Навигация
Розробка алгоритмічної частини розпізнавання зображення
21913
знаков
3
таблицы
4
изображения
3. Розробка алгоритмічної частини розпізнавання зображення
3.1 Розробка загального алгоритму розпізнавання
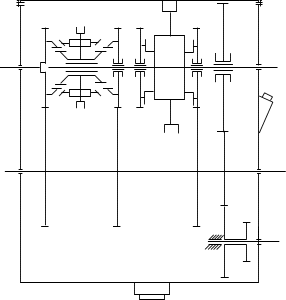
Для обробки вхідного відеосигналу з подальшим формуванням еталонів попередньо здійснюють первинне та повторні центрування за моментними ознаками, які реалізовані за допомогою способу розпізнавання симетричних зображень об'єктів, блок-схема алгоритму якого показана на додатку Д. Процедура, що подається в кожній операторній вершині даної блок-схеми, відповідає макрооперації, реалізованій у системі розпізнавання [14,15].
У даному курсовому проекті буде розроблятись блок первинного центрування зображення.
Первинне центрування дозволяє визначити центр тяжіння об’єкта.
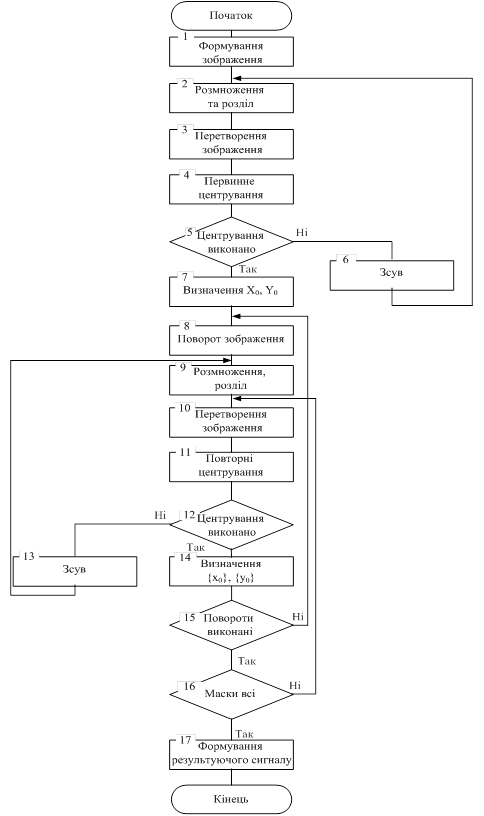
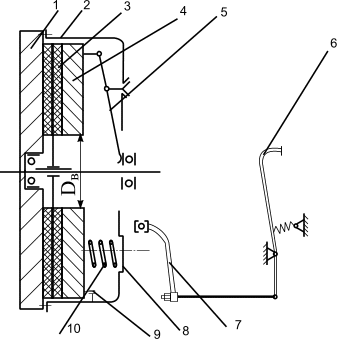
Введене зображення об'єкта з вхідною орієнтацією (оператор 1) формується у вигляді світлового потоку. Світловий потік розмножується й розділяється на два рівних потоки (оператор 2) та обробляється у двох каналах. Для цього кожен з мультиплікованих світлових потоків пропускають через тіньові бінарні маски, що дозволяє здійснити просторову модуляцію зображення (оператор 3). Модуляція здійснюється за допомогою комплекту тіньових масок, що сприяють виконанню первинного центрування (оператор 4), тобто визначенню зважених сум інтенсивностей зображення і їхньому порівнянню (оператор 5). При рівності зважених сум інтенсивностей зображення (оператор 7), фіксується певна інформація, що відповідає тому чи іншому еталону класу симетрії. В протилежному випадку здійснюється зсув зображення (оператор 6) з виявленням додаткових ознак для формування певного еталону симетричного зображення.
3.2 Розробка прошивки ПЗП
Закодуємо умовні вершини блок – схеми алгоритму блока первинного центрування зображення (Додаток Б).
У додатку В представлено закодовану блок – схему алгоритму блока первинного центрування зображення, де Y- мікрооперації керуючих сигналів, Х- умовні вершини. Робимо таблиці кодувальних мікрооперацій в залежності від їх розташування в під полях.
