Описание технологического процесса, как объекта управления
Классификация и перечень технологических переменных, анализ видов связи между технологическими переменными
Каналов ввода/вывода
Классификация и перечень управляющих воздействий, определение требуемой точности управления ТП
Функциональная структура системы управления ТП. Описание функциональных блоков системы
Математическое моделирование системы управления технологическим процессом
Структурный и параметрический синтез регуляторов системы управления технологическим процессом
Разработка алгоритмов работы регуляторов системы управления технологическим оборудованием
Навигация
Разработка алгоритмов работы регуляторов системы управления технологическим оборудованием
Автоматическая система управления процессом испытаний электропривода лифтов
63311
знаков
3
таблицы
31
изображение
3.3 Разработка алгоритмов работы регуляторов системы управления технологическим оборудованием
Для решения задачи формирования нагрузочного момента, имитирующего усилия, прикладываемые к ЭП лифта со стороны технологического оборудования, используем специально разработанный модуль для имитации нагрузочных моментов с программной реализацией. Здесь и далее в работе под определением данного модуля будем подразумевать имитационный формирователь моментов нагрузки (ИФМН).
В соответствии с требованиями к работе испытательного стенда, сигнал на выходе ИФМН должен полностью имитировать рабочие режимы различных типов лифтов. Кроме того, ИФМН должен однозначно определять работу системы в одном из двух режимов: формирование нагрузочного момента в движении и при упоре, что требует наличия переключающего модуля, отвечающего за организацию переходов между указанными режимами. В данном случае задача формулируется следующим образом: для имитации нагрузочных усилий необходимо сформировать нагрузочный момент Мнагр в функции углового перемещения выходного вала ЭП ![]() . В случае отключения или остановки испытуемого ЭП, ИФМН должен предотвратить возможное «опрокидывание» моментного ЭП и выдать команду на переход в следящий режим с нулевым заданием или выполнить останов ЭП.
. В случае отключения или остановки испытуемого ЭП, ИФМН должен предотвратить возможное «опрокидывание» моментного ЭП и выдать команду на переход в следящий режим с нулевым заданием или выполнить останов ЭП.
3.4 Компьютерное моделирование алгоритмов управления. Графическое представление результатов моделирования
После проведения оптимизации отдельных контуров системы управления необходимо провести проверку показателей качества всей системы нагрузочного ЭП. Данный режим не принимает во внимание различные нелинейности, присущие системе любого ЭП и предполагает рассмотрение системы в линеаризованном виде. На рисунке 28 представлена структурная схема линеаризованного асинхронного ЭП с векторным управлением на основе имитационной модели АД во вращающейся системе координат с ориентацией по вектору потокосцепления ротора, т.е. в данном случае и система управления, и модель АД, как управляемый объект, находятся в одной и той же вращающейся системе координат.
Исследование показателей качества имитационной модели ЭП в представленном виде позволяет проверить работоспособность и оценить взаимное влияние перекрёстных контуров управления потокосцеплением ротора и скорости. Используя программную среду Simulink-Matlab на базе структурной схемы рисунка 28 разработаем имитационную модель линеаризованного асинхронного ЭП с векторным управлением. На рисунке 29 представлен внешний вид имитационной модели в среде Simulink-Matlab для расчёта переходных процессов.


На рисунке 30 представлены графики переходных процессов при последовательной подаче задающего сигнала в контуры потокосцепления и скорости. В первую очередь ступенчатый сигнал задания поступает на вход контура потокосцепления, и только по окончании переходных процессов в данном контуре система формирует следующий задающий сигнал для контура скорости. Данная задержка позволяет ещё перед началом движения стабилизировать магнитное состояние АД и способствует приближению переходных процессов по характеру к переходным процессам в ЭП с двигателем постоянного тока независимого возбуждения. В теории асинхронного ЭП задержку с подачей задания в контур скорости подобного вида принято называть начальным намагничиванием.
Условия для проведения исследований на рисунке 30 соответствуют пуску ЭП без нагрузки и её последующему набросу в момент времени tнагр = 45 о.е. с моментом mнагр = 1.0 о.е., соответствующем номинальной нагрузке.
Анализ переходных процессов применительно к оценке взаимного влияния перекрёстных контуров потокосцепления ротора и скорости показывает, что наибольшее влияние оказывает переходный процесс в контуре скорости, вызывая отклонение потокосцепления ротора от установившегося значения на величину ![]() и
и ![]() . Относительно переходных процессов в контуре потокосцепления, можно заключить, что значительное влияние на отклонения в контуре скорости, как и ожидалось, отсутствует.
. Относительно переходных процессов в контуре потокосцепления, можно заключить, что значительное влияние на отклонения в контуре скорости, как и ожидалось, отсутствует.

