Навигация
1. Пространственный куб
2. Пространственный тор
 |
Цель: минимизировать число передач данных между узлами.
Обеспечивают большее количество подключенных устройств при меньшем количестве передач. Каждый узел – это ЦП, ОП, ВУ и т.д.
В SMP-системах синхронизация осуществляется с помощью семафоров.
Команда xchg AX,[BX] – обмен значений регистра AX и содержимого ячейки с адресом BX. Все происходит в цикле – чтение/модификация/запись.
При наличии кэша ситуация резко ухудшается, т.к. ЦП обращается к кэшу, а не к общей ОП. Нужен механизм управления кэшами.
Путь 1 – поместить общие данные в некэшируемые ячейки данных.
Путь 2 – Синхронизация кэшей.
Заводится бит Shared для данных в кэше. Если такие данные изменяются, то ЦП обмениваются данными.
У Интела добавляются четыре бита SMEH.
Принципы работы периферийных устройств- Внешние Запоминающие Устройства (ВЗУ)
- Устройства отображения
- Устройства связи
- Устройства сопряжения с объектами управления
- Специальные внешние устройства (таймеры и т.д.)
· Символьные (передают потоки данных в виде потока байтов)
· Блочные (всегда обмениваются блоками информации)
· Файловые (интерпретируют информацию в виде спецификаций ФС)
§ Синхронные (поставляют данные только по команде)
§ Асинхронные (сами в любой момент времени могут осуществить передачу данных)
Коммуникационные и устройства хранения:
- Произвольного доступа
- Последовательного доступа
По доступу:
- Коллективного доступа (запросы без ограничения из многих задач, не имеют истории запросов)
- Исключительного доступа (заранее задан порядок доступа, имеют историю запросов)
- Транзакционного доступа (исключительный доступ по очереди для разных задач)
Внешние Запоминающие Устройства (ВЗУ)Магнитные ВЗУ
 |
Ферромагнетики имеют кристаллическую структуру
 |
Непосредственно записывать и считывать данные с носителя невозможно, нужно использовать специальное кодирование.
Виды кодирования:
- Амплитудное – основано на абсолютном значении параметра;
- Частотное - основано не на значении параметра, а на факте его изменения.
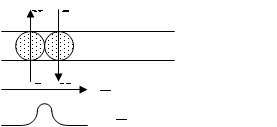
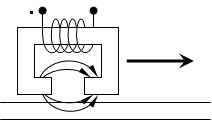
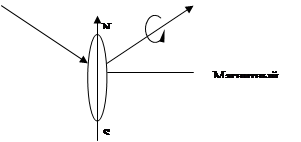
Запись и считывание
Чтение – анализ возникающего при движении головки тока.
Запись – подача тока в головку.
 |
Плотность записи (размер пятна) зависит от формы магнита и магнитных свойств материала.
Нечувствительный материал – жутко большое поле, значит, надо повышать площадь, чтобы не затереть соседние записи (пятна).
Чувствительный материал – больше плотность записи, но меньше уровень сигнала.
Оптические ВЗУ
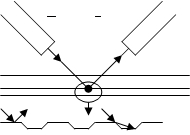 |
Кодирование тоже частотное: луч на какое-то время уходит с фотоприемника и возникает импульс.
А если надо писать?
Болванка – диск без канавок.
Запись производится тоже лазером, но при повышенной мощности луча – прожигание канавок. Это однократная запись.
Для многократной записи:
1. Фазовые диски (быстоостывающие сплавы, если остывают медленно – становятся аморфными и работаю как зеркало, если быстро – кристаллизуются и рассеивают свет)
2. Пленочные диски (полимерные пленки, которые под воздействием лазера изменяют свои спектральные свойства)
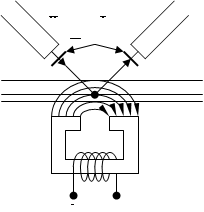
Магнитооптические ВЗУ
 |
 |
Разные излучения, имеющие высокие плотности, взаимодействуют между собой. Отражаясь от магнитного домена, луч получает спиновое
отклонение (поворачивается вектор поляризации). На обычном луче этого не видно, а только на поляризованном.
