Навигация
6. Погрешности
Составляющими погрешностей в данной работе являются:
· мешающие факторы
· моделирование
· расчеты
· настройка нейронных сетей
К мешающим факторам относятся: неоднородности материалов, неточное задание характеристик, неплотное прилегание датчика к объекту контроля, краевые эффекты – однако все эти факторы мы не учитываем, в силу того, что рассматриваем идеальный случай.
Погрешности моделирования складываются из неточности задания геометрии модели, шага разбиения сетки, движения дефекта (считаем, что скорость движения не превышает 0,5 м/с). Данную составляющую общей погрешности считаем не значительной, так как компьютерные средства позволяют создавать модель с высокой точностью.
В ходе получения сигналов и их обработки возникает погрешность расчетов, которая в основном обусловлена шагом, с которым мы снимаем показания. Так как этот процесс автоматизирован и рассматривается идеальная модель, эта составляющая не сильно влияет на конечный результат.
Основной составляющей погрешности является погрешность, с которой созданная нейронная сеть классифицирует дефекты и делает прогнозы. Рассмотрим ее подробнее.
Были рассмотрены три различные структуры искусственных нейронных сетей:
· многослойный персептрон
· вероятностная или обобщенная регрессионная нс
· радиальная базисная функция
Стояла задача выбрать тип сети с наименьшей погрешностью на выходе.
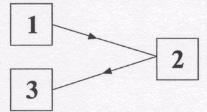
Погрешность определения раскрытия дефекта.
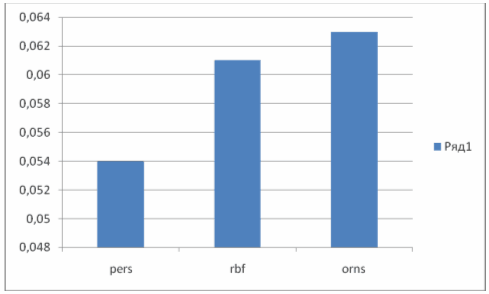
Рисунок 19
На диаграмме (рис. 19) видим, что среднее значение абсолютной погрешности многослойного персептрона минимальное. И хотя все три сети удовлетворяют требованиям к определению раскрытия, преимущество у персептрона.
В табл. 3 приведены значения средней, максимальной и минимальной погрешностей посчитанных по результатам обучения всех трех сетей. Для каждой сети было использовано 100 различных значений.
| error | pers | rbf | orns |
| average | 0,054 | 0,061 | 0,063 |
| max | 0,238 | 0,253 | 0,4 |
| min | 0,001 | 0 | 0 |
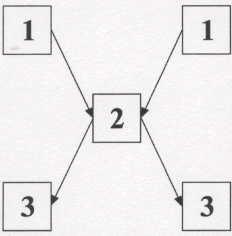
Погрешность определения глубины дефекта.

Рисунок 20
Значение среднего значения абсолютной погрешности в данном случае (рис.20) минимальна у обобщенной регрессионной нейронной сети, однако ее за основу не стоит брать. В процессе выбора архитектуры сети данного типа, сеть с наименьшей ошибкой имеет 8 входов, 62 элемента на 1 скрытом слое и 2 элемента на 2 скрытом слое. Вероятность того, что сеть с такой архитектурой при имеющемся количестве сигналов для обучения, просто запомнит сигналы, а не обучится, возрастает. Поэтому для нас предпочтительнее выбрать сеть типа персептрон.
В табл. 4 приведены значения средней, максимальной и минимальной погрешностей посчитанных по результатам обучения всех трех сетей. Для каждой сети было использовано 100 различных значений.
| error | pers | rbf | orns |
| average | 0,043 | 0,052 | 0,04 |
| max | 0,144 | 0,251 | 0,205 |
| min | 0 | 0,002 | 0 |
Погрешность, имеющая в данном случае интерес и максимально влияющая на результаты, является погрешностью выбранной нейронной сети. Для нас важна точность, с которой она сможет определять дефекты.
Заключение
В ходе проведенной работы была разработана, конечно элементная модель, позволяющая определять продольные и поперечные трещины. Сформирована база сигналов, по которой были рассчитаны информативные признаки, а также выявлены зависимости фазы и амплитуды от различных параметров дефекта и от нескольких частот.
С использованием информативных признаков был проведен корреляционный анализ, показавший наиболее коррелирующие признаки с параметрами дефектов. По результатам данного анализа были выбраны признаки, использованные для обучения нейронных сетей.
Полученные результаты не противоречат фундаментальным физическим законам и принципам. Погрешности лежат в допустимых пределах.
