Навигация
Блок керування для блока первинного центрування зображення
21913
знаков
3
таблицы
4
изображения
Міністерство освіти і науки України
Вінницький національний технічний університет
Інститут автоматики, електроніки та комп’ютерних систем управління
Кафедра лазерної та оптоелектронної техніки
БЛОК КЕРУВАННЯ ДЛЯ БЛОКА ПЕРВИННОГО ЦЕНТРУВАННЯ ЗОБРАЖЕННЯПояснювальна записка з дисципліни
"Цифрові пристрої та мікропроцесори"
до курсового проекта за спеціальністю
"Лазерна і оптоелектронна техніка"
08-04.ЦПМП.000.00.000 ПЗ
Вінниця ВНТУ 2009
Міністерство освіти і науки України
Вінницький національний технічний університет
Кафедра лазерної та оптоелектронної техніки
ЗАТВЕРДЖУЮ
Зав. каф. ФЕЛТ, д.т.н., проф.
ІНДИВІДУАЛЬНЕ ЗАВДАННЯ
на курсовий проект з дисципліни "Цифрові пристрої та мікропроцесори"
Тема: Блок керування для блока первинного центрування зображення
Зміст графічної частини:
1. Блок-схема алгоритму розпізнавання (формат А4)
2. Блок-схема алгоритму блока первиного центрування зображення (формат А4)
3. Синтезована блок – схема алгоритму (формат А4)
4. Схема електрична структурна (формат А4)
5. Функціональна схема (формат А4)
6. Схема електрична принципова (формат А4)
Зміст пояснювальної записки:
Вступ, Аналіз та інженерна інтерпретація технічного завдання, Розробка структурної схеми, Розробка схеми_електричної принципової, Розробка програмного забезпечення, Висновки,Література.
ТЕХНІЧНЕ ЗАВДАННЯ
На розробку пристрою: Блок керування для блока первинного центрування зображення
1. Область застосування приладу: в пристроях автоматики, а також в цифрових обчислювальних машинах.
2. Основа для розробки – робочий навчальний план дисципліни "Цифрові пристрої та мікропроцесори".
3. Мета та призначення розробки: а) мета розробки – отримання практичних навичок розробки приладів на основі цифрових пристроїв та мікропроцесорів; б) призначення розробки – навчальний курсовий проект з дисципліни ЦПМП.
4. Джерела розробки – індивідуальне завдання на курсовий проект
5. Технічні вимоги
Вступ
Теоретичні основи, методи та алгоритми розпізнавання досить розповсюджені для вирішення різноманітних задач автоматизації виробництва, в тому числі, і в технологічних роботизованих комплексах.
Цифрова обробка зображень набуває великого значення в багатьох областях діяльності людини в даний час. Дійсно, зображення як форма найбільш повного представлення інформації не тільки не можливо замінити, наприклад, в такому винятковому випадку, як дослідження поверхні тієї або іншої планети, але і в буденному житті. Воно є об'єктом дослідження або його результатом в космонавтиці, астрономії, біології, медицині, фізиці, геології, криміналістиці і дефектоскопії.
Зображення можна отримати не лише в діапазоні частот електромагнітного випромінювання, що відповідає видимому світлу, але і в діапазоні частот акустичному, інфрачервоному, ультразвуковому, ультрафіолетовому, рентгенівських і гамма-променів. Засоби їх формування і реєстрації відрізняються великою різноманітністю (фото- і оптико-електронні сканери, радіолокаційні і лазерні пристрої). З їх допомогою можна, наприклад, отримати на Венері зображення її поверхні або представити у видимій формі людську мову.
Техніка передачі зображень досягла на даний час високого рівня. Для передачі зображень використовується оптична, дротяна, радіо і інші види зв'язку. Теоретично і експериментально доведена можливість високоякісної передачі відеоінформації на відстані в декілька десятків і навіть сотень мільйонів кілометрів. Технічно здійсненною представляється в даний час і завдання створення глобальної системи зв'язку для передачі зображень [1].
Висока ступінь вірогідності розпізнання, перш за все, залежить від правильної організації тісно пов’язаних між собою систем відчуття та інтелектуалізації управління.
Отже, при розробці гнучких робототизованих комплексів ставлять за мету створення ефективних сенсорних систем та алгоритмів обробки інформації. Інформацію, необхідну для виконання цього завдання, забезпечує система відчуття – найголовніша підсистема адаптивного робота, джерелом інформації для якої служить система технічного зору (СТЗ).
