Навигация
РАЗРАБОТКА РЕЛЕЙНОГО РЕГУЛЯТОРА
11356
знаков
2
таблицы
22
изображения
6. РАЗРАБОТКА РЕЛЕЙНОГО РЕГУЛЯТОРА
Для конструкции релейного регулятора используется блок «Релейная неоднозначная с зоной нечувствительности». Наглядная схема приведена на рисунке 7.
Значение параметров ступенчатого входного воздействия:
1) Время «включения» скачка t=0;
2) Значение сигнала до скачка Y0=0;
3) Значение сигнала после скачка YK=40;
Значение параметров статической характеристики реле
a1, a2, b1, b2, y1, y2 - -3.5 -3.5 3.5 3.5 -70 70;
Ниже (рисунок 6.1) приведена схема системы с включением блока реле неоднозначное с зонами нечувствительности (выполнена с помощью ПО ПК «МВТУ»).

Рисунок 6.1 – Схема системы с включением блока реле
В этом случае график процесса, протекающего в системе, будет выглядеть следующим образом (рисунок 6.2):
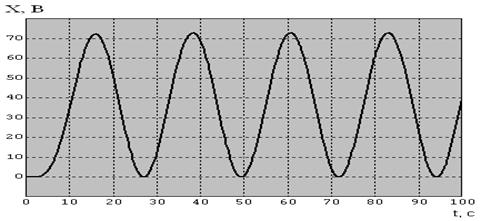
Рисунок 6.2 - График процесса, протекающего в системе при подключении реле
Фазовый портрет представлен на графике (рис. 6.3):

Рисунок 6.3 – Фазовый портрет процесса, протекающего в системе при подключении реле
Как следует из приведённых выше графиков, в системе возникают незатухающие колебания. Амплитуда колебаний зависит от начальных условий и, следовательно, эти колебания являются автоколебаниями. Для устранения колебаний необходимо ввести в систему обратную связь с апериодическим звеном первого порядка и сумматором. Обратная связь необходима для того, чтобы предсказать время отключения реле в момент, когда оно ещё не достигло зоны нечувствительности.
Схема линейного регулятора (выполнена в программе ПК «МВТУ») изображена на рисунке 6.4.
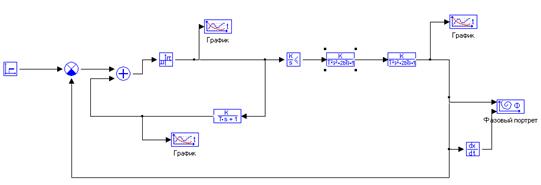
Рисунок 6.4 – Схема релейного регулятора
Таким образом был сконструирован релейный регулятор, обеспечивающий перевод объекта из начального состояния xн=0 в конечное состояние xк=40 В. Теперь можно приступить к оптимизации структуры и подбору численных значений.
7. ВЫБОР СТРУКТУРЫ И ПАРАМЕТРОВ
Как уже было показано, в качестве оптимальной структуры релейного регулятора может быть использована структура, обоснованная в п.6 (рис. 6.4).

Рисунок 7.1 – Схема релейного регулятора
В качестве численных значений изменяемых параметров структуры – значение коэффициентов и постоянной времени апериодического звена первого порядка. По умолчанию значение параметров:
1) Вектор коэффициентов – 1;
2) Вектор постоянных времени Т, с – 1;
При таких значениях график процесса, протекающего в системе будет выглядеть следующим образом:
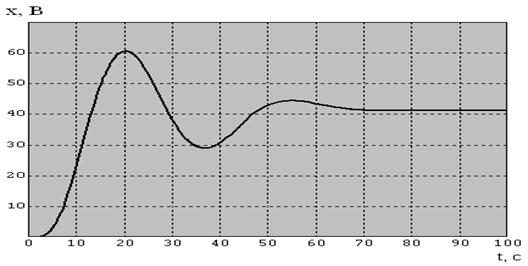
Рисунок 7.2 – График процесса, протекающего в системе
Фазовый портрет процессов представлен на рисунке 7.3
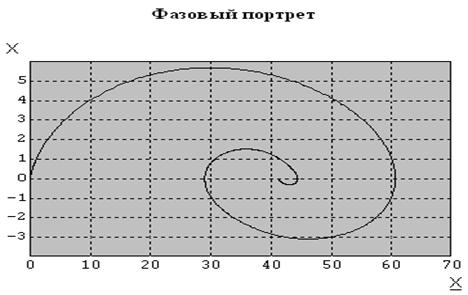
Рисунок 7.3 – Фазовый портрет процессов, протекающих в системе
На рисунке 7.2 видно ,что присутствие обратной связи с апериодическим звеном 1-го порядка выводит систему из колебательного состояния, т.е. обратная связь останавливает реле до того как оно вошло в зону чувствительности.
Рисунок 7.3 представляет собой фазовый портрет системы.
Анализ графика (рис.6.2) даёт следующие результаты:
хуст=40 B,![]() =±3,5 B.
=±3,5 B.
tн= 69.43 c. Достигается при t = хуст.
xmax = 61.1311 B. Достигается при t = 18.6964 c
![]() %
%
Составим передаточную функцию замкнутой обратной связи:
![]()
Необходимо согласовать какое постоянное время необходимо поставить. Для этого решим уравнение, представленное формулой (3), из которого можно вычислить постоянное время (T).
![]() , где (3)
, где (3)
y – выходной сигнал,
x – входной сигнал,
t – время за которое входной сигнал доходит до 70 В.
Так как входной сигнал равен 70В, выходной сигнал равен 40, время за которое входной сигнал доходит до 70В равно 3 секунды (время берется из рисунка 7.4)