Полученные нейронные сети, могут быть использованы в дальнейших экспериментальных исследованиях по контролю продольные и поперечные дефекты труб.
Литература
1. Brudar B. How to Distinguish Surface and Subsurface Cracks // Electromagnetic NDT Methods: NDT International, Vol. 17, August 1984, p 221-223.
2. Brudar B. Magnetic Leakage Fields Calculated by the Method of Finite Differences// Electromagnetic NDT Methods: NDT International, Vol. 18, No.6, December 1985, p 353-357.
3. В.И. Егоров. Применение ЭВМ для решения задач теплопроводности. Санкт-Петербург, 2006.
4. С.Н. Бозиев. MATLAB 2006a в примерах. РГУ нефти и газа им. И.М. Губкина, 2006.
5. Song S-J. Model-based interpretation of experimental eddy current signals obtained from steam generator tubes by bobbin probe. // Insight. 2003. №5.Приложение 1
Программа, написанная в среде MatLab для создания базы сигналов.
% параметры геометрии объекта контроля и катушек
air1H=10e-3; %толщина слоя воздуха над ОК
L=50e-3; %длинна трубы
air2H=6.5e-3; %толщина слоя воздуха под ОК
OKH=1.5e-3; %толщина трубы
OKD=8e-3; %внешний диаметр трубы
H_k=2e-3; %высота катушки
l_k=3e-3; %ширина катушки
delta_k=1e-3; %зазор между ОК и катушками
D_k = 3e-3; %расстояние между катушками
delta_izm=0.5e-3; %зазор между ОК и измерительной катушкой
r=0.01; %радиус вторичной катушки для расчетов
%Параметры геометрии дефекта по умолчанию
ld_def=1e-3; %длинна дефекта
x_def=(L/2)-ld_def; %положение центра дефекта по длине ОК
hd_def=1e-3; %глубина дефекта
fd_def=1; %форма - отношение меньшего основания к большему
%fd = 1 - прямоугольник,
%1<fd<0.01 - трапеция
%fd<0.001 -> треугольник
%Параметры эксперимента
x_start=20e-3; %начало зоны контроля
x_end=0e-3; %конец зоны контроля
x_step=-0.5e-3; %шаг съема данных
hd_start=0.4e-3; %начальная глубина дефекта
hd_end=1.2e-3; %конечная глубина дефекта
hd_step=0.2e-3; %шаг по глубине
ld_start=0.1e-3; %начальная протяженность дефекта
ld_end=1.0e-3; %конечная протяженность дефекта
ld_step=0.2e-3; %шаг по ротяженности
fd=[1,0.01,0.3,0.7]; %формы
f=[25e3,100e3,200e3,400e3]; %частоты, в герцах
f_ind=1;
x_size=size((x_start:x_step:x_end)');
x_size=x_size(1);
clear data
%figure;GEOMPLOT(fem);
% скрипт эксперимента
clear data
data_ind=1;
for fd_ind = 1:size(fd')
for ld = ld_start:ld_step:ld_end
for hd = hd_start:hd_step:hd_end
for f_ind = 1:size(f')
data(data_ind,1)=data_ind;
data(data_ind,2)=fd(fd_ind);
data(data_ind,3)=ld;
data(data_ind,4)=hd;
data(data_ind,5)=f(f_ind);
x_ind=1
for x = x_start:x_step:x_end
flclear fem
% Application mode 1
clear appl
appl.mode.class = 'AzimuthalCurrents';
appl.mode.type = 'axi';
appl.module = 'ACDC';
appl.assignsuffix = '_emqa';
clear prop
prop.analysis='transient';
appl.prop = prop;
clear pnt
pnt.I0 = {};
pnt.name = {};
pnt.ind = [];
appl.pnt = pnt;
clear bnd
bnd.chsrcdst = {};
bnd.murbnd = {};
bnd.sigmabnd = {};
