловское | Лебедево | Озерное | Мощность поставщиков |
| Заря | 14 | 14 | 15 | 35 |
| Восход | 16 | 11 | 9 | 45 |
| Радуга | 15 | 15 | 12 | 20 |
| Резерв | 0 | 0 | 0 | 10 |
| Потребности потребителей | 20 | 55 | 25 | 110 |
Задача, записанная выше называется однопродуктовой многоэтапной транспортно-производственной моделью. Для решения данной задачи воспользуемся методом северо-западного угла и занесем полученные данные в таблицу 3.
Таблица 3.
| Потребители Поставщики | Михайловское | Лебедево | Озерное | Мощность поставщиков | |||
| Заря | 14 | 20 | 14 | 15 | 15 | 35 | |
| Восход | 16 | 11 | 40 | 9 | 5 | 45 | |
| Радуга | 15 | 15 | 12 | 20 | 20 | ||
| Потребности потребителей | 20 | 55 | 25 | 110 | |||
Для первоначального плана (табл. 2) суммарные затраты на транспортировку и обработку зерна составляют 1215 у.е.
Нетрудно убедиться, что в нашем случае при использовании тех же направлений другой допустимый план построить нельзя. Изменение объема перевозок в любой из занятых клеток немедленно приведет к возникновению дисбаланса. Другой допустимый план можно построить, использовав лишь незанятые клетки таблицы. Таких допустимых планов можно построить очень много и каждый из них будет характеризоваться своим значением целей функции. Возникает вопрос о способе целенаправленного построения новых планов с улучшенной целевой функцией. Его решение основано на потенциалах и сформулированном выше признаке оптимальности.
Используя принятые обозначения, запишем следующие соотношения между оценками для клеток, вошедших в план:
| v1 - u1 = 14 | v2 – u1 = 14 | v2 - u2 = 11 |
| v3 - u2 = 9 | v3 - u3 = 12 | v3 - u4 = 0 |
Число неизвестных в данной системе уравнений на единицу больше числа уравнений, поэтому решение может быть получено лишь с точностью до постоянного слагаемого. Приравняв значение одной из переменных какому-либо числу, однозначно находим значения других переменных.
Пусть u1 = 0, тогда
v1 = 14; v2 = 14; u2 = 3; v3 =12; u3 = 0; u4 = 12.
Используя найденные потенциалы, рассчитаем для всех незанятых клеток величины: и поставим их (с соответствующим знаком) в табл. 4
∆i,j = vj - ui - ti,j
∆1,3 = 12- 0 - 15 = -3
∆2,1 = 14 – 3 – 16 = -5
∆ 3,1 = 14 – 0 – 15 = -1
∆3,2 = 14- 0 - 15 = -1
∆4,1 = 14 – 12 – 0 = +2
∆4,2 = 14 – 12 – 0 = +2
Таблица 4
Потенциалы и направления улучшения опорного плана
| Потребители Поставщики | Михайловское | Лебедево | Озерное | Мощность поставщиков | |||
| Заря | 14 | 20 | 14 | 15 | 15 | ∆1,3 = -3 | 35 |
| Восход | 16 | ∆ 2,1 = -5 | 11 | 40 | 9 | 5 | 45 |
| Радуга | 15 | ∆3,1 = -1 | 15 | ∆3,2 = -1 | 12 | 15 | 20 |
| Потребности потребителей | 20 | 55 | 25 | 110 | |||
Отрицательные величины ∆i,j показывают, что везти по данному направлению невыгодно. Разница цен у потребителей и поставщиков не покрывает транспортных расходов и на каждой единице транспортируемого продукта мы будет терпеть убытки (по сравнению с предыдущим опорным планом) в размере ∆i,j . В клетках, где ∆i,j > 0, наоборот, может быть получен эффект в размере ∆i,j на единицу перераспределяемого продукта. В рассматриваемом примере таких клеток две, причем обе имеют значение +2. Выберем любую из них, пусть это будет клетка на пересечении 4-ой строки и 2-го столбца и пометим ее плюсом. Определяя объем поставок в эту клетку, следует руководствоваться следующими соображениями:
во-первых, поставив в нее какой-то объем перевозок, мы должны вычесть эту же величину из других занятых клеток, чтобы не нарушить балансовых соотношений по ввозу и вывозу.
