Навигация
Керуючі автомати з “твердою” логікою
50010
знаков
6
таблиц
0
изображений
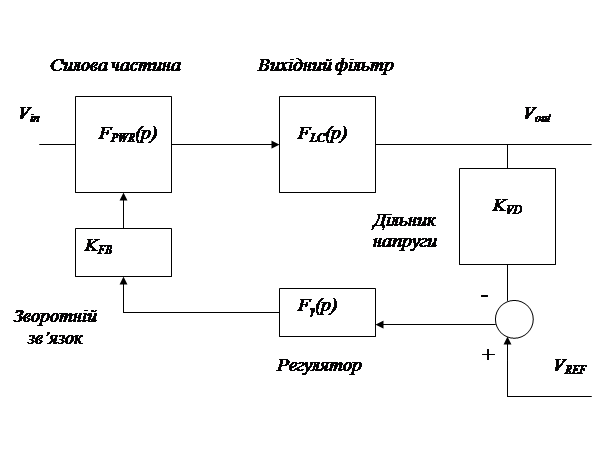
2.5 Керуючі автомати з “твердою” логікою
Керуючі
автомати з
“твердою”
логікою являють
собою логічні
схеми,
які
виробляють
розподілені
по часу керуючі
функціональні
сигнали. На
відміну від
керуючих пристроїв
з збереженою
у пам’яті логікою
в цих автоматах
можна змінити
логіку роботи
тільки шляхом
перероблення
схем автомата.
В склад
схеми входять
регістр кода
операції, який
є частиною
регістра команд,
лічильник
тактів, дешифратор
тактів і дешифратор
кода операції,
а
також логічні
схеми утворення
керуючих
функціональних
сигналів.
На лічильник
тактів поступають
сигнали від
блока синхросигналів,
і
лічильник з
кожним сигналом
міняє свій
стан. Стан лічильника
представляють
номера тактів,
які міняються
від 1 до n. Дешифратор
тактів формує
на j-му виході
одиничний
сигнал при i-му
стані лічильника
тактів, тобто
під час i-го такта.
Дешифратор
кода операції
виробляє одиничний
сигнал на j-му
виході,
якщо
виконується
j-та команда.
Логічні схеми утворення керуючих функціональних сигналів для кожної команди збуджують формувачі функціональних сигналів для виконання потрібних в даному такті мікрооперацій.
Недоліком
розглянутих
схем є одинакове
число тактів
для всіх команд.
Це
потребує вирівнювання
числа тактів
виконання
команд по найбільш
“довгій” команді,
що призведе
до затрати
часу.
Автомат
Мілі, побудований
на мікропрограмі,
має число станів,
як правило,
менше, ніж число
станів еквівалентного
йому автомата
Мура. З цієї
точки зору
використання
автомата Мілі
є кращим. Але
використання
автомата Мілі
в якості керуючого
автомата не
завжди можливо.
Це пояснюється
тим,
що
керуючий автомат
працює в контурі
з операційним
блоком. В автомата
Мілі перехід
в новий стан
здійснюється
одночасно з
формуванням
вихідного
сигнала. Тому,
якщо операційний
блок виробляє
освідомлюючі
сигнали зразу
ж при виникненні
керуючих сигналів,
а керуючий
автомат є автоматом
Мілі, можлива
наступна недопустима
ситуація: автомат
Мілі ще не змінив
стан, а на його
входи прийшли
нові значення
освідомлюючих
сигналів, які
потребують
виконання
іншого переходу.
Для виключення можливих збоїв в роботі керуючих автоматів ставляться спеціальні схеми затримки або,що є таким самим, один з двох автоматів (керуючий або операційний) виконують в вигляді автомата Мура, який видає вихідний сигнал після зміни стану (перехода).
2.6 Системи логічних елементів (Каган стр. 73)
Основні параметри систем логічних елементів:
Питома напруга і сигнали. Системи елементів характеризуються кількістю напруги, що використовуються, і її номінального значення.
Для логічних
елементів
вказується
полярність
і рівень вхідного
та
вихідного
сигналу.
Коефіцієнт з’єднання по входу. Визначає максимально можливе число входів логічних елементів. Збільшення числа входів пов’язане з ускладення схеми елементів і призводить до погіршення інших параметрів.
Коефіцієнт розгалуження по виходу. Показує, на скільки логічних входів може бути одночасно навантажений вихід даного логічного елементу.
Завадостійкість. Завадою називають небажану електричну дію (пульсація напруги живлення, дія паразитних ємностей) на логічний елемент, яка може призвести до спотворення даних. Завадостійкість – це здатність елемента правильно функціонувати при наявності завад; визначається максимально допустимою напругою завади, при якому не настає збій у його роботі.
Швидкодія.
Характеризується
середнім часом
затримки
розповсюдження
сигналу: ,
де tз1 і tз2 –
затримка вихідного
сигналу відносно
фронту
і
спаду вхідного.
2.7 Двійково-десятковий
перетворювач
(Чу
стр. 75 - 80)
Алгоритм двійково-десяткового перетворювача базується на способі ручного перетворення. Він перетворює 10-бітні цілі двійкові числа в десяткові, причому кожен десятковий розряд кодується десятковим числом. Використовуються такі регістри:
A(4 – 1) регістр розряду 100
B(4 – 1) регістр розряду 101
C(4 – 1) регістр розряду 102
D(0 – 3) лічильник
Q(1 – 12) регістр вихідного числа
T(0 – 2) регістр управління
K(0 – 4) = T декодер
Оператор cor:
X cor X(4 – 1),
IF (X = 5, 6, 7, 8, 9) THEN (X X add 3).