bnd.eta = {};
bnd.d = {};
bnd.index = {};
bnd.Esphi = {};
bnd.pertype = {};
bnd.type = {};
bnd.A0phi = {};
bnd.name = {};
bnd.H0 = {};
bnd.Js0phi = {};
bnd.epsilonrbnd = {};
bnd.murext = {};
bnd.ind = [];
appl.bnd = bnd;
clear equ
equ.Vloop = {};
equ.Sd = {};
equ.magconstrel = {};
equ.srcpnt = {};
equ.M = {};
equ.S0 = {};
equ.Pphi = {};
equ.gporder = {};
equ.coordOn = {};
equ.sigma = {};
equ.name = {};
equ.epsilonr = {};
equ.rOn = {};
equ.dr = {};
equ.cporder = {};
equ.mur = {};
equ.normfH = {};
equ.Br = {};
equ.init = {};
equ.Stype = {};
equ.Drphi = {};
equ.R0 = {};
equ.elconstrel = {};
equ.fH = {};
equ.v = {};
equ.Jephi = {};
equ.usage = {};
equ.srcaxis = {};
equ.user = {};
equ.ind = [];
appl.equ = equ;
fem.appl{1} = appl;
fem.sdim = {'r','z'};
fem.frame = {'ref'};
fem.border = 1;
clear units;
units.basesystem = 'SI';
fem.units = units;
air1 = rect2(air1H,L,'base','center', 'pos', [air1H/2+OKD 0]);
OK = rect2(OKH,L,'base','center','pos', [-(OKH/2)+OKD 0]);
air2 = rect2(air2H,L, 'base','center','pos', [-(OKH+air2H/2)+OKD 0]);
kat1 = rect2(H_k,l_k, 'base','center','pos', [delta_k+(H_k/2)+OKD -((D_k/2)+(l_k/2))]);
kat2 = rect2(H_k,l_k, 'base','center','pos', [delta_k+(H_k/2)+OKD ((D_k/2)+(l_k/2))]);
p1=point2(OKD+delta_izm,0);
defect = geomcoerce('solid',{curve2([0+OKD-OKH 0+OKD-OKH],[x-(ld/2) x+(ld/2)]),...
curve2([0+OKD-OKH hd+OKD-OKH],[x+(ld/2) x+(ld*fd(fd_ind)/2)]),...
curve2([hd+OKD-OKH hd+OKD-OKH],[x+(ld*fd(fd_ind)/2) x-(ld*fd(fd_ind)/2)]),...
curve2([hd+OKD-OKH 0+OKD-OKH],[x-(ld*fd(fd_ind)/2) x-(ld/2)])});
clear s p
p.objs={p1};
p.name={'p1'};
s.objs={air1,air2,OK,kat1,kat2,defect};
s.name={'air1','air2','OK','kat1','kat2','defect'};
draw=struct('s',s,'p',p);
fem.geom = geomcsg(draw);
fem.mesh=meshinit(fem,...
'hmax',0.5e-3,...
'hmaxvtx',[11,0.05e-3],...
'hmaxedg',[4,0.2e-3,6,0.0001,7,0.0001,8,0.2e-3,9,0.0001,11,0.0001,12,0.2e-3,15,0.0001,16,0.0001,17,0.0001,18,0.0001,19,0.0001,20,0.0001,21,0.0001,22,0.0001],...
'hmaxsub',[2,0.2e-3]);
% Application mode 1
clear appl
appl.mode.class = 'AzimuthalCurrents';
appl.mode.type = 'axi';
appl.dim = {'Aphi','redAphi'};
appl.sdim = {'x','z','y'};
appl.module = 'ACDC';
appl.sshape = 2;
appl.assignsuffix = '_emqa';
clear prop
prop.analysis='harmonic';
appl.prop = prop;
clear bnd
bnd.type = {'A0','cont','ax'};
bnd.ind = [3,1,1,2,1,2,2,2,2,1,2,2,1,1,2,2,2,2,2,2,2,2,1];
appl.bnd = bnd;
clear equ
equ.sigma = {0,2e6,0,0};
equ.Jephi = {0,0,1e6,1e6};
equ.ind = [1,2,1,1,3,4];
appl.equ = equ;
appl.var = {'nu',f(f_ind)};
fem.appl{1} = appl;
fem.border = 1;
% Multiphysics
fem=multiphysics(fem);
% Extend mesh
fem.xmesh=meshextend(fem);
% Solve problem
fem.sol=femstatic(fem,...
'solcomp',{'Aphi'},...
'outcomp',{'Aphi'},...
'blocksize','auto',...
'ntol',1e-012);
% Integrate
data(data_ind,5+x_ind)=-postint(fem,'Br_emqa',...
'unit','T',...
'recover','off',...
'dl',11,...
