Навигация
Характеристики аналитического сигнала
19151
знак
0
таблиц
6
изображений
5 Характеристики аналитического сигнала
Огибающая и мгновенная фаза сигналов. Допустим, что имеем зарегистрированный радиоимпульсный сигнал x(t) с несущей частотой o, который содержит определенную информацию, заключенную в огибающей сигнала u(t) и его фазе (t):
x(t) = u(t) cos (ot+(t)). (.15)
Требуется выделить информационные составляющие сигнала
Запишем выражение (16.2.1) в другой форме:
x(t) = a(t)×cos(ot) + b(t)×sin(ot), (16)
где функции a(t) и b(t) называются низкочастотными квадратурными составляющими сигнала x(t):
a(t) = u(t) cos t, b(t) = u(t) sin t.
u(t) =![]() , tg (t) = b(t)/a(t).
, tg (t) = b(t)/a(t).
С использованием преобразования Гильберта из сигнала x(t) можно сформировать аналитически сопряженный сигнал ![]() (t). Математическую форму сигнала
(t). Математическую форму сигнала ![]() (t) получим из выражения (16) с учетом свойства модуляции преобразования Гильберта:
(t) получим из выражения (16) с учетом свойства модуляции преобразования Гильберта:
![]() (t) = a(t)×sin(оt) – b(t)×cos(ot).
(t) = a(t)×sin(оt) – b(t)×cos(ot).
z(t) = x(t) + j×![]() (t).
(t).
Квадрат модуля сигнала z(t):
|z(t)|2 = x2(t)+![]() 2(t) = a2(t)[cos2(t)+sin2(ot)] + b2(t)[cos2(t)+sin2(ot)] = u2(t).
2(t) = a2(t)[cos2(t)+sin2(ot)] + b2(t)[cos2(t)+sin2(ot)] = u2(t).
Отсюда, огибающая u(t) и мгновенная фаза (t) сигнала x(t):
u(t) =![]() . (17)
. (17)
tot+(t) = arctg[![]() (t)/x(t)]. (18)
(t)/x(t)]. (18)
Наглядно эти характеристики можно увидеть на Рис 4
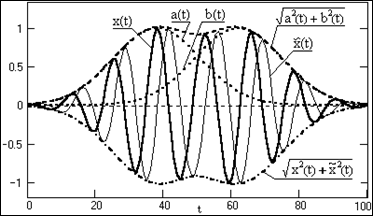
Рис 4
Мгновенная частота сигнала определяется по скорости изменения мгновенной фазы:
d(t)/dt =![]() =
=![]() (19)
(19)
6. Ценность модели аналитического сигнала
Аналитический сигнал позволяет получить аналитическое продолжение функции в верхнюю (нижнюю) полуплоскость комплексной переменной z, с чем и связано название аналитического сигнала.
Это значит, что узкополосный сигнал можно представить в виде:
![]() и произведя соответсвующую обработку
и произведя соответсвующую обработку ![]() выделить низкочастотный эквивалент.
выделить низкочастотный эквивалент.
Вопрос 2.
1. Задачи, решаемые системами радиоуправления
Системой радиоуправления будем называть комплекс разных технических средств, содержащий радиотехнические устройства и используемый для решения задач управления. Особенность систем управления, использующих радиосредства, состоит в том, что их отдельные элементы или звенья находятся, как правило, на значительном удалении друг от друга, поэтому управление исполнительными механизмами в них ведется на расстоянии. Такое управление в настоящее время все более используется на транспорте, в энергетике, промышленности и особенно широко в оборонной технике.
Основной задачей, решаемой с помощью систем радиоуправления в оборонной технике, является управление полетом беспилотных летательных аппаратов. В настоящее время известен достаточно широкий перечень беспилотных аппаратов самого разного назначения — от обычного самолета, совершающего автоматическую посадку на аэродром при отсутствии видимости, до космических ракет и межпланетных автоматических станций, контроль движения и коррекции орбит которых осуществляются с помощью систем радиоуправления. Все задачи, с которыми приходится встречаться при радиоуправлении полетом, можно разделить на две основные группы.