Рисунок 30 – Переходные процессы в линеаризованном асинхронном ЭП с векторным управлением на базе имитационной модели АД во вращающейся системе координат с ориентацией по вектору потокосцепления ротора
Для приближения условий исследования имитационной модели нагрузочного моментного ЭП к реальному объекту следует модернизировать линеаризованную систему с возможностью учёта нелинейностей обусловленных наложением всевозможных ограничений и задатчиков интенсивности.
Применительно к нагрузочному моментному асинхронному ЭП следует выделить следующие нелинейности: ограничение на выходе регуляторов, линейные задатчики интенсивности в каналах управления потокосцеплением ротора и скоростью, двухмассовая механическая система с упругой связью, зазоры в кинематической цепи механической передачи.
Используя в качестве основы линеаризованную структурную схему имитационной модели нагрузочного ЭП (рисунок 28) разработаем соответствующую систему с учётом указанных выше нелинейностей. Для проведения исследований и получения предварительной оценки качества функционирования разработанной системы в программной среде Simulink-Matlab создана имитационная модель асинхронного нагрузочного моментного ЭП с векторным управлением.
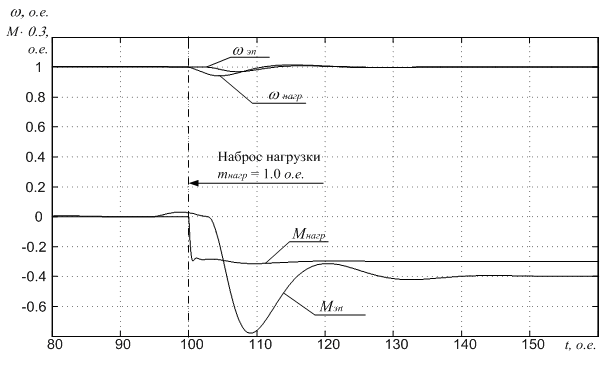
Рисунок 31 – Графики переходных процессов в системе нагрузочного моментного ЭП с векторным управлением при учёте нелинейностей для случая работы в режиме движения
На рисунке 31 представлены результаты исследования системы нагрузочного моментного ЭП с векторным управлением при учёте нелинейностей для случая работы в режиме движения.
На рисунке 32 представлены графики переходных процессов в имитационной модели моментного асинхронного ЭП при имитации нагрузочных усилий в режиме упора.
Анализ графиков переходных процессов на рисунке 31 и рисунке 32 показывает, что нагрузочный моментный ЭП в полном объёме выполняет имитационное формирование усилий, прикладываемых со стороны ЭП лифта и соответствует требованиям, предъявляемым к нагрузочному ЭП при проведении испытаний электроприводов лифтов.