Луч, попадая на домен, изменяет свой вектор поляризации в зависимости от намагниченности материала (ориентации доменов). Таким образом, луч то проходит через поляризатор фотоприемника, то – нет.
Диаметр пятна в магнитооптических ВЗУ соизмерим с размером луча лазера, т.к. запись происходит в области, нагретой лазером. При нагревании, материал становится более магнитомягким. Магнитная головка может иметь большой размер пятна, но все равно область записи очень мала. Магнитная головка используется только при записи.
Способы кодирования информации
Как закодировать импульсами нули и единицы? Наличие импульса в определенном временном диапазоне означает единицу. Надо закодировать саму информацию и временное окно.
FM (Frequency Modulation) – ФК (Фазовое Кодирование) |
Каждое временное окно нужно закодировать. Временные окна делят пополам, следовательно, теряется ровно половина диска. Одно пятно уходит на синхроимпульсы, а второе на импульсы данных.
Плотность записи – 8ms. А исходно – 4ms.
Нужно использовать весь диск под данные и при этом не терять синхронизацию. Надо кодировать так, чтобы при длинных последовательностях нулей не терялась синхронизация.
MFM (МФК)Применяется на 5-ти и 3-ех дюймовых дисководах.
В нулях нет данных, поэтому будем их использовать для синхронизации. Бит данных располагается в середине временного окна, бит синхронизации – в начале.
В первом нуле синхроимпульс не пишется, чтобы не затереть окно предыдущей единицы.
Недостаток: аппаратура должна чувствовать импульсы с точностью 2ms.
RLL – ГК (Групповое Кодирование)Задача – преобразовать поток данных так, чтобы в нем отсутствовали длинные последовательности нулей (не более заданного количества).
Разобьем байт на две части по 4 бита.
| 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 1 |
| 0 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 1 |
| 0 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 0 |
| 0 | 0 | 1 | 1 | 1 | 0 | 0 | 1 | 1 |
| 0 | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 1 |
| . . . | . . . | |||||||
В новой последовательности не более двух нулей подряд – не успеем потерять синхронизацию (можно назвать RLL 0.2). Плотность информации на диске уменьшится на 1/5.
Надо, не теряя синхронизацию, более полно использовать возможности носителя, чем исходный поток данных.
Соответствующий метод – RLL. Исходные данные – просто поток битов, а выходные – такая последовательность битов, что между двумя единицами идет последовательность нулей, количество которых лежит в заданных пределах. Эти пределы прописаны в названии (например, RLL 2.7 – количество нулей от двух до семи включительно).
RLL 2.7
10 ® 1000
11 ® 0100
000 ® 100100
010 ® 001000
011 ® 000100
0010 ® 00001000
0011 ® 00100100
Реально нули на диск не пишутся, только единицы. Т.о. получается логическое сжатие информации. Реальный объем битов, который пишется на диск, уменьшается примерно на 40%.
Формат дискаВесь диск разбивается на одинаковые дорожки. Проблема – как найти начало дорожки?
Это делается чисто механически – на гибких дисках это дырочка, которая ловится оптопарой, а на жестких дисках делается вырез, при прохождении которого рядом с катушкой будет возникать импульс из-за изменения магнитного поля.
Формат дорожки.
 |
Зазор индекса содержит определенное количество синхроимпульсов, по которым определяется величина временного окна.
Сначала определяем величину временных окон, только потом читаем данные. Если не известен размер временных окон, то вообще ничего прочитать не получится.
Формат сектора

Идентификатор создается при форматировании и больше никогда не изменяется.
Последний байт маркера данных показывает тип сектора:
FB – сектор обычных данных
F8 – сектор стертых данных (не видны команде стандартного чтения)
Перед записью данных всегда производится запись межзонных промежутков.
 |
Малые интерфейсы
Контроллеры Внешних Устройств разные для разных Системных Шин. Нужно, чтобы можно было подключать большое количество устройств к одному контроллеру.