Перетворення відбувається в касрегістрі C – B – A.
A 0
B 0
C 0
D 10
FINI OFF
A cor A
B cor B
C cor C
C – B – A – Q shl C – B – A – Q
D countdn D
D = 0
FINI ON
На першому
кроці касрегістр
встановлюється
в 0. Потім вміст
касрегістру
C – B – A – Q зсуваєтсья
на один біт
вліво, і тоді
в регістр A попадає
старший біт
числа, що перетворюється.
На кроці 3 перевіряєтсья
чи потрібна
корекція вмісту
регістрів A, B,
C, тобто чи не
містить хоча
б один з них
числа,
що
більше, ніж 4.
Описані мікрооперації
зсуву вліво
і умовної корекції
повторюються
до тих пір, поки
останній біт регістру Q не
попаде в регістр
A.
A 0, B 0, C 0, D 0, FINI OFF, T 0
C – B – A – Q Shl C – B – A – Q, T 1
D countdn D, T 2
IF (D = 0) THEN (T 4) ELSE (T 3),
A cor A, B cor B, C cor C, T 0
FINI ON
Перетворення з десяткової системи у двійкову є складнішим. Тому ми не будемо його використовувати.
2.8 Структура
і мікропрограми
АЛП
для ділення
чисел з фіксованою
крапкою.
(Каган
ст. 211, 213-219)
Ділення в ЕОМ звичайно зводиться до виконання послідовності віднімання дільника спочатку з діленого, а потім з утворюючихся в процесі ділення часткових залишків і зсуву часткових залишків.
Реалізувати ділення можна двома основними способами.
Похожие работы
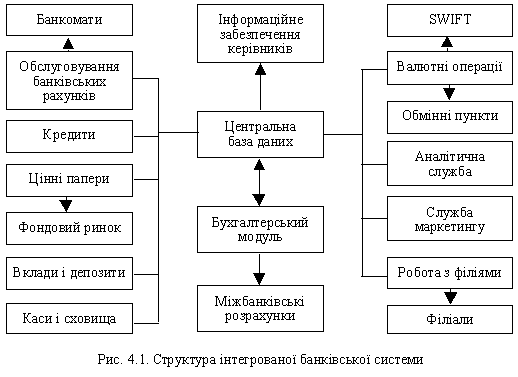
... В АБС АКБ «ПРОМІНВЕСТБАНК» ТА ОЦІНКА РІВНЯ ВРАЗЛИВОСТІ БАНКІВСЬКОЇ ІНФОРМАЦІЇ 3.1 Постановка алгоритму задачі формування та опис елементів матриці контролю комплексної системи захисту інформації (КСЗІ) інформаційних об’єктів комерційного банку В дипломному дослідженні матриця контролю стану побудови та експлуатації комплексної системи захисту інформації в комерційному банку представлена у вигляді ...
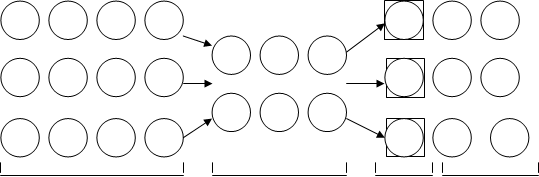
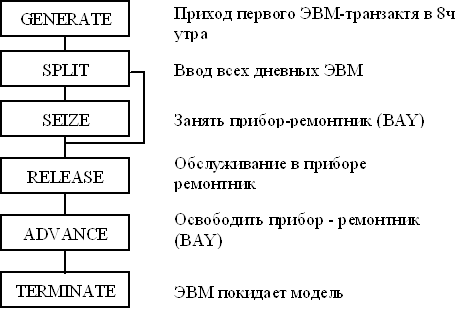
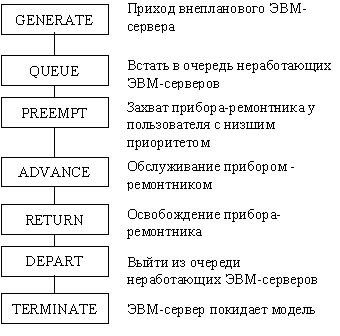
... , визначення основних характеристик одноканальних систем масового обслуговування вимагає великої обчислювальної роботи, в зв’язку з чим всі розрахунки робляться на комп’ютері. 1.2 Побудова моделей задач масового обслуговування (на прикладі роботи обчислювального центру (ОЦ)) 1.2.1 Модель для імітації виробничої діяльності ОЦ 1.2.1.1 Завдання Розробити модель для імітації виробничої ді ...

... рішень, зв’язаних із регулюванням витрат і з питань інвестиційної діяльності підприємства. Отже, управлінський облік це формування інформації для управління витратами з метою підвищення ефективності функціонування підприємства. Причому, відповідно до Закону «Про бухгалтерський облік і фінансову звітність в Україні», підприємства вправі самостійно обирати систему і форми ведення управлінського ...

... і вказівки до дипломного проектування для студентів спеціальності “Радіотехніка” /Укл. В.О.Дмитрук, В.В.Лисак, С.М.Савченко, В.І.Правда. – К.: КПІ, 1993. – 20 с. 8. Костиков В.Г., Парфенов Е.М., Шахнов В.А. Источники электропитания электронных средств. Схемотехника и конструирование: Учебник для вузов. – 2-е изд. – М.: Горячая линия – Телеком, 2001. – 344 с.: ил. 9. Перельман Б.Л. ...
0 комментариев