'edim',0)*i*2*pi*data(data_ind,5)*pi*r^2;
data(data_ind,5+(2*x_size)-x_ind)=-data(data_ind,5+x_ind);
x_ind=x_ind+1;
end
data_ind
end
end
end
end
Приложение 2
Программа, написанная в среде MatLab для расчета информативных признаков по сформированной базе сигналов.
function [y] = prizn (P)
for k=1:5
for w=1:100
y(k,w)=P(k,w);
end;
end;
% k-ctro4ki
% w-ctolbci
for k=6:46
for w=1:100
Z(k,w)=P(k,w);
end;
end;
for w=1:100
for k=6:46
g(k)=Z(k,w);
end;
rez=real(g);
imz=imag(g);
rez=abs(rez);
imz=abs(imz);
mre=max(rez); %mre - max resistanse
for k=6:46
if mre==rez(k)
mr=k; %mr - max resistance index
k=46;
end
end
maxres=g(mr); %maxres - max resistance point (F1)
mrea=angle(maxres);
mrea=(180/pi)*mrea; %mrea - max resistance angle (F2)
y(6,w)=mre;
y(7,w)=mrea;
mim=max(imz); %max reactance
for k=6:46
if mim==imz(k)
mi=k; %mi - max reactance index
k=46;
end
end
maxreact=g(mi); %maxreact - max reactance point (F3)
mima=angle(maxreact);
mima=(180/pi)*mima; %mima - max reactance angle (F4)
y(8,w)=mim;
y(9,w)=mima;
absz=abs(g);
maxz=max(absz); %mabs - max impedance
for k=6:46
if maxz==absz(k)
mz=k; %mz - max impedance index
k=46;
end
end
maximp=g(mz); %maximp - max impedance point (F5)
mimpa=angle(maximp);
mimpa=(180/pi)*mimpa; %mimpa - max impedance angle (F6)
y(10,w)=maxz;
y(11,w)=mimpa;
stang=angle(g(6));
stang=(180/pi)*stang; %stang - starting angle (F7)
endang=angle(g(46));
endang=(180/pi)*endang; %endang - ending angle (F8)
y(12,w)=stang;
y(13,w)=endang;
c=sqrt( ( (real(g(mz))-real(g(mz-1)) )^2) +((imag(g(mz))-imag(g(mz-1)))^2));
b=sqrt(((real(g(mz+1))-real(g(mz)))^2)+((imag(g(mz+1))-imag(g(mz)))^2));
a=sqrt(((real(g(mz+1))-real(g(mz-1)))^2)+((imag(g(mz+1))-imag(g(mz-1)))^2));
turnang=acos(((b^2)+(c^2)-(a^2))/(2*b*c));
turnang=(180/pi)*turnang;
% turnang - turning fase angle at the point of max impedance (F9)
y(14,w)=turnang;
L(1)=sqrt( ((real(g(6)))^2) +((imag(g(6)))^2));
for k=7:46
L(k)=sqrt( ( (real(g(k))-real(g(k-1)) )^2) +((imag(g(k))-imag(g(k-1)))^2));
end
L(47)=sqrt( ( (real(g(46)))^2) +((imag(g(46)))^2));
for k=1:mr
L1(k)=L(k);
end
mrlen=sum(L1); %mrlen - length up to the max resistance point (F10)
totlen=sum(L); %totlen - total length (F11)
y(15,w)=mrlen;
y(16,w)=totlen;
end;
Похожие работы

... генерального директора — главный инженер ОАО «Научно-исследовательский институт технологии, контроля и диагностики железнодорожного транспорта», кандидат технических наук В.Л. ЛАЗАРЕВ, главный конструктор Проектно-конструкторского бюро локомотивного хозяйства ОАО «РЖД» Н.Ю. ИЛЬЮЩЕНКОВА, начальник сектора неразрушающего контроля Проектно-конструкторского бюро вагонного хозяйства ОАО «РЖД» На ...

... , однако в последнем случае нанесение и индикацию пробных веществ выполняют по разные стороны перегородки. 2 Классификация физических методов неразрушающего контроля сварных соединений. Метрологическое обеспечение средств контроля При проведении мониторинга технического состояния (ТС) изделий, одной из наиболее актуальных является задача объективного своевременного обнаружения дефектов ...
... и цельнокатаные колеса, коленчатые валы дизелей и компрессоров, детали тяговых передач локомотивов. .) контролируется акустическими методами. На их долю приходится 35-40% общего объема операций неразрушающего контроля, выполняемых при изготовлении и ремонте подвижного состава. Применение системы акустических методов НК наряду с другими позволило обеспечить безопасность движения на железнодорожном ...
... при наличии автоматической приставки. Широко используют также дефектоскопы типа АСК-10(12), ИОС-1, ВК-ЗОС, ВД-20П, ИПП-1М, «Магнитоскоп» и др. Тепловые методы Тепловые методы неразрушающего контроля используют при исследовании тепловых процессов в РЭС, причем в большинстве случаев регистрируют поверхностное тепловое или температурное поле объекта контроля, в пространственно-временной ...
0 комментариев