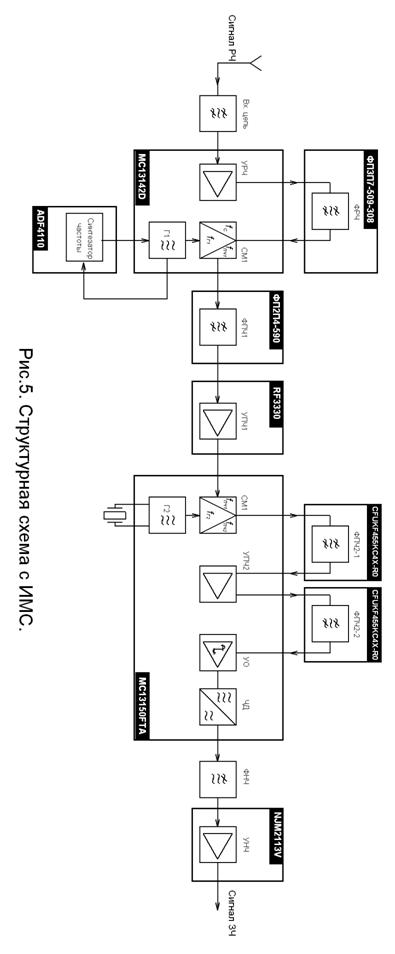
Первая задача — это задача движения беспилотного аппарата по заданной, т. е. вычисленной и поэтому известной траектории. Такие траектории принято называть фиксированными или опорными. Система радиоуправления в этом случае должна контролировать действительную траекторию движения, сравнивать ее с заданной и в случае их несовпадения (что обычно и имеет место) вырабатывать и передавать на борт беспилотного аппарата корректирующие команды. (Рис 5)

Рис 5 Схема наведения самолета-снаряда на цель по фиксированной траектории.
Радиоуправление, построенное по такому принципу, называют корректирующим радиоуправлением.
В качестве примеров можно привести радпоуправление полетом баллистической ракеты на активном участке траектории, выведение на заданную траекторию искусственного спутника Земли, коррекцию траектории межпланетной автоматической станции. При решении любой из этих задач опорные траектории известны. Действительно, при запуске баллистической ракеты известны координаты места старта и цели, а потому может быть заранее рассчитана траектория полета . При выведении на орбиту искусственного спутника Земли известно место старта и орбита, на которую он выводится, а в случае коррекции траектории межпланетной станции — взаимное положение планет и траектория ее движения.
Вторая задача — это задача сближения управляемого снаряда с движущейся и маневрирующей целью. Задать для снаряда траекторию в этом случае нельзя, так как цель движется и при маневрировании меняет свою траекторию достаточно произвольно. В такой ситуации может быть выбран только характер или способ сближения управляемого снаряда с целью. Конкретная форма траектории при выбранном методе сближения формируется в самом процессе полета и зависит от движения цели и движения пункта управления, если он подвижен. Управление снарядом при этом возможно с помощью команд, передаваемых по радиоканалу с земли, самолета, корабля или с помощью системы самонаведения.
Поскольку управление снарядом осуществляется на большом расстоянии, необходимо следить на таких расстояниях за движениями самолета и снаряда, а также корректировать полет перехватчика, осуществляя это с помощью радиосредств. Радиоуправление, в основу которого положено слежение за движением цели и снаряда и последующая корректировка полета называют следящим радиоуправлением.
Очень широко комплексы радиоуправления используются в работах по исследованию космического пространства. Радиоканалы используются в системах передачи из космоса телеметрической информации, телевизионных изображений и для решения многих других задач.
2. Способы радиоуправления полетом
Известны следующие основные способы управления полетом беспилотных объектов.
1. Автономное управление.
2. Управление по командам, формируемым с помощью специалыиого пункта наведения.
З. Самонаведение.
4. Комбинированное управление.
Управление полетом принято называть автономным, когда оно полностью осуществляется с помощью аппаратуры, расположенной на борту снаряда. Никаких управляющих сигналов с места старта или сигналов, связанных с определенными признаками цели, на борт снаряда при автономном управлении не поступает. Программа полета устанавливается заранее и полностью контролируется только аппаратурой на борту. Принципы работы этой аппаратуры основаны на использовании свойств гироскопов или на применении элементов, чувствительных к изучению звезд, гравитационному или магнитному полям Земли.
Используется автономное управление при неподвижных целях, координаты которых известны. Траектория полета при этом может быть заранее рассчитана и заложена в программу движения.
Управление полетом по командам, формируемым с помощью специального пункта наведения, осуществляется только с использованием радиотехнических средств. Системы управления при этом могут быть построены по методам радиотеленаведения и радиотелеуправления.
При радиотеленаведении передающими станциями пункта в зоне полета беспилотного объекта создается электромагнитное поле или радиозона определенной структуры. В каждой точке пространства параметры этого поля содержат информацию о направлении на цель. На управляемом снаряде ставится радиоприемное устройство, с помощью которого эта информация может быть выделена и использована далее для управления полетом. Пункт наведения никаких команд при этом не отрабатывает, он только формирует радиозону. Команды управления синтезируются непосредственно на борту снаряда.
