Навигация
3. ВВЕДЕНИЕ
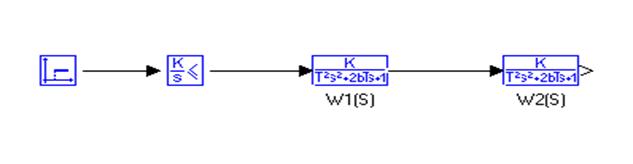
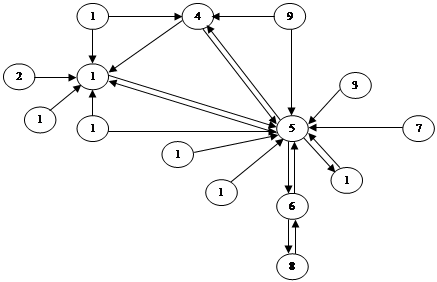
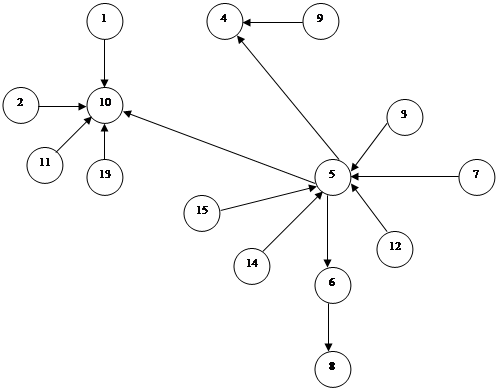
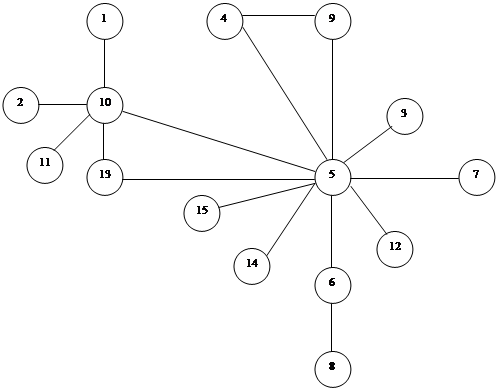
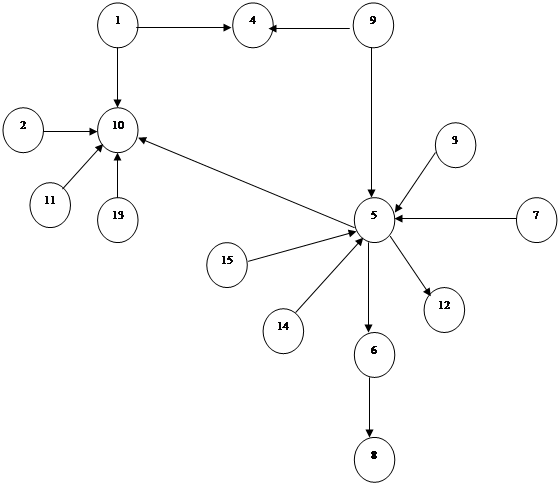
На рисунке 1 приведена структурная схема последовательного соединения исполнительного механизма и объекта управления. Необходимо перевести данную схему в блоки программного продукта МВТУ. При этом используется ограничения механизма постоянной скорости (1) и численные значения параметров исполнительного механизма и объектов управления, приведенные в таблице 1.
Наглядное изображение исполнительного механизма и объекта управления приведены на рисунке 3.1.
|
|
4. АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТВ ОБЪЕКТА УПРАВЛЕНИЯ
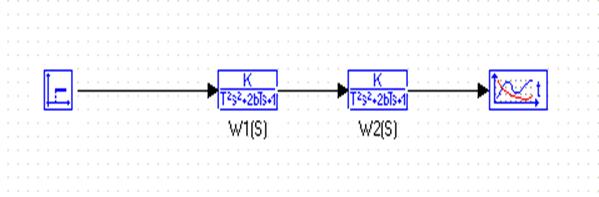
Для проведения анализа динамических свойств объекта управления при скачкообразном изменении U от 0 до 70 В при t=0 необходимо в МВТУ смоделировать один только объект управления и добавить временный график для просмотра поведения переходных процессов на каждом шаге интегрирования. Наглядное представление показано на рисунке 4.1.
|
Значение параметров ступенчатого входного воздействия:
1) время «включения» скачка T=0;
2) значение сигнала до скачка Y0=0;
3) значение сигнала после скачка YK=70.
График ступенчатого входного воздействия приводится на рисунке 4.2.