У зв’язку з тим, що СТЗ забезпечують найбільш високу інформативність щодо сприйняття, аналізу та обробки зображень, область застосування таких систем досить широка: автоматизація операцій збирання, візуального контролю, дефектоскопія деталей, вузлів тощо [2-4].
1. Аналіз теми і інтерпретація технічного завдання
Визначальним фактором для виконання функцій СТЗ у реальному часі є ознаки, за якими виконується ідентифікація об'єктів, що здебільшого пов’язано з необхідністю виконання великого обсягу машинних процедур, в тому числі, наявності в ЕОМ великого обсягу оперативної та інших видів пам’яті.
Перспективними в СТЗ для промислових роботів є різні алгоритми, які дозволяють створювати еталони на етапі навчання для певних положень об’єкта або особливостей (симетрії) самого об’єкта. В якості еталонів можуть бути не лише окремі ознаки, а шаблони зображень, для ідентифікації яких виконують накладення зображення на еталон. У загальному вигляді процедура складається з об'єднання результатів аналізу зображень або їх геометричних особливостей [1-5].
В даній роботі увага приділена особливостям розпізнавання симетричних об'єктів за моментними ознаками з формуванням еталонів об'єктів [6-9]. Сам процес формування результуючих сигналів класифікації вхідних зображень об'єктів передбачає такі етапи розпізнавання (рис. 1).
Відомо, що підхід до вибору математичної моделі зображення передбачає спосіб опису зображення, при цьому наскільки універсальним є спосіб опису зображення, настільки простішим буде виділення системи ознак, які містять інформацію про зображення [8, 10-13]. Джерелом інформації поля зору СТЗ служить світловий потік, який в даному разі описується функцією яскравості. Отже, на виході системи формування зображень утворюється відеосигнал, що відповідає яскравості об’єкта, який знаходиться в полі зору. Тому функцією такої "інтелектуалізації" є об’єднання процедур обробки зображень оптичними блоками та формування відповідних сигналів блоком керування з врахуванням певних особливостей (симетрії) зображень [14,15].
Первинне центрування дозволяє визначити центр тяжіння об’єкта

Рисунок. 1 - Етапи розпізнавання
Тому, в даному курсовому проекті буде проведена оптимізація пристрою керування для системи розпізнавання зображень за його геометричними ознаками із виділенням симетричності зображень об’єктів.
Похожие работы
... для підставки, що знімається разом із кришкою, але зустрічається і кріплення підставки на основну конструкцію, що несе плату електроніки і ЭЛТ. Другий варіант менш зручний для подальшого ремонту, тому що підставка закриває доступ до елементів плати. Кріплення задньої кришки, як правило, виробляється за допомогою 4-х винтов-саморезов, але зустрічаються випадки з застосуванням додаткових гвинтів і ...
... фотонасвітлювачі. 4. Офсетна попередньо чутлива пластина Для виготовлення друкарських офсетних форм позитивного копіювання. Схема технологічного процесу виготовлення офсетних друкарських форм для друкування журнальної продукції Ознайомлення з оригіналом і бажаннями замовника Складання тексту Сканування і обробка чорно-білих ілюстрацій Верстка журнальних сторінок ...





... технологи НДІ постійно працюють з технологами КБ (більш детально питання розробки будуть розглянуті нижче). Технологи КБ повинні знати основи економіки даного виробництва і ціноутворення вироби для того, щоб розроблювальний технологічний процес дозволяв випускати продукцію більш низькою собівартістю, ніж аналоги. Розроблена технологічна документація з КБ надходить до служби головного технолога, ...
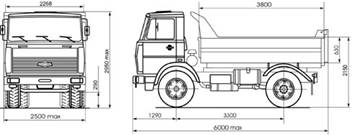
... чином, мають подвійне керування. Характеристика автомобіля-самоскида МАЗ 555102-220 Рис. 1. Автомобіль-самоскид МАЗ 555102-220 Технічна характеристика автомобіля МАЗ 555102-220 Колісна формула 4х2 Повна маса автомобіля, кг 18000 Розподіл повної маси на передню вісь, кг 6500 Розподіл повної маси на задню вісь, кг 11500 Двигун ЯМЗ-236НЕ2 (ЄВРО-2) Потужність двигуна, кВт ...
0 комментариев