Таблиця 4.1
| Двійковий код | Y1 | Y2 | Y 3 |
| 0001 | y0 | y1 | y2 |
| 0010 | y3 | y6 | y7 |
| 0011 | y4 | y5 | y8 |
| 0100 | y9 | y17 | y15 |
| 0101 | F |
Складемо прошивку ПЗП. Прошивка ПЗП – це послідовність мікрокоманд, яка має виконуватись починаючи від початку до кінця роботи алгоритму.
Таблиця 4.2
| немає Х | 0000 |
| X1 | 0001 |
| Х2 | 0010 |
| Х3 | 0011 |
| Х4 | 0100 |
| Х5 | 0101 |
| Х6 | 0110 |
| Х7 | 0111 |
| Х8 | 1000 |
Таблиця 4.3
| Адреса | Y1 | Y2 | Y3 | Х | А0 | А1 |
| 00000 | 0001 | 0000 | 0000 | 0000 | 0001 | 0001 |
| 00001 | 0010 | 0001 | 0001 | 0000 | 0010 | 0010 |
| 00010 | 0000 | 0000 | 0000 | 0001 | 0010 | 0011 |
| 00011 | 0000 | 0000 | 0000 | 0010 | 0011 | 0100 |
| 00100 | 0000 | 0000 | 0000 | 0011 | 1001 | 0101 |
| 00101 | 0000 | 0000 | 0000 | 0100 | 0110 | 1100 |
| 00110 | 0000 | 0000 | 0000 | 0110 | 1000 | 0111 |
| 00111 | 0000 | 0000 | 0010 | 0000 | 0101 | 0101 |
| 01000 | 0000 | 0010 | 0000 | 0000 | 01010 | 0101 |
| 01001 | 0000 | 0000 | 0000 | 0101 | 1011 | 1010 |
| 01010 | 0011 | 0000 | 0000 | 0000 | 0100 | 0100 |
| 01011 | 0000 | 0011 | 0000 | 0000 | 0100 | 0100 |
| 01100 | 0100 | 0000 | 0011 | 0000 | 1101 | 1101 |
| 01101 | 0000 | 0000 | 0000 | 0111 | 10001 | 1110 |
| 01110 | 0000 | 0100 | 0000 | 0000 | 1111 | 1111 |
| 01111 | 0000 | 0000 | 1000 | 0000 | 10000 | 10000 |
| 10000 | 0000 | 0000 | 0000 | 1000 | 1110 | 10001 |
| 10001 | 0101 | 0000 | 0000 | 0000 | 0000 | 0000 |
Висновки
В даному курсовому проекті було розроблено блок керування для блока первинного центрування зображення. Було докладно розглянуто сучасний стан питання у даній області техніки, принцип дії як всього пристрою, так і його окремих структурних блоків. Розглянуто структурну організацію пристрою, проаналізовано можливу реалізацію структурних блоків.
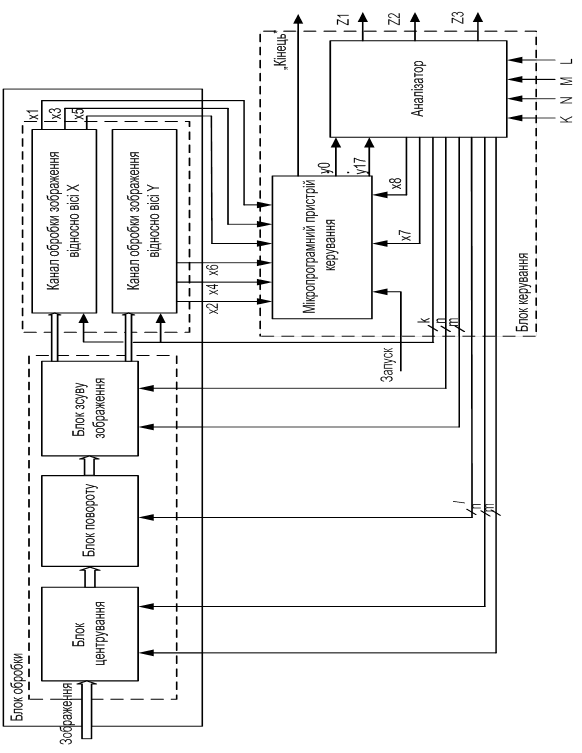
Особливістю структурної організації блока керування для запропонованої системи розпізнавання зображень, який виконує не лише функцію керування, а також попередню обробку зображень, зумовлює розділення його на два функціонально-самостійні пристрої: мікропрограм ний пристрій керування та аналізатор, які, в свою чергу, достатньо вдало можна реалізувати на перспективний елементній базі - програмованих логічних IС (ГОПС).
