Навигация
Основные понятия аналитической геометрии
41874
знака
0
таблиц
11
изображений
1.2. Основные понятия аналитической геометрии.
Аналитическая геометрия не имеет строго определенного содержания и определяющим для нее является не предмет исследования, а метод. То есть аналитическая геометрия имеет своей задачей изучение свойств геометрических объектов при помощи аналитического метода.
В основе этого метода лежит так называемый метод координат, впервые систематически примененный Декартом.
Основные понятия геометрии (точки, прямые линии и плоскости) относятся к числу так называемых начальных понятий. Эти понятия можно описать, но всякая попытка дать определение каждого из этих понятий неизбежно сведется к замене определяемого понятия ему эквивалентным. С научной точки зрения логически безупречным методом введения указанных понятий является аксиоматический метод, в развитии и завершении которого величайшая заслуга принадлежит Гильберту.
Аксиоматический метод закладывает фундамент и для лежащего в основе аналитической геометрии метода координат. Ради простоты рассмотрим вопрос о введении координат на прямой. Возможность введения координат на прямой основывается на возможности установления взаимно однозначного соответствия между множеством всех точек прямой и множеством всех вещественных чисел.
Доказательство возможности установления такого соответствия базируется на аксиомах геометрии и на аксиомах (свойствах) множества вещественных чисел.
Метод координат представляет собой глубокий и мощный аппарат, позволяющий привлекать для исследования геометрических объектов. Благодаря универсальности подхода к решению различных задач, метод аналитической геометрии стал основным методом геометрических исследований и широко применяется в других областях точного естествознания – механике, физике.
Аналитическая геометрия объединила геометрию с алгеброй и анализом, что плодотворно сказалось на развитии этих трех разделов математики.
1.3.Метод координат на плоскости
Метод координат лежит в основе аналитической геометрии. Суть системы координат состоит в том, что тем или иным способом устанавливается соответствие между точками плоскости (геометрическими объектами) и упорядоченными парами вещественных чисел (алгебраическими объектами). Вследствие этого геометрические фигуры, представляющие собой множества точек плоскости, оказываются состоящими из таких точек, координаты которых удовлетворяют некоторым алгебраическим соотношениям (уравнениям, неравенствам или их системам). В результате изучение свойств геометрических фигур заменяется изучением свойств алгебраических соотношений, описывающих эти фигуры. Для их изучения, в свою очередь, применяются методы алгебры и математического анализа.
Способов введения на плоскости систем координат существует великое множество. В своей курсовой работе я рассмотрю аффинную (и её частный случай – декартову) систему координат на плоскости.
1.4. Аффинная система координат на плоскости.
Определение. Аффинная система координат (или аффинным репером) на плоскости называется упорядоченная тройка точек этой плоскости не лежащих на одной прямой: R={О, Е1, Е2}.
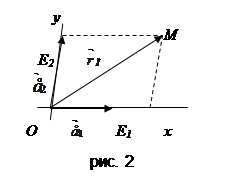
Рассмотрим тогда векторы: е(а)1= ОЕ(а)1 и е(а)2 = ОЕ(а)2 (рис. 2). Поскольку точки О, Е1, Е2, не лежат на одной прямой, поэтому векторы е(а)1и е(а)2 не коллинеарны, следовательно, они образуют базис совокупности V2 всех векторов плоскости. Таким образом, мы приходим к упорядоченной тройке R={О, е(а)1, е(а)2}, состоящей из точки О и двух неколлинеарных векторов е(а)1и е(а)2.
 Обратно если дана упорядоченная тройка R={О, е(а)1, е(а)2}, состоящая из точки О и двух неколлинеарных векторов е(а)1и е(а)2, то от неё легко перейти к тройке R={О, Е1, Е2}, отложив векторы е(а)1и е(а)2 от точки О и взяв соответственно концы этих векторов Е1 и Е2: е(а)1= ОЕ(а)1 и е(а)2 = ОЕ(а)2. Ясно, что точки О, Е1, Е2, не будут лежать на одной прямой, так как векторы е(а)1и е(а)2 не коллинеарны.
