Описание технологического процесса, как объекта управления
Классификация и перечень технологических переменных, анализ видов связи между технологическими переменными
Каналов ввода/вывода
Классификация и перечень управляющих воздействий, определение требуемой точности управления ТП
Функциональная структура системы управления ТП. Описание функциональных блоков системы
Математическое моделирование системы управления технологическим процессом
Структурный и параметрический синтез регуляторов системы управления технологическим процессом
Разработка алгоритмов работы регуляторов системы управления технологическим оборудованием
Навигация
Функциональная структура системы управления ТП. Описание функциональных блоков системы
Автоматическая система управления процессом испытаний электропривода лифтов
63311
знаков
3
таблицы
31
изображение
2.2 Функциональная структура системы управления ТП. Описание функциональных блоков системы
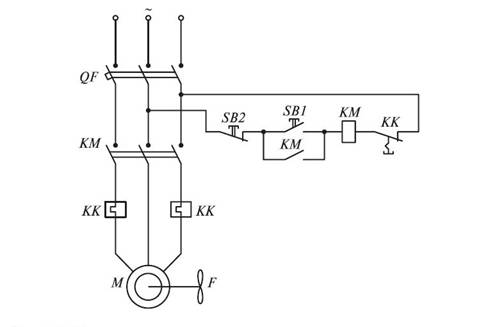
Для управления АД нагрузочного моментного ЭП был выбран преобразователь частоты фирмы «Danfoss», Дания серии VLT 3060 на базе автономного инвертора напряжения с промежуточным звеном постоянного тока, рисунок 13.
Управление инвертором осуществляется от цифрового сигнального микропроцессора TMS320F2812 компании Texas Instruments из специализированной серии C2000, предназначенной для управления ЭП подъёмных механизмов. Кроме управления инвертором на микропроцессор возложены функции стабилизации напряжения в звене постоянного тока и организация защитных процедур, осуществляемых с помощью датчиков в звене выпрямленного напряжения и датчиков тока статора АД нагрузочного ЭП.