Основной особенностью радиотелеуправления как способа наведения является синтезирование команд управления полетом на пункте управления и их последующая передача по радиолинии на борт беспилотного объекта. Для формирования команд управления при радиотелеуправлении ведется непрерывный контроль текущих координат цели и снаряда или контроль других показателей их взаимного положения. На основании оценки положения снаряда относительно цели формируются необходимые команды управления. Эта оценка и формирование команд управления проводятся с помощью специальных электронных вычислительных устройств.
Самонаведение беспилотного аппарата на цель всегда осуществляется с помощью аппаратуры, установленной на его борту. Пункт управления в процессе самонаведения участия не принимает или играет вспомогательную роль. Основным элементом бортовой аппаратуры при самонаведении является приемник сигналов, излучаемых целью. Бортовая аппаратура должна определять пеленг на цель, т. е. направление, с которого поступает сигнал и по найденному пеленгу формировать команды управления. Сигналы, идущие от цели, могут быть акустическими, тепловыми и радиотехническими.
Для управления полетом беспилотных объектов часто используют комбинированные системы. Например, в системах радиоуправления для формирования внутреннего контура всегда используются элементы автономного управления. На разных участках траектории обычно используются разные способы управления полетом, для того, чтобы наиболее полно реализовать их преимущества. Возможна комбинация автономного управления с самонаведением по рассеянному отражению радиоволн от поверхности Земли. Такие системы иногда называют системами автономного радиоуправления и используют для наведения беспилотных объектов по фиксированным траекториям.
3. Показатели качества системы управления
Основными качествами, которыми должны обладать системы радиоуправления, определяются назначением систем.
Из обобщенных требований можно выделить эксплуатационные, тактико-технические и конструкционные. Наиболее важным эксплуатационным требованием следует считать безотказность или надежность работы всех элементов систем радиоуправления в заданных метеорологических и климатических условиях. Важность этого условия связана с тем, что в настоящее время развитие техники радиоуправления идет в основном по пути увеличения точности и внедрения в системы управления быстродействующей электронно-вычислительной техники, которая берет на себя все больше функций оператора. Такие системы управления получаются сложными, содержащими много различных элементов. Поскольку отказ хотя бы одного элемента может нарушить работу всей системы, то совершенно необходимо, чтобы отдельные элементы и вся система в целом имели высокую надежность.
Другим важным эксплуатационным качеством является быстрота и безопасность предстартовых операций и проверок отдельных элементов, удобство настройки аппаратуры, автоматизация технического обслуживания.
Основными тактико-техническими качеством являются необходимая дальность и высотность действия при заданной точности. Критерием точности может быть рассмотренная вероятность Р выведения снаряда системой радиоуправления в заданную область плоскости или пространства. Такой критерий позволяет иметь объективную числовую характеристику качества системы радиоуправления, однако эта характеристика не является всесторонней. Например, систему радиоуправления можно сделать очень точной, но если при этом не учесть требований простоты и надежности, система окажется сложной и поэтому неработоспособной. Кроме того, усложнение и увеличение веса аппаратуры управления на борту снаряда приводит к уменьшению веса боевого заряда. В результате такая точная система может оказаться менее эффективной, чем система менее точная, но более простая.
Показателем эффективности систем радиоуправления установлен к соответствии с назначением управляемого снаряда. В качестве такого критерия выбрана вероятность поражения цели. Этот критерий учитывает основные особенности всего комплекса управления и поддается вычислению по формуле:
![]()
В правой части формулы записано произведение следующих сомножителей:
Р1 — вероятность обнаружения цели и ее захвата на автосопровождение радиолокационной станцией слежения. Эта вероятность характеризует совершенство комплекса радиолокационных средств в системе управления. В случае фиксированной траектории снаряда Р==1; Р2 — вероятность безотказной работы системы радиоуправления в течение определенного интервала времени. Это ее надежность. (Р1*Р2=О,7—О,8 )
Р3 — вероятность доставки технически исправного снаряда в заданный район цели с ошибкой, не превышающей допустимую.;
Р4 — вероятность того, что управляемый снаряд в полете не будет выведен из строя действиями противника. Она определяется эффективностью оказываемого противодействия;
Р5 — вероятность уничтожения цели снарядом, выведенным с допустимым промахом в заданный район. Она зависит от боевого заряда, свойств взрывателя и уязвимости цели.
Вероятность поражения цели является наиболее полной тактико-технической характеристикой, позволяющей давать количественную оценку системам радиоуправления и сравнивать их между собой.
