Навигация
Участок – высокочастотный. Лучше иметь возможно больший наклон высокочастотных асимптот, что уменьшит требуемую мощность используемых органов
38653
знака
27
таблиц
32
изображения
3 участок – высокочастотный. Лучше иметь возможно больший наклон высокочастотных асимптот, что уменьшит требуемую мощность используемых органов.
Построение низкочастотного участка
Низкочастотный участок строится с использованием требований к качеству системы в установившемся режиме.
Чтобы гармонический входной сигнал воспроизводился системой с ошибкой, не превышающей em, низкочастотный участок ЛАЧХ желаемой системы должен проходить выше контрольной точки Ак(wк, Lк)
Первые две асимптоты располагаются так, что через контрольную точку Акпроходит первая асимптота. При этом коэффициент усиления будет иметь минимальную возможную величину, равную предельному значению, что является благоприятным.
![]() с-1.
с-1.
Однако частота точки пересечения второй асимптоты с осью нуля децибел w0 будет значительно больше минимального. Это является нежелательным, т. к. вся ЛАХ будет сдвигаться в область высоких частот.
Таким образом, мы сдвигаем первую частоту сопряжения и совмещаем ее с частотой wа. Отсюда находим первую постоянную времени желаемой ЛАХ
![]() с
с
Для того, чтобы реальная ЛАХ не заходила в запретную область при w=wk, приподнимаем ЛАХ на 3 дБ.
Построение среднечастотного участка.
Среднечастотный участок определяет устойчивость, запасы устойчивости и качество переходного процесса. Данный участок характеризуется двумя параметрами: частотой среза ![]() и наклоном асимптоты. Чем больше частота среза, тем выше быстродействие системы, тем меньше время регулирования tp. Наиболее целесообразно брать наклон асимптоты –20 дБ/дек, так как чем больше наклон асимптоты, тем сложнее обеспечить хорошие динамические свойства системы.
и наклоном асимптоты. Чем больше частота среза, тем выше быстродействие системы, тем меньше время регулирования tp. Наиболее целесообразно брать наклон асимптоты –20 дБ/дек, так как чем больше наклон асимптоты, тем сложнее обеспечить хорошие динамические свойства системы.
Т.к. заданы прямые показатели качества, то воспользуемся методом Солодовникова В.В. Для нахождения ![]() используем готовые номограммы.
используем готовые номограммы.
![]() ;
;
![]()
Выбираем частоту среза
![]()
Чем больше wc, тем более быстродействующая будет система; чем меньше wc, тем проще корректирующее устройство.
Выбираем wc=0.9wп=![]()
На оси logw отмечаем точку, соответствующую частоте среза wc,и через нее проводим прямую с наклоном -20дБ/дек. Эта прямая будет среднечастотной асимптотой желаемой ЛАХ.
Избыток фаз определяем в соответствии с заданным перерегулированием. Значение L1 находим из номограммы, для ![]() ; L1=25дБ.
; L1=25дБ.
Среднечастотный участок проводим вправо до достижения L1=-25дБ. Это значение достигается при logw3>logwc дек. Поэтому совмещаем частоту w3 с частотой wс, для упрощения корректирующего устройства. Избыток фаз незначительно уменьшится, но это незначительно повлияет на перерегулирование системы.
Левая граница определяется сопряжением среднечастотного и низкочастотного участков. Из Рисунка видно, что сопряжение участков происходит при logw2=1,42 дек. Следовательно, частота сопряжения w2= 26,303с-1.
Высокочастотные асимптоты желаемой ЛАЧХ выполняем параллельными высокочастотным асимптотам ЛАЧХ исходной системы. То есть, на частоте wс наклон становится -80дБ/дек.
Желаемая ЛАХ представлена на миллиметровке.
Корректирующие звенья могут вводиться в систему различными способами: а) последовательно; б) параллельно; в) в виде местной обратной связи.
В данной работе КУ включается последовательно, т. к. в маломощных системах нецелесообразно применение корректирующих устройств, сложность моделей которых соизмерима со сложностью моделей всей системы. Простота - достоинство ПКУ. Но есть и недостаток – эффект коррекции уменьшается с течением времени эксплуатации системы, что связано с изменением элементов параметров системы из-за процессов старения и износа. Поэтому при использовании ПКУ предъявляются жесткие требования к стабильности параметров элементов системы.
