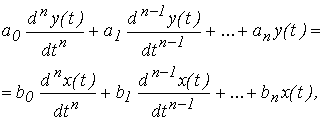
Навигация
Исследование систем автоматического управления (САУ)
19399
знаков
3
таблицы
7
изображений
Курсовая работа
По курсу «Теория автоматического управления»
На тему: «Исследование систем автоматического управления (САУ)»
Задание. 1 вариант
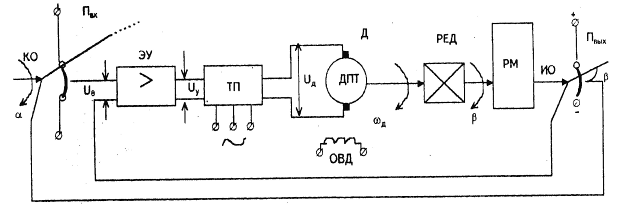
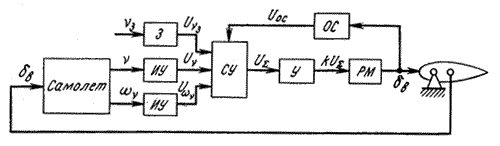
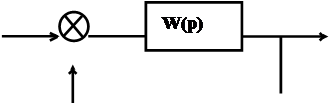
Рис.1 Принципиальная схема САУ
Табл. 1.
| С1, с | Тм, с | Тэ, с | Ттп, с | Кред, | Кд, Рад/Вс | Ктп, | Кэу | Кпот, В/рад |
| 0,04 | 0,833 | 0,02 | 3,33×10-3 | 1/350 | 2,5 | 20 | 35 | 70 |
Обозначения, принятые в таблице 1:
Тэ, Тм - соответственно электромагнитная и электромеханическая постоянная времени двигателя;
Ттп - постоянная времени тиристорного преобразователя;
kред, kд, kтп, kэу, kпот - коэффициенты усиления соответственно редуктора, двигателя Д, тиристорного преобразователя, электронного усилителя, потенциометра.
Значения коэффициентов С2 и СЗ соответственно равны: 0,1 с2 и – 0,15 с3.
1. Основные свойства и функциональное назначение элементов, образующих САУ. Принцип действия САУ
1.1 Основные свойства и функциональное назначение элементов САУ
1.1.1 Двигатель постоянного тока
Двигатель постоянного тока имеет обмотку возбуждения, расположенную на явно выраженных полюсах статора. По обмотке возбуждения проходит постоянный ток, который создает магнитное поле возбуждения. В двигателе размещена двухслойная обмотка, в которой при вращении якоря индуктируется ЭДС. При заданном направлении вращения ЭДС, которое индуктируется в проводниках, зависит только от того, под каким полюсом находится проводник.

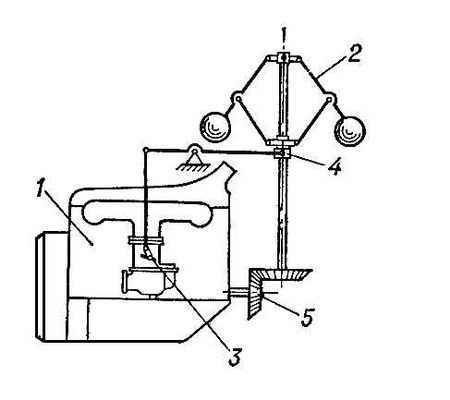
Потенциометрическое измерительное устройство
![]()
![]()
![]()
![]()
Разновидностью информационных электрических микромашин, предназначенных для использования в дистанционных системах передачи угла, является потенциометрическое измерительное устройство. Выходным сигналом (управляемой величиной) является угол поворота вала рабочего механизма b или, что то же самое, угол поворота движка потенциометра Пвых, поскольку этот потенциометр расположен на одном валу с рабочим механизмом (на исполнительной оси ИО), а выходным сигналом – угол поворота a движка потенциометра Пвх, который расположен на командной оси КО.
Алгоритм функционирования рассматриваемого привода заключается в том, чтобы исполнительная ось ИО следила бы за произвольно изменяющимся положением оси КО, т. е. b ( t ) = a (t) при действии на элементы системы различных возмущений, в частности момента статического сопротивления Мс.