Обратно если дана упорядоченная тройка R={О, е(а)1, е(а)2}, состоящая из точки О и двух неколлинеарных векторов е(а)1и е(а)2, то от неё легко перейти к тройке R={О, Е1, Е2}, отложив векторы е(а)1и е(а)2 от точки О и взяв соответственно концы этих векторов Е1 и Е2: е(а)1= ОЕ(а)1 и е(а)2 = ОЕ(а)2. Ясно, что точки О, Е1, Е2, не будут лежать на одной прямой, так как векторы е(а)1и е(а)2 не коллинеарны.
Таким образом, мы приходим к выводу, что задание на плоскости системы координат как упорядоченной тройки точек R={О, Е1, Е2}, не лежащих на одной прямой, равносильно заданию её как упорядоченной тройки R={О, е(а)1, е(а)2}, состоящей из точки О и двух неколлинеарных векторов е(а)1и е(а)2. В результате в геометрическую картину, составленную из точек, вводятся векторы.
Первая точка О в системе координат R называется началом системы координат, а векторы е(а)1 и е(а)2 – её базисными или координатными векторами. Прямая ОЕ1 с направляющим вектором е(а)1 называется координатной осью Ох, или осью абсцисс, а прямая ОЕ2 с направляющим вектором е(а)2 называется координатной осью Оу, или осью ординат.
Пусть на плоскости задана система координат R={О, е(а)1, е(а)2} и произвольная точка М. Вектор ОМ(а) = r(а)м называется радиус-вектором точки М относительно точки О (или системы координат R).
Определение. Координатами точки М в системе координат R={О, е(а)1, е(а)2} называются координаты её радиус-вектора ОМ(а) в базисе е(а)1, е(а)2, то есть коэффициенты х, у в его разложении в линейную комбинацию векторов базиса: М(х, у)Ró ОМ(а) = хе(а)1+ уе(а)2.
Итак, понятие координат точки тесно связывается с понятием координат вектора, а понятие системы координат для точек – с понятием базиса векторов. «Привязывая» векторный базис к фиксированной точке плоскости (началу координат), мы приходим к системе координат для точек. Если тот же векторный базис «привязать» к другому началу, мы получим другую систему координат для точек.
Векторы а(а) и в(а) коллинеарны тогда и только тогда, когда их координаты пропорциональны.
Каждой точке М плоскости поставим в соответствие вектор ОМ(а). Координаты вектора ОМ(а) называются координатами точки М в данной аффинной системе координат. При этом если ОМ(а) = (х, у), то пишут: М (х, у).
Пусть прямые, проведенные через точку М параллельно осям координат, пересекают оси координат соответственно в точках М1 и М2 (рис. 2). Тогда имеем
ОМ(а) = ОМ(а)1 + ОМ(а)2.
С другой стороны,
ОМ(а) = хе(а)1+ уе(а)2.
Следовательно,
х =ОМ(а)1 / е(а), у = ОМ(а)2 / е(а)2.
Точки Е1 и Е2имеют координаты: Е1 (1; 0), Е2 (0;1).
Если на плоскости даны две точки А (х1, у1) и В (х2, у2), то координаты вектора АВ(а) вычисляются так:
АВ(а) = ОВ(а) - ОА(а) = (х2 - х1, у2 - у1).
Пусть точка С делит отрезок АВ в данном отношении: 
 Тогда
Тогда ![]() . Из правил действии над векторами в координатах следует, что координаты точки С определяются формулами:
. Из правил действии над векторами в координатах следует, что координаты точки С определяются формулами:
![]() ,
, ![]()
В частности, если С – середина отрезка АВ, то
![]() ,
, ![]()
Рассмотрим различные способы задания прямой на плоскости.
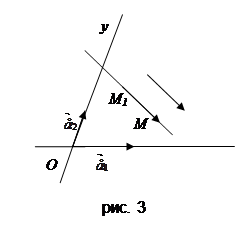
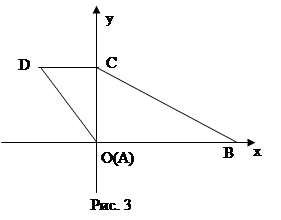
Пусть требуется написать уравнение прямой l, заданной в некоторой аффинной системе координат точкой М1 (х1, у1) и ненулевым вектором ![]() , параллельным прямой l (рис. 3).
, параллельным прямой l (рис. 3).
Вектор а(а) будет называться направляющим вектором прямой l .