Определим передаточную функцию корректирующего устройства последовательного типа по формуле:
![]()
Получим ПФ корректирующего устройства и определим параметры:

где ![]() ,
,
где ![]()
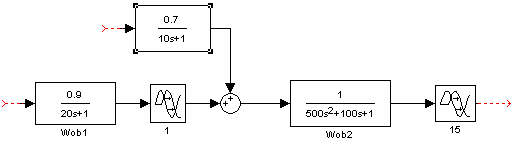
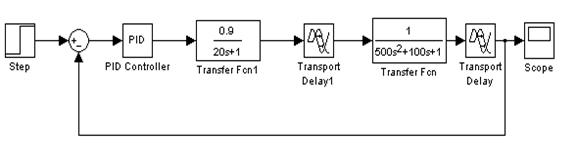
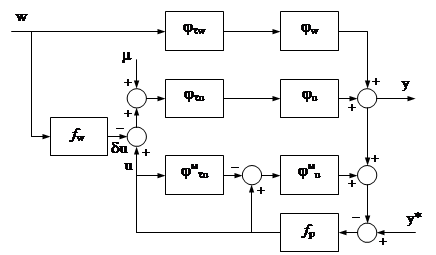
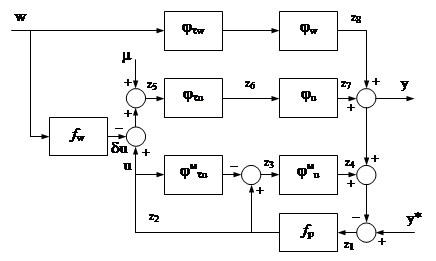
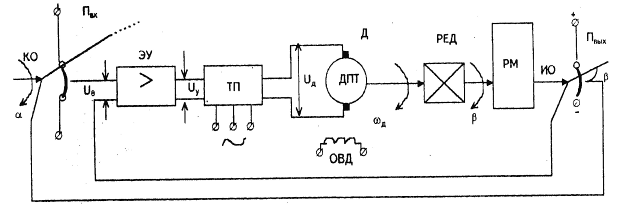
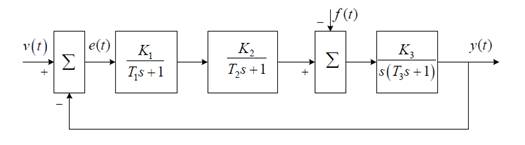
Структурная схема скорректированной системы примет вид

![]() _
_
 | |||||||
|
| ||||||
![]()
![]() Рисунок 1.13 – Структурная схема скорректированной системы
Рисунок 1.13 – Структурная схема скорректированной системы
ЛАХ корректирующего устройства получается при вычитании исходной ЛАХ из желаемой (рисунок на миллиметровке).
![]()
Проверим, соответствует ли система с корректирующим устройством требованиям ТЗ.
Определим ошибку системы.
Относительную динамическую ошибку системы определим как в п. 1.1 по формуле:
![]()
Передаточная функция разомкнутой системы:
![]() (1.10)
(1.10)
Частотная передаточная функция разомкнутой системы:

Тогда, модуль частотной передаточной функции:
![]()
Подставляя значение ωkв формулу для ![]() , находим
, находим ![]()
Относительная динамическая ошибка системы 1,6%, следовательно, скорректированная система удовлетворяет требованиям ТЗ.
Рассмотрим, удовлетворяет ли исходная система требованию по качеству переходного процесса: время регулирования tp- не более 0.25 с, перерегулирование ![]() - не более 20%.
- не более 20%.
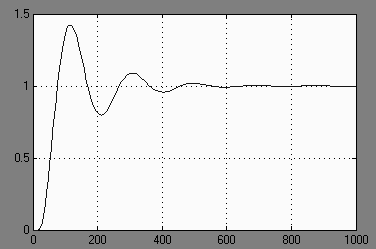
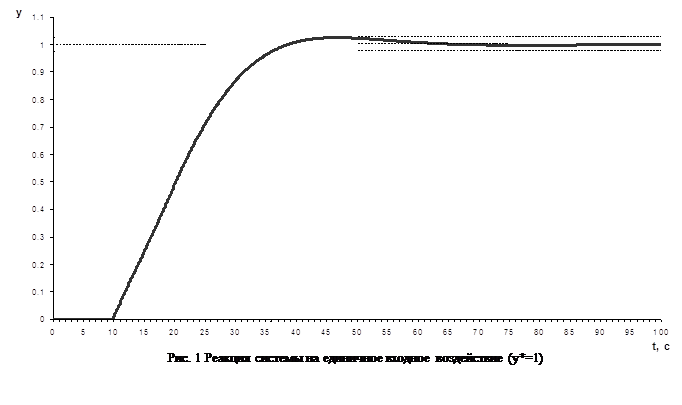
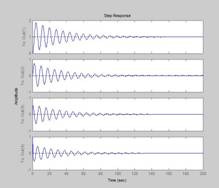
Для проверки величин ![]() и tpпостроим график переходной характеристики исходной системы по выходу ДОС:
и tpпостроим график переходной характеристики исходной системы по выходу ДОС:
![]() ,
,
где ![]() – передаточная функция замкнутой системы по выходу ДОС.
