Навигация
6. Аппроксимация
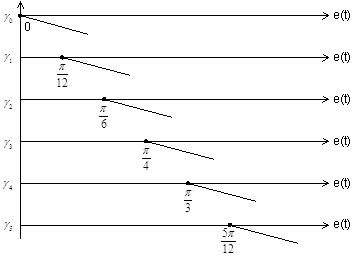

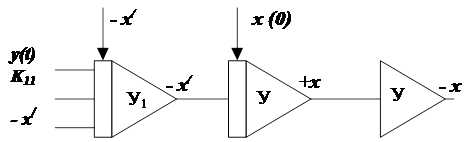
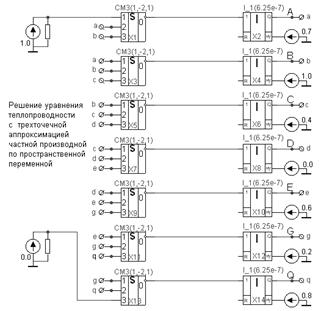
Рисунок 3.1 – Схема решения уравнения

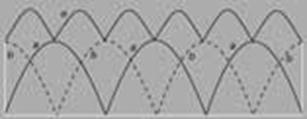
Рисунок 3.2 – Блок-схема формирования нелинейной функции
Таким образом, автоматически формируется левая часть уравнения. При этом условно считается, что старшая производная x// известна, поскольку члены правой части уравнения известны и могут быть подключены к входам У1 (рисунок 3.1). Операционный усилитель У3 выполняет роль инвертора сигнала +х. Для моделирования x// необходимо в схему ввести еще один підсумовуючий усилитель, на входы которого необходимо подать сигналы, которые моделируют правую часть уравнения (3.2).
Рассчитываются масштабы всех переменных с учетом того, что максимальная величина машинной переменной за абсолютной величиной равняется 10 В:
Mx = 10 / xmax; Mx/ = 10 / x/ max; Mx// = 10 / x //max;
My = 10 / ymax. (3.3)
Масштаб времени Mt = T / tmax = 1, поскольку моделирование задачи осуществляется в реальном масштабе времени.
Рассчитываются коэффициенты передачи по каждому входу интегрирующих усилителей.
Для усилителя У1 коэффициенты передачи находятся за формулами:
K11 = Mx/ b / (MyMt); K12 = Mx/ a2 / (MxMt);
K13 = Mx/ a1 / (MxMt). (3.4)
Для усилителя У2:
K21 = Mx/ / (Mx/ Mt), (3.5)
и для усилителя У3:
К31 = 1. (3.6)
Напряжения начальных условий вычисляются за формулами:
ux/ (0) = Mx/ x/ (0) (-1); ux(0)= Mxx(0) (+1). (3.7)
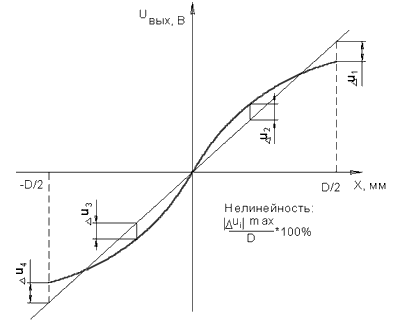
Правая часть уравнения (3.2) представлена нелинейной функцией, которая задается путем линейной аппроксимации. При этом необходимо проверять, чтобы погрешность аппроксимации не превышала заданную величину. Блок-схема формирования нелинейной функции представлена на рисунку 3.2.
7. Описание принципиальной схемы
Блок формирования функции времени (Ф) выполняется в виде одного (для формирования t) или двух последовательно соединенных (для формирования t2) интегрирующих усилителей с нулевыми начальными условиями.
В этом случае при подаче на вход первого интегратора сигнала U, на его выходе получим:
u1(t)= – K11 = – K11Et. (3.8)
Положив K11E=1, имеем u1(t)= t.
На выходе второго интегратора получим:
u2(t)= K21 = K11K21Et2 / 2 (3.9)
Положив K11K21E/2 = 1, имеем u2(t)= t2.
Блоки формирования отрезков аппроксимирующей функции реализуются в виде диодных блоков нелинейных функций (ДБНФ), входной величиной для которых является функция времени t или t2. Порядок расчета и построения ДБНФ приведенные в [1, с. 59 – 69].
Сумматор (ГРУСТЬ) отрезков аппроксимирующей функции выполняется в виде дифференциального итогового усилителя.
Начальные условия для интеграторов моделирующей схемы вводятся с помощью узла с переменной структурой (рисунок 3.3). Эта схема может работать в двух режимах:
а) интегрирование – при положении ключа К в позиции 1. При этом исходный сигнал схемы с достаточной точностью описывается уравнением идеального интегратора:
u1(t)= – (1 / RC) . (3.10)
Этот режим используется при моделирование задачи. Для проверки правильности выбора параметров R и C интегратора проверяют величину исходного напряжения интегратора в функции времени и полезное время интегрирования в пределах допустимой ошибки ?Uдоп.
Величина исходного напряжения интегратора
U(t)= – KYE {1 – e – Т / [(Ky+1)RC} (3.11)
за время моделирования Т при интегрировании входного сигнала E с использованием операционного усилителя с коэффициентом передачи Ky без цепи обратной связи не должна превышать значения машинной переменной (10 В).