К показателям качества системы относят так же конструкционные требования. Вся бортовая аппаратура должна иметь минимальные габариты и вес, выдерживать значение перегрузок, быть вибростойкой. Необходимо, чтобы аппаратура работала в широком диапазоне температур, влажности и давления.
Похожие работы
... РАССМОТРЕНИЕ РАЗЛИЧНЫХ ВАРИАНТОВ ПОСТРОЕНИЯ СТРУКТУРНОЙ СХЕМЫ Исходя из назначения устройства, можно представить устройство в виде некоего блока, который обеспечивает пространственно-временную коммутацию 256ти входящих цифровых каналов, в соответствии с сигналами УСТРОЙСТВА УПРАВЛЕНИЯ, и выравнивает входящие групповые каналы по циклам. Структурная схема такого устройства показана на рисунке 3.1. ...
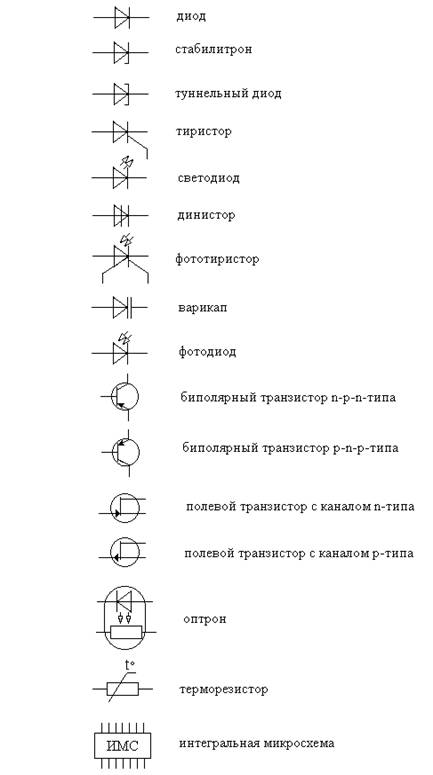
... интегральным микросхемам. Они позволяют выполнять логическую обработку большого числа сигналов, воспроизводить сложные функции усиления, генерации и преобразования электрических сигналов. Тиристор – электропреобразовательный полупроводниковый прибор, содержащий три или более р-п-перехода. По числу внешних электродов тиристоры делятся на: двухэлектродные – динисторы и трехэлектродные – тринисторы. ...
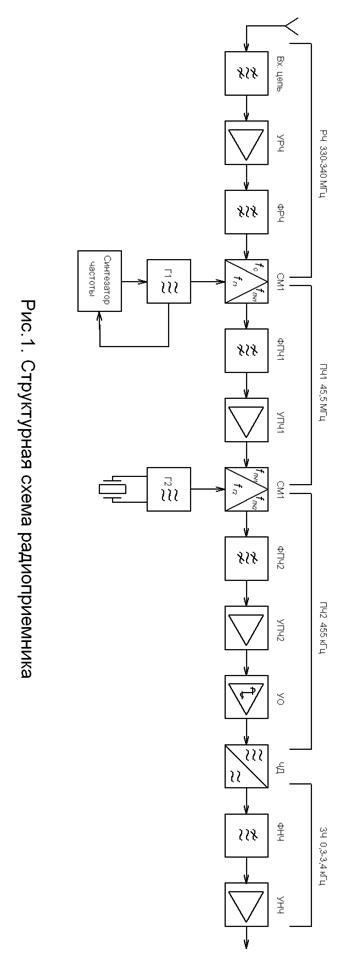
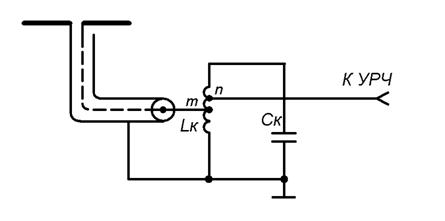
... . Поэтому супергетеродинный метод радиоприема, являющийся в настоящее время основным, и предложен для реализации в данном курсовом проекте. 1. Анализ задания, определение требований к приемнику Выбор промежуточной частоты (частот) приемник диспетчерская радиостанция В связи с тем, что заданный диапазон частоты сигнала 330-340 МГц лежит в УКВ диапазоне, выберу число преобразований частоты ...
... основу для эффективного управления сетью. Однако NMC обладает и другими преимуществами : централизованное администрирование, стандартные интерфейсы с другими работающими системами или типами АТС, система разработки ПО для усиления первоначальных возможностей NMC. Централизованная эксплуатация и техобслуживание означает, что все местное администрирование АТС может проводиться c помощью ...
0 комментариев