Малые интерфейсы – интерфейсы между контроллером и внешним устройством.
ST412 (Seagate Technology)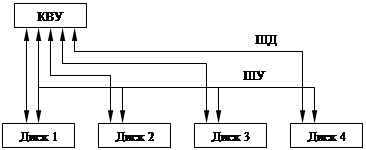 |
Контроллер позволяет подключать до четырех дисков. Есть две шины – шина
управления (одна на всех) и шина данных (по одной на устройство).
Шины данных – аналоговые!
Недостаток – контроллер должен знать характеристики всех дисков, чтобы ими управлять.
Должна быть некая информация, устанавливаемая извне. Для этого использовался CMOS.
 |
IDE
 |
Производитель выполняет диск вместе с контроллером к нему. Контроллер IDE просто коммутирует на шину нужный диск. Одновременная работа с двумя дисками невозможна.
Не нужно знать о характеристиках диска.
Можно ввести понятие физического и логического адресов. Сейчас диску передается уже номер логического сектора (LBN), а контроллер сам знает, где этот сектор физически находится. Еще и можно применять переменное количество секторов на дорожке.
Эта схема хороша для подключения большого числа дисков, но не позволяет работать со всеми дисками одновременно.
Интерфейсы, решающие эту проблему:
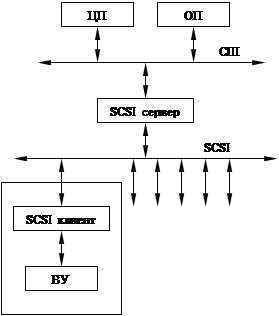
SCSI (Small Computer System Interface)Был разработан как системный интерфейс, но потом стал использоваться как малый.
Внешнее устройство имеет на выходе SCSI-клиент интерфейс.
Каждое ВУ имеет свой собственный адрес (1, 2, 3, 4, 5, 6, 7).
SCSI-сервер имеет адрес 0.
В принципе, SCSI – полноценная шина. Она имеет циклы шина, адреса, набор управляющих команд.
Команды делятся на группы:
1. Обязательные (не зависят от типа устройства)
2. Рекомендуемые (для выполнения операций обмена, зависят от типа устройства)
3. User-defined
Ограничен не сам ресурс, а скорость шины (канала доступа к этим ресурсам). Управление ВУ осуществляется с помощью подачи последовательностей команд по SCSI шине (логическое управление).
Недостаток – высокая стоимость.
Применяется там, где без него вообще нельзя.
RAID (организация дисковых массивов)RAID0 – ничего, обычный диск.
RAID1 – оптимизация доступа.
RAID2 – резервирование (зеркало), один сектор пишется сразу на два диска, но зато чтение происходит с обоих сразу – при чтении удваивается скорость.
RAID5 – резервирование и “склеивание” дисков, нужно не менее трех. В одном из них хранится XOR всех секторов с таким же номером с других дисков. Повышается скорость из-за “склеивания” и возможность восстановить информацию, если любой из дисков (но только один) грохнется.
Hot Plug интерфейсы – PCMCIA и USB
Основная идея – обеспечить на носимых мобильных компьютерах, где мало слотов для ВУ, возможность динамически (без выключения компьютера) подключать и отключать устройства.
У них специальные физический и электрический интерфейсы.
PCMCIA Box – контроллер, управляющий слотами, в которые вставляются ВУ. Он работает совместно с сервисами типа Plug’n’Play.
 |
Особенности конструкций ВЗУ
 |
Ключевая проблема – надо довести магнитное поле до магнитного покрытия.
Чем дальше головка от носителя, тем больше пятно. Чтобы более полно использовать носитель, надо уменьшить магнитное пятно. Лучше всего, когда расстояние до покрытия – нулевое. Но тогда возникает контакт (так называемые контактные магнитные носители).