Рисунок 7.4 – График сигнала, преобразованного звеном обратной связи.
Подставим значение в (3):
![]() с.
с.
Подставим в апериодическое звено постоянное время равное 1,7 секунды. Посмотрим поведения переходного процесса при таких параметрах:
1.
1) Вектор коэффициентов – 1;
2) Вектор постоянных времени Т, с – 1,7;

Рисунок 7.5 – График процесса, протекающего в системе
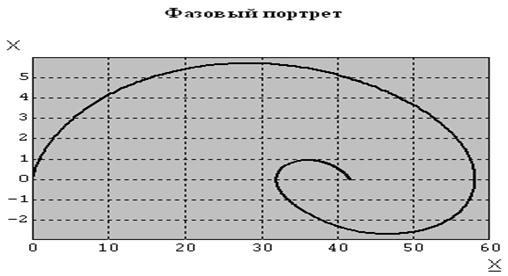
Рисунок 7.6 – Фазовый портрет процессов, протекающих в системе
В переходном режиме качество системы не удовлетворяет требованиям, следовательно, чтоб в замкнутой системе регулирования имели место плавные (без перерегулирования) и быстрые переходные процессы необходимо увеличить коэффициент усиления звена, что понизит колебательный процесс.
2.
1) Вектор коэффициентов – 2;
2) Вектор постоянных времени Т, с – 1,7;
При таких значениях график процесса, протекающего в системе будет выглядеть следующим образом:

Рисунок 7.8 – График процесса, протекающего в системе
Фазовый портрет процессов представлен на рисунке 7.9

Рисунок 7.9 – Фазовый портрет процессов, протекающих в системе
Анализ графика (рис.7.8) даёт следующие результаты:
хуст=40 B,![]() =±3,5 B.
=±3,5 B.
tн= 20.55 с. Достигается при t = хуст.
xmax = 41.09 B. Достигается при t = 27.65 c
![]() %, что находится в рамках допустимого.
%, что находится в рамках допустимого.
Таким образом была выбрана структура и численные значения параметров для обеспечения в замкнутой системе регулирования плавных (без перерегулирования) и быстрых переходных процессов, ошибка регулирования не превышает 3.5 В.
Таким образом была выбрана структура и численные значения параметров для обеспечения в замкнутой системе регулирования плавных (без перерегулирования) и быстрых переходных процессов, ошибка регулирования не превышает 3.5 В. Параметры указаны в Таблице 2.
Таблица 2 – Подобранные параметры для звена обратной связи
| Коэффициент усиления | 2 |
| Постоянная времени | 1.7 |
| Вектор начальных условий | 0 |
ВЫВОДЫ
В процессе написания курсовой работы был проведён анализ динамических свойств отдельно объекта управления и системы управления в целом, данных в задании, при помощи программы ПК «МВТУ», позволяющей вести расчёты в системах управления, сконструированных непосредственно в программе.
На базе данной системы управления был сконструирован релейный регулятор, к которому были подобраны параметры, отвечающие требованиям задания, что позволило понять на практике каким образом действуют релейные регуляторы и осуществляется переходной процесс в системе управления.
ЛИТЕРАТУРА
1. Бесекерский В.А.Теория систем автоматического регулирования.1975;
2. Попов Е.П. Теория линейных систем автоматического регулирования и управления.1989
Похожие работы
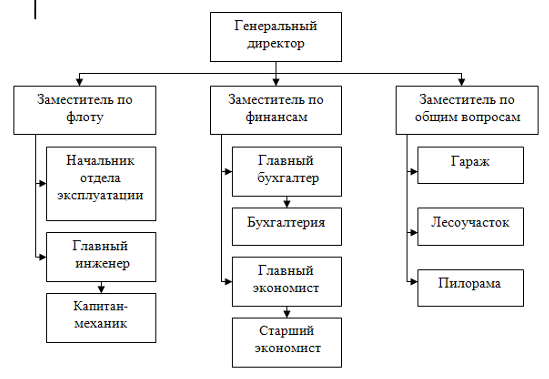
... т.к. во главе каждого структурного подразделения находится руководитель единый начальник, сосредоточивший в своих руках все функции управления. 3.3 Анализ достоинств и недостатков существующей системы управления При линейной структуре управления, такой как у ОАО «Киренский речной порт», каждое звено и каждый подчиненный имеет одного руководителя. Все решения передается по цепочке сверху вниз ...
... -психологический климат все это на самом деле способствует разрешению рабочих проблем. Значимым аспектом работы с персоналом является формирование позитивного облика компании "Марс" в глазах его сотрудников, его превосходства над конкурентами. Система управления персоналом. Использование партисипативных систем управления (от англ.participation - участие). Улучшает результаты своей деятельности ...
... капитала предприятия (определяющая эффективность использования вложенных в предприятие средств) возросла на 0,071 с -0,046 до 0,025. Глава 2. Анализ существующей системы управления. По моему глубокому убеждению, анализ системы управления на предприятии нельзя рассматривать однобоко. Комплексный и только комплексный анализ может объективно отразить структуру и характер отношений ...
... работе необходимо исследовать те уровни представления структуры СУ, которые характеризуются информационными связями. Описание структуры «Сбербанк» представлено в таблице 1.1. Таблица 1.1– Описание СУ «Общежитие» Элемент системы управления Атрибуты элемента Связи Атрибуты связи Элемент по нотации Гейна-Сарсона 1 - Ректорат подписание и утверждение приказов Директор студгородка ...
0 комментариев