Время интегрирования
Tи = 2RC(Kу + 1)?Uдоп (3.12)
при выбранных параметрах схемы не должен быть меньше, чем время моделирования Т.
б) задание начальных условий реализуется при переводі ключа К в положение 2. Этот режим используется при подготовке моделирующей схемы к процессу решения. При этом исходный сигнал схемы описывается уравнением:
u0(t)= – (R2 /R1) E (3.13)
где u0(t) – величина начальных условий.
С целью сокращения времени формирования начальных условий и обеспечение надежной работы, параметры схемы должны удовлетворять условие: R1C1 = R2C.
Построить полную расчетную схему. При этом следует пользоваться условными обозначениями, приведенными в подразделе 3.1.
Пользуясь разрядностью входных и исходных данных, построить принципиальные схемы блоков Б1 и Б2 и соединить их с блоком РС.
Вывод
В ходе работы над курсовым проектом по дисциплине «Аналоговые и гибридные ЭВМ» были закреплены основные теоретические знания и практические навыки, включающие задачи анализа и синтеза формул и схем.
В результате выполнения данной работы были приобретены практические навыки при программировании задач и проектировании принципиальных схем аналого-цифровых устройств вычислительной техники. Были построены функциональная схема, которая реализует решение дифференциального уравнения, и принципиальная схема полученного входе решения устройства.
Список литературы
1. Применение интегральных микросхем в электронной вычислительной технике: Cправочник; Под ред. Б.Н. Файзулаева, Б.В. Тарабрина. – М.: Радио и связь, 1986.
2. Анисимов Б.В., Голубкин В.Н., Петраков С.В. Аналоговые и гибридные ЭВМ. – М.: Высшая школа., 1986.
3. Гутников Б.Г. Телец В.А. Интегральная электроника в измерительных устройствах. – Л.: Энергоатомиздат, 1988.
4. Федорков Б.Г. Телец В.А. Микросхемы ЦАП и АЦП: функционирование, параметры, применение. М.: Энергоатомиздат, 1988.
Похожие работы
... . Результаты моделирования можно просматривать на экране монитора и распечатывать на принтере. В данном расчетно-графическом задании виртуальная гибридная вычислительная машина будет использована в качестве вычислительного инструмента для решения краевых задач методами математического и аналогового моделирования, с целью демонстрации возможностей аналоговых устройств для исследования физических ...
... предприятием аналоговых мини-АТС. ЗАКЛЮЧЕНИЕ В представленной дипломной работе рассмотрена возможность использования мирового опыта по проектированию и строительству офисных телекоммуникационных сетей на базе систем микросотовой связи стандарта DECT фирмой ООО «Сибирь-связь» (г. Красноярск) при оказании услуг по телефонизации офисов. Проведено изучение действующих стандартов используемых при ...

... программы и высокой точности обработки деталей); система программного управления реверсивным прокатным станом, включающая в свой контур управляющую вычислительную машину. В относительно медленных технологических процессах в химической и нефтяной промышленности распространены многосвязные САУ, осуществляющие регулирование большого количества связанных величин; так, при перегонке нефти информация о ...

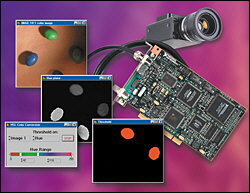


... плата ввода/вывода. Она необходима для подключения дополнительного оборудования, сбора информации с датчиков и обрабатывание ее. ПРИМЕНЕНИЕ. Системы "машинного зрения" применяются в следующих областях промышленности: · Автомобилестроение. · Электроннике. · Медицинской и фармацевтической. · Машиностроении. · Робототехнике. · ...
0 комментариев