во-вторых, число клеток, включенных в новый план должно оставаться неизменным на единицу меньше суммарной численности поставщиков и потребителей.
Следовательно, вместо вошедшей клетки, одна, содержащаяся в предыдущем плане, должна быть исключена. Оба условия легко выполнить, если перераспределение поставок осуществлять по контуру (табл.4). Искомую величину перераспределяемой поставки определит минимальное значение, стоящее в клетках со знаком минус. В данном случае - 10 тыс. ц. Меньше этой величины перераспределять невыгодно, так как уменьшается эффект от улучшения плана и кроме того, на единицу превышается допустимое количество загружаемых клеток. Больше перераспределять нельзя, потому что в одной из клеток появится отрицательная перевозка, что абсурдно.
Новый (оптимальный) план и соответствующая ему система оценок приведен в табл.5
Таблица 5
| Потребители Поставщики | Михайловское | Лебедево | Озерное | Мощность поставщиков | u | |||
| Заря | 14 | 20 | 14 | 15 | 15 | ∆1,3 = -3 | 35 | 0 |
| Восход | 16 | ∆ 2,1 = -2 | 11 | 30 | 9 | 15 | 45 | 3 |
| Радуга | 15 | ∆3,1 = -1 | 15 | ∆3,2 = -1 | 12 | 20 | 20 | 0 |
| Потребности потребителей | 20 | 55 | 25 | 110 | ||||
| v | 14 | 14 | 12 | |||||
Рассчитав значения потенциалов vj и ui и величины ∆i,j запишем их соответствующие клетки (табл.5). Значения ∆i,j во всех незанятых клетках не больше нуля, что свидетельствует об оптимальности построенного плана, для которого значение целевой функции равно 1195. По сравнению с первым опорным планом затраты удалось снизить на 20 единиц.. Заметим, в одной из клеток ∆4,1 = 0, что свидетельствует о неоднозначности оптимального плана, т.е. достигнутое значение целевой функции может быть получено и при других значениях переменных. При решении данной задачи в программе Excel мы получим значения, которые приведены в таблице 5 [5].
Похожие работы

... 4.5 Реализация динамической модели в Simulink На основе системы дифференциальных уравнений (п. 4.3) с помощью интерактивной системы Simulink для моделирования нелинейных динамических систем составим схему динамической модели привода с фрикционным вариатором (рис. 4.3). Обозначения переменных, используемых в схеме динамической модели приведены в таблице 4.1. Таблица 4.1 - Обозначения ...
... систем: мягкая донаучная производственная система (военно-анархическая система); жесткая научная производственная система (фордизм); мягкая научная система, основанная на гибких производственных технологиях. 2. Организация производственной системы в ЗАО «Колос» 2.1 Организационно–экономическая характеристика деятельности ЗАО «Колос» Объектом исследования работы является Закрытое ...
... к точности, хотя это уменьшение весьма не значительное. 4.Программные средства для исследования динамической модели портального манипулятора 4.1 Программа для вычисления параметров переходного процесса портального манипулятора Для исследования полученной динамической модели, построения графиков приведенных в работе, использовалась программа “Модель портального манипулятора МРЛ-901П в момент ...


... маршруту транспортирования заготовок; • управление складом инструментов; • управление транспортировкой грузоединиц; • управление оборудованием технологического процесса; • управление складом готовых изделий. 2. По принципу реализации производственного процесса различают операции: • динамическое и статическое ведение состояния склада материала; • динамическое и статическое ...
0 комментариев