Носителю не нужна вертикальная жесткость – ленту можно прижать к головке. По этой технологии разработаны магнитные ленты и гибкие диски.
Недостаток – стирается магнитное покрытие при увеличении скорости и в результате разогрева.
Надо отодвинуть головку от носителя, для увеличения скорости, но не сильно (на микроны).
Пример – магнитный цилиндр.
Из-за тепловой деформации и при резком торможении нельзя сделать достаточно малый зазор.
Еще путь: динамически заставлять головку адаптироваться под изменение формы носителя.
 |
Тут нужен диск.
Скорость воздуха вблизи диска выше из-за вязкости и трения воздуха о диск.
Головка из-за своей формы приобретает некоторые аэродинамические

свойства: при вращении диска на головку действует подъемная сила, и она отрывается от диска.
С другой стороны пружина прижимает головку к диску.
 |
Итак, головка находится в устойчивом равновесии. Она будет поддерживать некоторый зазор. Технически можно обеспечить зазор в несколько микрон.
Проблема: когда зазор станет соизмерим с размером пылинок, пыль, которая засасывается под головку, приводит к разогреву и износу.
Выход: технология “винчестера” – диск помещается в герметичный корпус (герметичный от пыли, но пропускающий воздух с помощью мембран, чтобы выравнивать давление).
Привод головок
Подошли к пределу плотности записи для материала. Как еще повысить плотность?
Надо позиционировать головку как можно точнее, чтобы приблизиться к пределу продольной плотности записи.
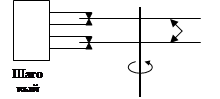
Сначала для привода головок использовался шаговый двигатель.
Подается ток противоположной направленности – система в равновесии. Если поменять направление тока – планка сдвинется ровно на один зуб. Еще переключим – еще
на зуб. Поэтому этот шаговый двигатель – линейный.
Есть еще круговой.
 |
Применяется для гибких дисков. Зуб нельзя сделать меньше определенного размера.
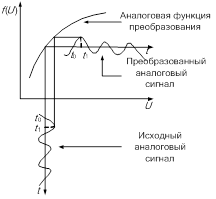
Тогда: асинхронный двигатель с обратной связью.
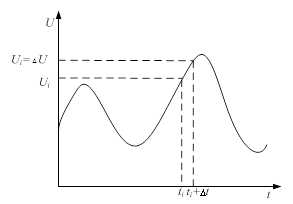
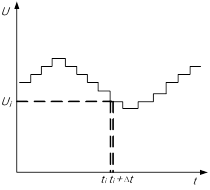
Несколько дисков, последний слой покрытия называется “серво”. На эту серво-поверхность записывается аналоговый сигнал. Серво-головка только читает.
Головке дают сигнал “вперед” на время, равное времени, чтобы пройти половину периода (см. серво-поверхность).
Серво-головка служит обратной связью: ловит минимум на серво-поверхности, и останавливает головки. Головки все время подрагивают, т.к. двигатель постоянно работает.
Связные ПУ (Устройства связи)Служат для передачи информации между компьютерами.
ВЗУ – аналоговые.
В случае Связных ПУ можно передавать прямо цифровую информацию, т.к. и источник и приемник – компьютеры.
Классификация связных ПУ.
По способу кодирования:
- Амплитудные
- Частотные
По способу формирования сигнала:
- Модулированные
- Немодулированные
По механизму синхронизации:
- Синхронные
- Асинхронные
По средам передачи информации (все носят электромагнитную природу):
- Проводные линии связи
- Оптические
- Радио
Проводные – передача по металлическому проводу |

Но не все так просто – окружающая среда воздействует на передаваемый сигнал.
Медный провод – наименьшее удельное сопротивление.
При увеличении длины растет сопротивление провода и, следовательно, падает уровень сигнала. Как сделать, чтобы не было зависимости от длины?
Надо использовать “Токовую Петлю”.
При работе на больших расстояниях надо использовать источники тока – блок питания, который поддерживает в цепи одинаковую силу тока, меняя свое напряжение.