Також було подано докладний алгоритм роботи розпізнавання зображення.
Література
1. Анисимов Б.В., Курганов В.Д., Злобин В.К. Распознавание и цифровая обработка изображений. – М.: Высшая школа, 1983. – 295 с.
2. Куафе Ф. Взаимодействие робота с внешней средой: Пер. с франц. - М.: Мир, 1985. – 285 с.
3. Путятин Е.П., Аверин С.И. Обработка изображений в робототехнике. – М.: Машиностроение, 1990. – 318 с.
4. Генкин В.Л., Ерош И.Л., Москалев Э.С. Системы распознавания автоматизированных производств. – Л.: Машиностроение. Ленинградское отделение, 1988. – 246 с.
5. Системы очувствления и адаптивные промышленные роботы / Под общей ред. Е.П. Попова и В.В. Клюева. – М.: Машиностроение, 1985. – 256 с.
6. Буда А.Г.. Мартынюк Т.Б., Лищинская Л.Б. Структурный переход от исходных признаков к результативным на этапах предварительной обработки изображений // Науково-технічна конференція "Приладобудування-96". Ч.1. – Винница-Судак, 1996. – С. 127.
7. Буда А.Г., Мартынюк Т. Б. Конструирование моментных признаков на этапах распознавания классов и подклассов изображений // 3-я Українська конф. з автоматичного керування "Автоматика-96". – Севастополь: СевГТУ, 1996. – С. 156-157.
8. Буда А.Г. Розробка моделей та дослідження прикладних методів обробки геометричних зображень на підставі моментних характеристик: Автореферат дис... канд. тех. наук: 05.13.16 / Вінниц. політехн. ін-т. – Вінниця, 1993. – 23 с.
9. Буда А.Г., Мартинюк Т.Б., Кожем’яко А.В. Створення еталонів класів та підкласів зображень на підставі моментних ознак // Праці Третьої Всеукраїнської міжнародної конференції "УкрОБРАЗ-96". – Київ, 1996. – С. 79-81.
10. Buda A., Martyniuk T., Buda S. Methods of representation of the symmetric images in devices of recognition, in Selected Paper from the International Conference on Optoelectronic Information Technologies, Proceeding of SPIE/ Vol. 4425 (2001), pp. 70-75.
11. Буда А.Г., Мартинюк Т.Б., Кормановський С.І., Король О.В. Базис геометричних ознак зображень та особливості їх застосування // Матеріали МНПК "Сучасні проблеми геометричного моделювання". – Львів, 2003. – С. 162-166.
12. Буда А.Г., Мартинюк Т.Б. Ознаковий простір моментних характеристик при розпізнаванні класів і підкласів симетричних зображень//Вісник ВПІ – 2007. – №1 – С. 61-66.
13. Буда А.Г., Мартинюк Т.Б., Король О.В. Створення множини ознак при аналізі правильних зображень // Праці Восьмої Всеукраїнської міжнародної конференції "УкрОБРАЗ-2006". – Київ, 2006. – С.111-113.
14. Патент України №3741, кл. G06К9/58, G06К9/52 Спосіб розпізнавання симетричності зображень об’єктів і пристрій для його реалізації/ В. П. Кожем’яко, В.Г. Красиленко, Т.Б. Мартинюк, А.Г. Буда. – №93321261; Заявлено 16.03.93; Опубл. 27.12.94, Бюл. № 6-1. – 35 с.
15. Патент України 52678, кл. G06К9/00, G06К9/58, G06К9/52. Пристрій для розпізнавання симетричності зображень об’єктів/А.Г. Буда, Т.Б. Мартинюк, А.В. Кожем’яко, В.І. Андрущенко. – № 99021033; Заявлено 23.02.99; Опубл. 15.01.2003, Бюл. № 1.–32с.
16. Семенов А.С., Смирнов В.Л., Шмалько А.В. Интегральная оптика для систем передачи и обработки информации. – М.: Радио и связь, 1990. – 224 с.
17. Волоконно-оптические системы передачи информации и кабели : Справочник / И.И. Гроднев и др. – М.: Радио и связь, 1993. – 246 с.