Рисунок 14 – Функциональная схема моментного асинхронного ЭП
В режимах создания интенсивной нагрузки АД нагрузочного моментного ЭП переходит в режим генераторного торможения, что влечёт за собой повышение напряжения в звене постоянного тока. Для стабилизации напряжения используется тормозное сопротивление Rт, временно подключаемое к звену постоянного тока с помощью силового транзистора VT7. Управление ключом VT7 осуществляется от микропроцессора в режиме ШИМ.
На рисунке 14 представлена аппаратная реализация моментного асинхронного ЭП для создания усилий, имитирующих работу подъемных механизмов. Необходимый набор защитных функций, система векторного управления и формирователь моментных усилий реализованы программно на базе ресурсов микропроцессора.
Среда программирования Code Composer Studio 3.1 и аппаратные
средства для отладки микропроцессора TMS320F2812 позволяют выполнить программную реализацию системы управления и дают возможность получить графики работы в режиме реального времени.
2.3 Определение уровней управления ТП и архитектуры верхнего уровня АСУ
По функциональному назначению управление технологическим процессом испытаний электропривода лифтов разделяется на три уровня:
1. Верхний уровень – автоматизированное рабочее место оператора на базе промышленного компьютера (ПК). На этом уровне происходит визуализация переменных состояния технологического процесса, выбор алгоритма управления.
2. Средний уровень – реализация обработки информации от измерительной системы нижнего уровня и формирование управляющего сигнала для исполнительного привода (в том числе исполнительных элементов автоматики) согласно выбранному алгоритму управления. Для реализации перечисленных функций был выбран Модуль TE- TMS320F28335 на базе микроконтроллера Delfino от Texas Instruments.
Модуль включает микроконтроллер TMS320F28335, мост USB-UART, интерфейсы RS-485 и CAN, внешнюю SPI флэш-память, отладочный разъем JTAG. Отличительными особенностями микроконтроллера TMS320F28335 являются: ядро C28x+FPU с тактовой частотой 150 МГц и сопроцессором арифметики с плавающей точкой, 512 Кбайт флэш-памяти программ, 68 Кбайт RAM-памяти, 12-разрядный АЦП (16 каналов), 3х UART, SPI, I2C, 2х CAN, блок ШИМ.
Многофункциональная плата ввода-вывода фирмы Fastwel PC104 используется для сбора и обработки информации с первичных датчиков и дальнейшей передачи информации в микроконтроллер.
3. Нижний уровень – исполнительный электропривод, который входит в технологическое оборудование. На этом уровне происходит обработка управляющего сигнала и формирование заданных переменных технологического процесса. Уровень включает в себя преобразователь частоты фирмы «Danfoss», Дания серии VLT 3060 на базе автономного инвертора напряжения с промежуточным звеном постоянного тока; датчики измерения частоты вращения и положения вала испытуемого и нагрузочного двигателя, датчики – инкрементные датчики положения (энкодеры); датчики тока; тензометрический датчик момента; нагрузочный двигатель АИМ А-100LA.
На верхнем уровне система управления вырабатывает технологическое задание на движение рабочих органов отдельной технической установки или целой технологической системы.
Средний уровень обеспечивает программное движение исполнительных приводов, движение по заданной траектории в пространстве управляемых переменных.
На нижнем уровне определяется технологическое оборудование, непосредственно участвующее в технологическом процессе, пространство управляемых и регулируемых переменных технологического оборудования.
2.4 Блок схемы аппаратных средств уровней системы. Выбор аппаратных средств на всех уровнях управления. Вариант принципиальной схемы соединения между аппаратными блоками системы
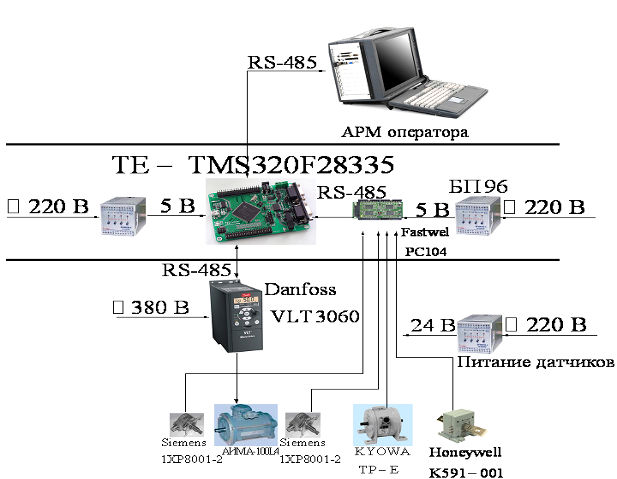
Рисунок 15 – Блок-схема соединения аппаратных средств уровней управления АСУ ТП
2.5 Выбор общего и специального программного обеспечения на всех уровнях АСУ ТП
Для Модуля TE- TMS320F28335 на базе микроконтроллера Delfino от Texas Instruments используется следующее программное обеспечение:
Драйвер под Windows XP/2000/NT.
Утилита для конфигурирования параметров микроконтроллера с возможностью тестирования периферии.
DLL библиотека с поддержкой набора функций управления микроконтроллером.
Примеры программирования микроконтроллера на Borland Delphi, C++ Builder.
Преобразователь частоты реализует векторное управление двигателем, программа работы написана в среде Code Composer Studio v3.1.
В качестве программного обеспечения нижнего уровня используется ПО преобразователя частоты Danfoss VLT 3060. Основное ПО содержит широкий диапазон стандартных функций. Эти функции обеспечивают удобство и гибкость при использовании и настройке преобразователя (выбор задания и т. п.). Они также обеспечивают универсальность управления и высокую степень безопасности при работе (автоматизированный пуск, пуск на ходу, генератор импульсов, и др.).
Управление работой измерительной системы осуществляется с применением прикладного программного обеспечения, разработанного в среде LabVIEW и Visual C++. Пакет LabVIEW предназначен для работы с измерительными приборами, платами АЦП/ЦАП; в нем имеются встроенные функции анализа данных. Программы разрабатываются в виде блок-схем (диаграмм) процесса или задачи в графической среде программирования.
2.6 Принципы обмена информацией между уровнями системы. Выбор интерфейсных устройств и протоколов обмена
Обмен информацией между верхним (АРМ оператора) и средним уровнем осуществляется по интерфейсу RS-485. Данный интерфейс позволяет эффективно и быстро обмениваться данными между верхним и средним уровнями, между приборами автоматики (PLC/PC или системы управления процессами) и распределенными устройствами нижнего уровня (преобразователи, датчики).
Применяемый интерфейс RS-485 позволяет устройствам обмениваться данными без загрузки процессора контроллера.
Похожие работы

... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
... большей стабильности платформы может быть установлено два варианта стабилизатора: система блокировки подвески и опускающийся на землю позади машины стабилизатор. По сравнения с обычными 120-мм минометными системами, «SRAMS» обладает рядом характеристик, позволяющих увеличить ее скорострельность. В том числе установлена полуавтоматическая система подачи снарядов и запатентованный клапан зарядного ...
... . Большой вклад в развитие таких электроприводов вносят коллективы институтов Тяжпромэлектропроект, Укртяжпромэлектропроект и др. 2 Теории и практики автоматизированного электропривода Электрический привод обеспечивает все отрасли народного хозяйства механической энергией, полученной из электрической, осуществляет практически все технологические операции, связанные с механическим движением, во ...

... навыки у докеров. 23. СИСТЕМА ОБЕСПЕЧЕНИЯ ПЕРЕГРУЗОЧНЫХ РАБОТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКОЙ Система обеспечения оснасткой технологических процессов портовых перегрузочных работ включает: планирование поставки и производство механизмов и приспособлений; содержание их в исправном состоянии, т. е. регистрацию, освидетельствование с испытанием, периодические осмотры, техническое обслуживание и ...
0 комментариев