Рисунок 32 – Графики переходных процессов в имитационной модели моментного асинхронного ЭП при имитации нагрузочных усилий ЗА в режиме упора
Заключение
В представленном курсовом проекте была спроектирована автоматизированная система управления процессом испытаний электропривода лифтов. Испытательное нагрузочное устройство позволяет сымитировать диаграмму эксплуатационных усилий, прикладываемых со стороны лифтов различных типов.
Целью работы было получение начальных навыков проектирования автоматизированных систем управления электроприводов.
Разрабатываемая система управления позволит автоматизировать технологический процесс испытания электропривода лифтов, существенно снизить затраты на проведение испытаний. Данная система особенно актуальна при серийном производстве ЭП лифтов. Также данная система построена на микропроцессорной системе управления, позволяющей значительно улучшить качество управления.
В ходе выполнения работы были выбраны аппаратные средства на верхнем, среднем и нижнем уровне управления. Произведёт выбор программного обеспечения для программирования логического контроллера и преобразователя частоты.
Выполнена оптимизация контуров системы векторного управления применительно к режимам работы в составе нагрузочного ЭП с учётом допущений относительно постоянных времени высших порядков в передаточных функциях объектов управления, что позволяет существенно упростить синтез структуры и параметров регуляторов. Предложенная методика позволяет получить от системы показатели качества, приближенные к ожидаемым значениям, а для уменьшения взаимного влияния между контурами управления потокосцеплением ротора и скорости предложена методика разделения перекрёстных контуров во временной области благодаря выбору в смежных контурах различных малых некомпенсируемых постоянных времени.
С помощью метода имитационного моделирования произведена проверка функционирования разработанной системы векторного управления асинхронным моментным ЭП. Анализ полученных результатов применительно к оценке взаимного влияния перекрёстных контуров потокосцепления ротора и скорости показывает, что для потокосцепления ротора максимальные отклонения не превышают величины ![]() при изменении частоты вращения и
при изменении частоты вращения и ![]() при приложении возмущения со стороны нагрузки.
при приложении возмущения со стороны нагрузки.
Применительно к контуру скорости, сколько-нибудь значительное влияние со стороны контура потокосцепления ротора отсутствует.
Результаты исследований работы имитационной модели системы нагрузочного моментного ЭП с векторным управлением при учёте нелинейностей для случая работы в режиме движения и при упоре доказывают правильность выполненной работы и создают предпосылки для перехода к созданию системы управления реальным асинхронным моментным ЭП с микроконтроллерным управлением.
В дальнейшем планируется использование данной системы автоматического управления процессом испытания электропривода лифтов для организации и проведения испытаний серийно выпускаемых ЭП лифтов. Проведение испытаний в автоматизированном режиме позволит существенно сэкономить время, необходимое для проверки ЭП лифтов при одновременном улучшении качества настройки, что в итоге улучшает режимы работы ЭП и повышает безопасность эксплуатации лифтов.
Список литературы
1. Антропов А.А., Гарганеев А.Г., Каракулов А.С., Ланграф С.В., Нечаев М.А. Опыт разработки преобразователя частоты для асинхронного электропривода общепромышленного применения//Электротехника. № 9. 2005. С.23-26
2. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392 с.
3. Белов М.П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: Учебник для вузов – М.: Академия, 2004. – 576 с.
4. Бесекерский В.А., Попов Е.В. Теория систем автоматического управления. Изд. 4-е, перераб. и доп. – СПб, Изд-во «Профессия», 2004. – 752с.
5. Гарганеев А.Г., Ланграф С.В. Стенд для нагрузочных испытаний электроприводов. Материалы III-ей Всероссийская научно-практической конференции «Автоматизированный электропривод и силовая электроника» (АЭПЭ-2006), Новокузнецк 2006.
6. Ключев В.И. Теория электропривода: Учеб. для вузов. – 2-е изд.перераб.и доп. – М.: Энергоатомиздат, 2001. – 704 с.
7. Ковач К.П., Рац И. Переходные процессы в машинах переменного тока/ Пер. с нем. М. Л.: Госэнергоиздат, 1963. 735 с.
8. Копылов И.П. Математическое моделирование электрических машин. – М.: Высшая школа, 2001. – 274 с.
9. Ланграф С.В. Косвенное определение момента в асинхронном электроприводе. Труды X-ой Международной научно-практической конференции студентов, аспирантов и молодых учёных «Современные техника и технологии», ТПУ, Томск 2004г.
10. Ланграф С.В. Оптимизация систем векторного управления асинхронных электроприводов. Материалы XII-ой Международной научно-практической конференции студентов и молодых ученых «Современные техника и технологии» (СТТ-2006), Изд-во ТПУ, 2006, С. 68-70..
11. Удут Л.С., Мальцева О.П., Кояин Н.В. Проектирование и исследование автоматизированных электроприводов. Часть 1. – Введение в технику регулирования линейных систем. Часть 2. – Оптимизация контура регулирования: Учебное пособие. – Томск: Изд. ТПУ, 2000. -144.
12. Удут Л.С., Мальцева О.П., Кояин Н.В. Проектирование и исследование автоматизированных электроприводов. Часть 6. – Механическая система электропривода постоянного тока: Учебное пособие. – Томск: Изд. ТПУ, 2004. -144с.
13. Чернышев А.Ю., Ланграф С.В., Чернышев И.А. Исследование систем скалярного частотного управления асинхронным двигателем: методические указания к выполнению лабораторных и практических работ по курсу "Электропривод переменного тока" для студентов специальности 180400. Томский политехнический университет. — Томск : Изд-во ТПУ, 2002. – 23 с.
14. Энергосберегающий асинхронный электропривод: Учеб. пособие для студ.высш. учеб. заведений / И.Я. Браславский, З.Ш. Ишматов, В.Н. Поляков; под ред. И.Я. Браславского.– М.: Издательский центр «Академия», 2004. – 256с.
15. Langraf S.V., Obraztsov K.V. Optimization of vector control system induction motor drives. Modern techniques and technologies. MTT-2006. Proceedings of the 12-th International Scientific and Practical Conference of Students, Postgraduates and Young Scientists, 27-31 March, 2006 Tomsk, Russia. TPU, – P. 68-70.
Похожие работы

... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
... большей стабильности платформы может быть установлено два варианта стабилизатора: система блокировки подвески и опускающийся на землю позади машины стабилизатор. По сравнения с обычными 120-мм минометными системами, «SRAMS» обладает рядом характеристик, позволяющих увеличить ее скорострельность. В том числе установлена полуавтоматическая система подачи снарядов и запатентованный клапан зарядного ...
... . Большой вклад в развитие таких электроприводов вносят коллективы институтов Тяжпромэлектропроект, Укртяжпромэлектропроект и др. 2 Теории и практики автоматизированного электропривода Электрический привод обеспечивает все отрасли народного хозяйства механической энергией, полученной из электрической, осуществляет практически все технологические операции, связанные с механическим движением, во ...

... навыки у докеров. 23. СИСТЕМА ОБЕСПЕЧЕНИЯ ПЕРЕГРУЗОЧНЫХ РАБОТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКОЙ Система обеспечения оснасткой технологических процессов портовых перегрузочных работ включает: планирование поставки и производство механизмов и приспособлений; содержание их в исправном состоянии, т. е. регистрацию, освидетельствование с испытанием, периодические осмотры, техническое обслуживание и ...
0 комментариев