18. Кожем’яко В.П., Павлов С.В., Мартинюк Т.Б., Лисенко Г.Л. Волоконно-оптичні структури комутації та передачі інформації. Навч. посібник. – Вінниця: ВДТУ, 2002. – 106 с.
19. Каган В.М. Электронные вычислительные машины и системы: Учеб. пособие для вузов. – М.: Энергоатомиздат, 1991. – 592 с.
20. Апраксин Ю.К. Теория и проектирование ЭВМ. Синтез управляющих автоматов: Учебное пособие. – К.: ІСДО, 1993. – 80 с.
21. Баранов С.И. Синтез микропрограммных автоматов – Л.: Энергия, 1979.
22. Арсеньев Ю.Н., Журавлев В.М. Проектирование систем логического управления на микропроцессорных средствах: Учебное пособие. – М. : Высшая школа, 1991. - 319 с.
23. Мартынюк Т.Б., Кожемяко А.В., Вербицкий И.А, Фофанова Н.В. Реализация анализатора симметричности зображений в элементном базисе ПЛИС FLEX 10K // Вимірювальна та обчислювальна техніка в технологічних процесах: Збірник наукових праць. – Хмельницький:ТУП, 2001. – Вип. №8 (2001) –С.55-58.
24. Буда А.Г., Мартынюк Т.Б., Лысенко Г.Л. Техническая реализация признаков, полученных на основе исследования функциональных характеристик // Оптико-електронні інформаційно-енергетичні технології. – 2002. – № 2(4).– С. 71-77.
25. Мартинюк Т.Б., Фофанова Н.В., Шеляков О.Л. Реалізація блока керування на R-автоматі в елементному базисі ПЛІС//Вісник ВПІ. – 2002.- №2. – С.51-55.
26. Лисенко Г.Л., Мартинюк Т.Б., Фофанова Н.В. Особливості реалізації в елементному базисі ПЛІС мікропрограмних R- автоматів // Вісник ЖІТІ. Спецвипуск. – 2002. – С. 203-206.
27. Буда А.Г., Мартынюк Т.Б., Буда С.А. Методы представления симметричных изображений в устройстве распознавания // Збірник тез доповідей МНТК "Оптоелектронні інформаційні технології. Photonics – ODS2000". – Вінниця: "Універсум-Вінниця", 2000. – С. 37-39.
28. Буда А.Г., Мартынюк Т.Б., Король О.В. Алгоритм сжатия изображения и его классификационные признаки // Збірник наукових праць "Геометричне та комп’ютерне моделювання". Вип. 8. Харківський державний универсистет харчування та торгівлі. – Харків, 2005. – С. 205-210.
29. Буда А.Г., Мартинюк Т.Б., Лисенко Г.Л., Король О.В., Буда С.А. Математичні моделі аналізу контурів плоских симетричних зображень // Праці П’ятої Всеукраїнської міжнародної конференції "УкрОБРАЗ-2000". – Київ, 2000. – С.221-222.
30. Буда А.Г., Мартинюк Т.Б. Король О.В. Створення модифікації математичної моделі на підставі геометричних моментів // Материалы Второй украинско-российской научно-практической конференции "Современные проблемы геометрического моделирования". – Харьков, 2007. – С. 205-210.