Рисунок 4.2 – График входного сигнала
График переходного процесса показан на рисунке 4.3.
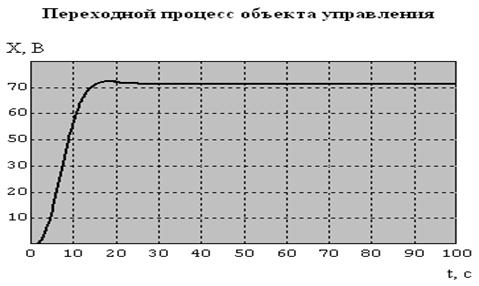
Рисунок 4.3 - Переходной процесс, протекающий в объекте управления объекта управления
Исходя из рисунка 4.3, можно провести анализ динамических свойств объекта управления
Высчитаем перерегулирование переходного процесса объекта управления. Для этого высчитаем максимум данной функции (используем список в МВТУ) и воспользуемся формулой (2).
![]()
Переходной процесс системы не превышает значение ошибки регулирования, значит процесс осуществляется бес перерегулирования.
хуст=70 B,![]() =±3,5 B.
=±3,5 B.
tн= 22,44 c. Достигается при t = хуст.
xmax = 71.16 B. Достигается при t = 18.54 c.
5. АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТ ПОСЛЕДОВАТЕЛЬНОГО СОЕДИНЕНИЯ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА И ОБЪЕКТА УПРАВЛЕНИЯ
Для проведения анализа динамических свойств последовательного соединения исполнительного механизма и объекта управления при скачкообразном изменении Up от 0 до 70 В при t=0 до -70 при t=40c, необходимо в МВТУ смоделировать последовательное соединение объекта управления и исполнительный механизм, добавить временный график для просмотра поведения переходных процессов на каждом шаге интегрирования. Наглядное представление показано на рисунке 5.1.

Рисунок 5.1 - Исполнительный механизм и объект управления.
График ступенчатого входного воздействия изображён на рисунке 5.2.

Рисунок 5.2 – График входного сигнала
График сигнала, преобразованного исполнительным механизмом, изображён на рисунке 5.3.

Рисунок 5.3 - График сигнала, преобразованного исполнительным механизмом
График переходного процесса, протекающего в системе управления, изображён на рисунке 5.4.

Рисунок 5.4 - График переходного процесса, протекающего в системе управления
Анализ динамических свойств последовательного соединения исполнительного механизма и объекта управления при скачкообразном изменении Up от 0 до 70 В при t=0 до -70 при t=40c проводится с помощью данных, на основании которых построен график на рисунке 5.4.
На графике можно выделить два периода. Первый – от 0 до 40 с, второй скачок начинается от 40с. Но для анализа системы достаточно проанализировать один (любой) из участков по причине того, что основные параметры периодов будут совпадать.
Проанализируем первый период:
хуст=70 B,![]() =±3,5 B.
=±3,5 B.
tн= 22,44 c. Достигается при t = хуст.
xmax = 79.39 B. Достигается при t = 18.77 c.
Высчитаем перерегулирование:
![]()
Переходной процесс системы превышает значение ошибки регулирования, значит процесс осуществляется с перерегулированием.
Похожие работы
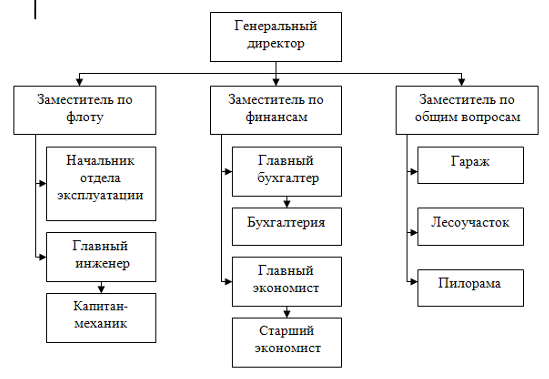
... т.к. во главе каждого структурного подразделения находится руководитель единый начальник, сосредоточивший в своих руках все функции управления. 3.3 Анализ достоинств и недостатков существующей системы управления При линейной структуре управления, такой как у ОАО «Киренский речной порт», каждое звено и каждый подчиненный имеет одного руководителя. Все решения передается по цепочке сверху вниз ...
... -психологический климат все это на самом деле способствует разрешению рабочих проблем. Значимым аспектом работы с персоналом является формирование позитивного облика компании "Марс" в глазах его сотрудников, его превосходства над конкурентами. Система управления персоналом. Использование партисипативных систем управления (от англ.participation - участие). Улучшает результаты своей деятельности ...
... капитала предприятия (определяющая эффективность использования вложенных в предприятие средств) возросла на 0,071 с -0,046 до 0,025. Глава 2. Анализ существующей системы управления. По моему глубокому убеждению, анализ системы управления на предприятии нельзя рассматривать однобоко. Комплексный и только комплексный анализ может объективно отразить структуру и характер отношений ...
... работе необходимо исследовать те уровни представления структуры СУ, которые характеризуются информационными связями. Описание структуры «Сбербанк» представлено в таблице 1.1. Таблица 1.1– Описание СУ «Общежитие» Элемент системы управления Атрибуты элемента Связи Атрибуты связи Элемент по нотации Гейна-Сарсона 1 - Ректорат подписание и утверждение приказов Директор студгородка ...
0 комментариев