Пусть М (х, у) – произвольная точка прямой l . Тогда, согласно условию, векторы ![]() и а(а) коллинеарны тогда и только тогда, когда выполняется равенство
и а(а) коллинеарны тогда и только тогда, когда выполняется равенство ![]() , или
, или
ОМ(а) = ОМ(а)1 + tа(а),
где t – некоторое число (параметр). Это соотношение в координатах запишется так:

Полученные уравнения называют параметрическими уравнениями прямой.
При ![]() и
и ![]() эти уравнения равносильны следующему уравнению первой степени:
эти уравнения равносильны следующему уравнению первой степени:

Если прямая задана двумя различными точками: А(х1, у1) и В (х2, у2), то вектор АВ(а) = (х2 - х1, у2 - у1) является направляющим вектором прямой l. Следовательно, при х1![]() х2 и у1
х2 и у1![]() у2 получаем уравнение
у2 получаем уравнение
![]() ,
,
которое называется уравнением прямой, проходящей через две точки.
 В частности, если прямая l проходит через точки А (а, 0) и В (0, b), отличные от начала координат, то уравнение прямой принимает вид
В частности, если прямая l проходит через точки А (а, 0) и В (0, b), отличные от начала координат, то уравнение прямой принимает вид
Это уравнение называется уравнением прямой в отрезках.
Исключая из параметрических уравнений прямой параметр t. При ![]() получим уравнение:
получим уравнение:
у- у1 = k (х- х1),
где ![]() . Число k называют угловым коэффициентом прямой. В частном случае, при х1 = 0 и у1 = b, уравнение принимает вид
. Число k называют угловым коэффициентом прямой. В частном случае, при х1 = 0 и у1 = b, уравнение принимает вид
![]()
Если же ![]() , то прямая l параллельна оси Оy, а её уравнение запишется так:
, то прямая l параллельна оси Оy, а её уравнение запишется так:
х = х1.
Таким образом, всякую прямую на плоскости можно задать уравнение первой степени Ах + Ву + С = 0, где хотя бы одно из чисел А и В отлично от нуля. Верно и обратное предложение: всякое уравнение первой степени Ах + Ву + С = 0 есть уравнение некоторой прямой в аффинной системе координат на плоскости.
При ![]() уравнение Ах + Ву + С = 0 приводится к виду у = kх + b, где
уравнение Ах + Ву + С = 0 приводится к виду у = kх + b, где
![]() ,
, ![]()
Если же В = 0 и ![]() , то оно принимает вид х = а, где
, то оно принимает вид х = а, где ![]() .
.
Похожие работы

... учебник и задачник / А. П. Кисилев, Н.А. Рыбкин. – М.: Дрофа, 1995. 9. Изучение личности школьника / под. ред. Л.И. Белозеровой. – Киров, Информационный центр, 1991. 10. Коновалова, В.С. Решение задач на построение в курсе геометрии как средство развития логического мышления / В.С. Коновалова, З.В. Шилова // Познание процессов обучения физике: сборник статей. Вып.9. – Киров: Изд-во ...
... 1. Точки М и N — середины диагоналей АС и BD четырехугольника ABCD. (Рис.1)Доказать, что |AB|2+|BC|2+|CD|2+|DA|2 = |AC|2+|BD|2+4|MN|2.Решение. Пусть точкам A, В, С, D, М, N соответствуют комплексные числа а, b, с, d, т, п.Так как m = и n = , то |AB|2+|BC|2+|CD|2+|DA|2 |AC|2+|BD|2+4|MN|2 .Равенство доказано.Задача 2. Доказать, что если в плоскости параллелограмма ABCD существует такая точка М, ...
... , основанной на поглощении атомами рентгеновского излучения. Ультрафиолетовая спектрофотометрия — наиболее простой и широко применяемый в фармации абсорбционный метод анализа. Его используют на всех этапах фармацевтического анализа лекарственных препаратов (испытания подлинности, чистоты, количественное определение). Разработано большое число способов качественного и количественного анализа ...

... координат состоит в том, что его применение избавляет от необходимости прибегать к наглядному представлению сложных пространственных изображений. Можно выделить следующие цели изучения метода координат в школьном курсе геометрии: - дать учащимся эффективный метод решения задач и доказательства ряда теорем; - показать на основе этого метода тесную связь алгебры и геометрии; - способствовать ...
0 комментариев