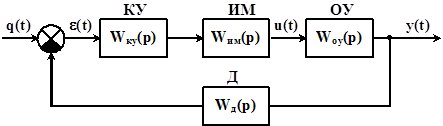
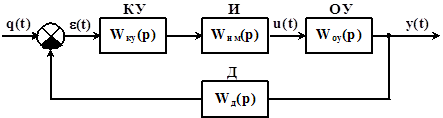
Измерительное устройство системы (потенциометры Пвх и Пвых) определяет угловое рассогласование e(t) между заданным значением угла поворота командной оси a(t) и действительным значением управляемой величины – углом поворота исполнительной оси b(t) и преобразует сигнал
e(t) = a(t) - b(t)
в пропорциональное ему напряжения рассогласования Ue(t), т. е.
Ue(t) = Ua(t) - Ub(t) = Ke[ a(t) - b(t) ] - Ke × e(t)
где Ua , Ub – соответственно потенциалы движков потенциометров Пвх и Пвых ; Кe – коэффициент усиления измерительного устройства (потенциометры Пвх и Пвых имеют одинаковые конструкции и параметры). Затем сигнал Ue (t) усиливается по напряжению и мощности соответственно с помощью УТП и ТП. В результате на выходе регулятора формируется управляющее воздействие – напряжение Uд(t) , которое подводится к якорной обмотке двигателя. Значение управляющего напряжения зависит от величины сигнала рассогласования коэффициентов усиления тиристорного преобразователя Кт.п – и усилителя постоянного тока Купт.
1.1.3 Электронный усилитель
Электронный усилитель – устройство, предназначенное для повышения мощности входного электрического сигнала. При этом усиление маломощного входного сигнала достигается за счет энергии внешнего источника питания значительно большего уровня мощности. Структурная схема усилителя показана в виде активного четырёхполюсника, к входным зажимам которого подключается источник входного сигнала в виде источника напряжения. Сопротивление нагрузки Rн подключается к выходным зажимам.
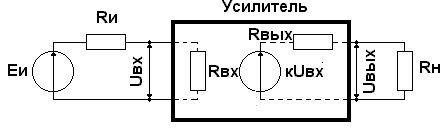
Усилитель содержит активные (полупроводниковые приборы) и пассивные (резисторы, конденсаторы, индуктивности) элементы, а также источники питания. Пассивные элементы предназначены для обеспечения заданного режима работы активных элементов.
Похожие работы
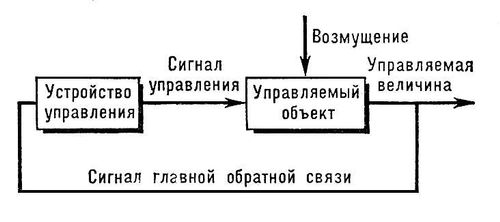
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... . Таким образом, необходимость автоматизации технологических процессов очевидна и есть необходимость научиться рассчитывать параметры систем автоматического управления (САУ), для последующего применения своих знаний на практике. В курсовой работе произведен анализ динамических свойств заданной структурной схемы САУ с составлением и анализом математических моделей объектов управления. 2. Анализ ...
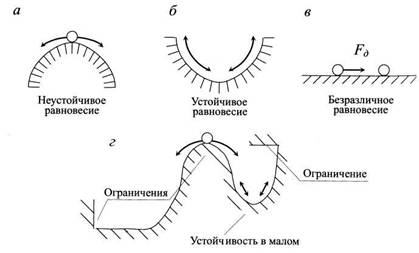
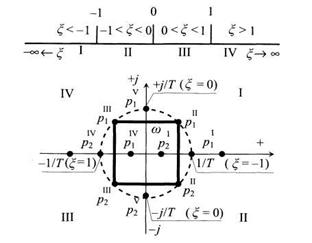
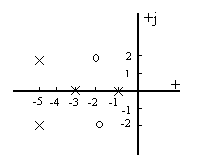
... можно судить, если в пространстве изменяемых параметров построить область устойчивости, т.е. выделить область значений параметров, при которых система сохраняет устойчивость. Область устойчивости в теории автоматического управления принято называть D – областью, а представление области параметров в виде областей устойчивости и неустойчивости называют D – разбиением. Построение области ...
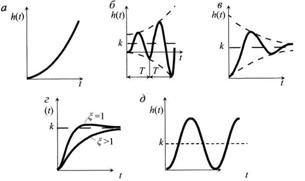
... для переходной функции (22) Подставив эти выражения в формулу для h(t) и выполнив преобразования, получим связь между переходной функцией и ВЧХ: (23) Логарифмические частотные характеристики САУ Исследование систем существенно упрощается при использовании не обычных, а логарифмических частотных характеристик. При этом натуральная логарифмическая амплитудная и фазовая частотные ...
0 комментариев