– передаточная функция замкнутой системы по выходу ДОС.
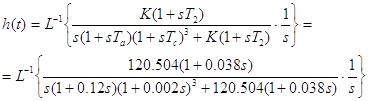
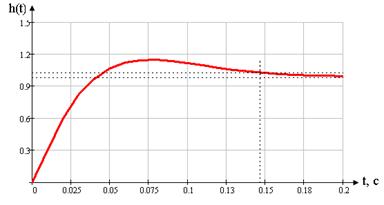
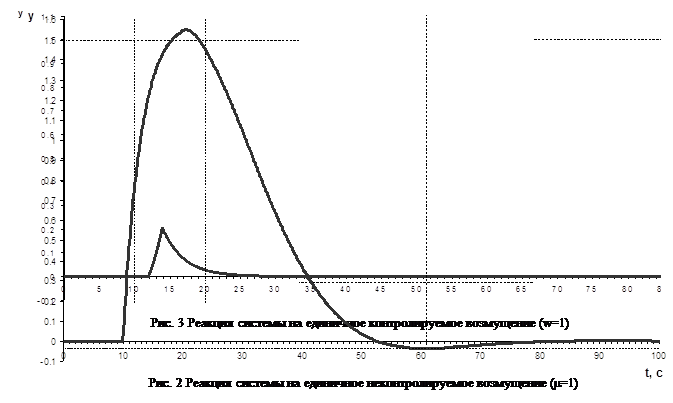
Рисунок 1.14 – График переходной характеристики
![]() ,
,
где hmax=1,188 - максимальное значение регулируемой величины;
![]() =1- установившееся значение регулируемой величины в результате завершения переходного процесса.
=1- установившееся значение регулируемой величины в результате завершения переходного процесса.
Перерегулирование скорректированной системы удовлетворяет ТЗ.
Определим время переходного процесса tp:
построив “коридор” с величину ![]() , из Рисунка 1.14 определяем, что tp=0.147 с.
, из Рисунка 1.14 определяем, что tp=0.147 с.
Временя регулирования tp удовлетворяет требованию ТЗ.
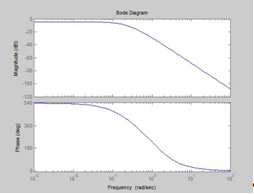
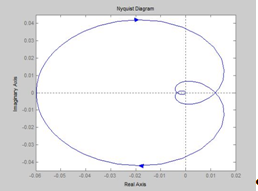
1.4 Анализ скорректированной системы в частотной области
Похожие работы
... регулятор на нелинейный элемент. В качестве нелинейного элемента возьмём идеальное реле, статическая характеристика звена изображена на рисунке 23. Рис.23. Идеальное реле Чтобы реализовать данный регулятор в заданной системе автоматического управления, требуется рассчитать значения параметра с. Проанализируем работу системы с нелинейной характеристикой и без неё в Simulink, а затем найдём ...
... ) формирования регулятором регулирующих воздействий в частности, как задача коррекции в нужном направлении динамических свойств регулятора. При этом рассмотрение схем систем автоматического регулирования производится как на основании структурных соображений, т.е. исходя из характера взаимодействия отдельных элементом системы, определяемых лишь видом математического описания этих элементов, так и в ...

... определению: ; Составим диагональные миноры: ; ; Итак, получаем, что ; ; , т.е. условие устойчивости системы не выполняется, а следовательно система по критерию Гурвица неустойчива. 4.2 Исследование устойчивости САУ по критерию Найквиста В соответствии со структурной схемой (рис.3) АЧХ и ФЧХ разомкнутой САУ можно представить в виде произведения АЧХ и суммы ФЧХ элементарных ...
... записи в Zam_ck=inv(l+sysl)*sysl можно в диалоговом режиме произвести новую запись zpk(.) - сокращая одинаковые элементы числителя и знаменателя в Zam_ck. 2.Исследование линейной импульсной системы автоматического управления Задание: 1) Найти передаточные функции импульсной САУ: W*(z) разомкнутой системы, Ф*(z) – замкнутой системы, Фе*(z) – системы по ошибке. Параметры Т, Т1, τ1, К0, ...
0 комментариев