ДОДАТКИ
Додаток А
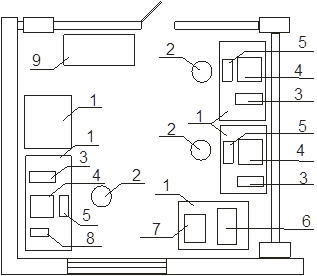
Структурна схема системи розпізнавання
Додаток Б
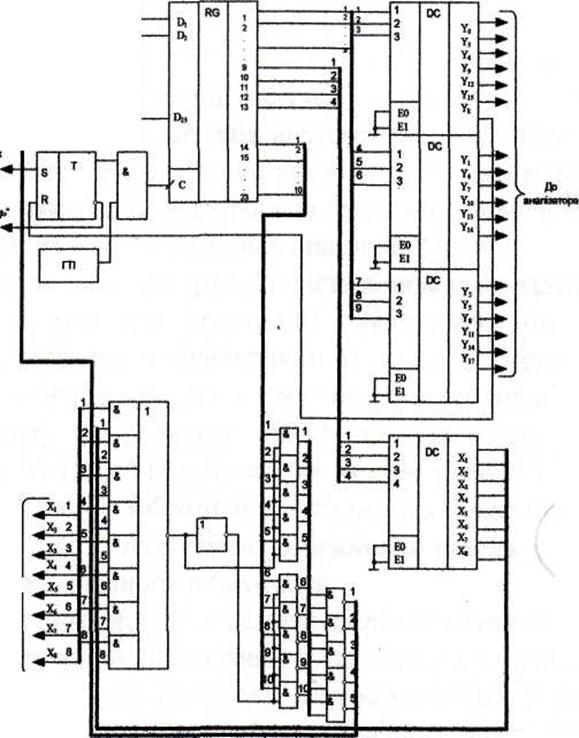
Мікропрограмний пристрій керування
Додаток В
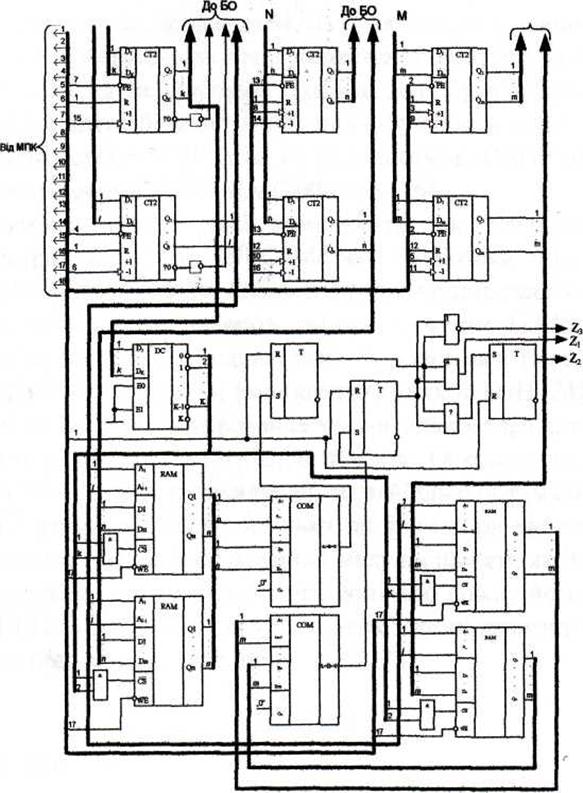
Аналізатор симетричності об'єктів
Додаток Г
Блок-схема алгоритму розпізнавання
Похожие работы
... для підставки, що знімається разом із кришкою, але зустрічається і кріплення підставки на основну конструкцію, що несе плату електроніки і ЭЛТ. Другий варіант менш зручний для подальшого ремонту, тому що підставка закриває доступ до елементів плати. Кріплення задньої кришки, як правило, виробляється за допомогою 4-х винтов-саморезов, але зустрічаються випадки з застосуванням додаткових гвинтів і ...
... фотонасвітлювачі. 4. Офсетна попередньо чутлива пластина Для виготовлення друкарських офсетних форм позитивного копіювання. Схема технологічного процесу виготовлення офсетних друкарських форм для друкування журнальної продукції Ознайомлення з оригіналом і бажаннями замовника Складання тексту Сканування і обробка чорно-білих ілюстрацій Верстка журнальних сторінок ...





... технологи НДІ постійно працюють з технологами КБ (більш детально питання розробки будуть розглянуті нижче). Технологи КБ повинні знати основи економіки даного виробництва і ціноутворення вироби для того, щоб розроблювальний технологічний процес дозволяв випускати продукцію більш низькою собівартістю, ніж аналоги. Розроблена технологічна документація з КБ надходить до служби головного технолога, ...
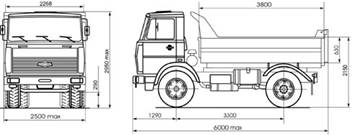
... чином, мають подвійне керування. Характеристика автомобіля-самоскида МАЗ 555102-220 Рис. 1. Автомобіль-самоскид МАЗ 555102-220 Технічна характеристика автомобіля МАЗ 555102-220 Колісна формула 4х2 Повна маса автомобіля, кг 18000 Розподіл повної маси на передню вісь, кг 6500 Розподіл повної маси на задню вісь, кг 11500 Двигун ЯМЗ-236НЕ2 (ЄВРО-2) Потужність двигуна, кВт ...
0 комментариев