Передача информации напряжением – механизм, использующий напряжение.
Передача информации током – механизм, использующий ток.
Активное сопротивление влияет на амплитуду сигнала. А индуктивность и паразитная емкость проводов влияют на фазу сигнала – намного хуже.
Чем выше частота сигнала, тем больше его искажают по фазе индуктивность и емкость – будут завалены фронты у меандра.
По Фурье: можно разложить любой периодический сигнал на сумму синусоид, а затем собрать обратно.
ОптоволокноЕще луч имеет толщину, и даже у лазера луч немного конический.
Происходит искажение длин – вот и сдвиг по фазе. Еще и вибрация вызывает жуткие помехи. Так что проблем не меньше, чем при передаче по проводу, только природа другая.
Радио
У радиосигнала поглощение пропорционально квадрату расстояния, а не линейно, как у провода.
Невозможно реализовать дуплексные соединения.
Мертвая зона: при мощности, свыше определенной, приемник “слепнет”. Если мы излучаем 10 Вт, а придет сигнал 0.2 Вт, мы его не поймем.
Выход – разделение частотных диапазонов. Еще – применение направленных
 |
антенн (излучают не по сфере, а пучком). Тогда возможно координатное разделение. Если этого нет – остается только временное разделение.
Спутниковая связь

Тут два варианта – спутники с высокой орбитой и спутники с низкой орбитой.
 |
Наши используют спутники с высокой орбитой. Общение только через спутник-посредник.
 |
А американцы используют низкие орбиты
Недостатки:
Похожие работы
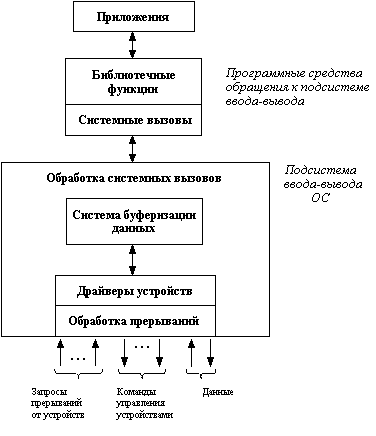
... различными пользователями. Наличие выделенных устройств создает для операционной системы некоторые проблемы. Для решения поставленных проблем целесообразно разделить программное обеспечение ввода-вывода на четыре слоя (рисунок 2.30): Обработка прерываний, Драйверы устройств, Независимый от устройств слой операционной системы, Пользовательский слой программного обеспечения. Рис ...




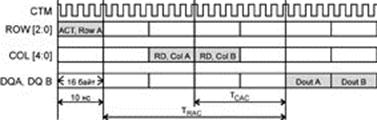
... производительность 1600 Мбайт/с на двухбайтной шине данных при частоте 400 МГц. Стандарт DRDRAM поддержан множеством производителей микросхем и модулей памяти, он претендует на роль основного высокопроизводительного стандарта для памяти компьютеров любого размера. Подсистема памяти (ОЗУ) DRDRAM состоит из контроллера памяти, канала и собственно микросхем памяти. По сравнению с DDR SDRAM при той ...
... времени суток и дням недели для различных пользователей; блокировка ПЭВМ на время отсутствия пользователя на рабочем месте; контроль и тестирование средств защиты; По требованию Заказчика БАЗОВАЯ СИСТЕМА ВВОДА-ВЫВОДА может быть дополнена программами обслуживания специальных устройств, а также введена поддержка национальных таблиц маркировки клавиатур и кодовых таблиц знакогенератора адаптера ...

... также невысока и обычно составляет около 100 кбайт/с. НКМЛ могут использовать локальные интерфейсы SCSI. Лекция 3. Программное обеспечение ПЭВМ 3.1 Общая характеристика и состав программного обеспечения 3.1.1 Состав и назначение программного обеспечения Процесс взаимодействия человека с компьютером организуется устройством управления в соответствии с той программой, которую пользователь ...
0 комментариев