Навигация
5. ДАЛЬНОМЕР
В дальномере РЛГС 5Г11 применена электрическая схема измерения дальности с двумя интеграторами. Данная схема позволяет получить большую скорость захвата и сопровождения цели, а также выдавать дальность до цели и скорость сближения в виде постоянного напряжения. Система с двумя интеграторами осуществляет запоминание последней скорости сближения при кратковременном пропадании цели.
Работа дальномера может быть описана следующим образом. Во временном дискриминаторе (ВД) временная задержка импульса, отраженного от цели, сравнивается с временной задержкой импульсов сопровождения ("Ворот"), создаваемой электрическим временным модулятором (ВM),в который входит схема линейной задержки. Схема автоматически обеспечивает равенство между задержкой ворот и задержкой импульса цели. Так как задержка импульса цели пропорциональна расстоянию до цели, а задержка ворот пропорциональна напряжению на выводе второго интегратора, то в случае линейной зависимости между задержкой ворот и этим напряжением, последнее будет пропорционально расстоянию до цели.
Временной модулятор (ВМ), кроме импульсов "ворот", Формирует импульс ограничения времени приема и импульс селекции дальности, причем, в зависимости от того находится ли РЛГС в режиме поиска или захвата цели меняется его длительность. В режиме "поиск" Т = 100мкс, а в режиме "захват" Т = 1,5мкс.
6. СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ
В соответствии с задачами, выполняемыми СУА, последняя может быть условно разбита на три отдельные системы, каждая из которых выполняет вполне определенную функциональную задачу.
1. Система управления головкой антенны. В нее входит:
· узел УГА
· схема запоминания по каналу "ξ" в узле ЗП
· привод - электродвигатель типа СД-10а, управляемый посредством электромашинного усилителя типа УДМ-3А.
2. Система поиска и гиростабилизации. В нее входят:
· узел ПГС
· выходные каскады узлов УС
· схема запоминания по каналу "φ" в узле ЗП
· привод на электромагнитных поршневых муфтах с датчиком угловых скоростей (ДУСос) в цепи обратной связи и узла ЗП.
3. Система углового сопровождения цели. В нее входят:
· узлы: УС φ, УС ξ, A3
· схема выделения сигнала ошибки в узле СО синхронизатора
· привод на электромагнитных порошковых муфтах с ДУСом в обратной связи и узла ЗП.
Рассмотрение работы СУА целесообразно провести последовательно, в порядке выполнения ракетой следующих эволюций:
1. "взлет",
2. "наведение" по командам с земли
3. "поиск цели"
4. "предварительный захват"
5. "окончательный захват"
6. "автоматическое сопровождение захваченной цели"
С помощью специальной кинематической схемы блока обеспечивается необходимый закон движения зеркала антенны, а следовательно и перемещение характеристик направленности по азимуту (ось φ) и наклону (ocь ξ) (puc.8.4).
Траектория движения зеркала антенны зависит от режима работы системы. В режиме "сопровождение" зеркало может совершать только простые движения по оси φ - на угол 30°, и по оси ξ - на угол 20°. При работе в режиме "поиск", зеркало совершает синусоидальное колебание относительно оси φн (от привода оси φ) с частотой 0.5 Гц и амплитудой ± 4°, и синусоидальное колебание относительно оси ξ (от профиля кулачка) с частотой f = 3 Гц и амплитудой ± 4°.
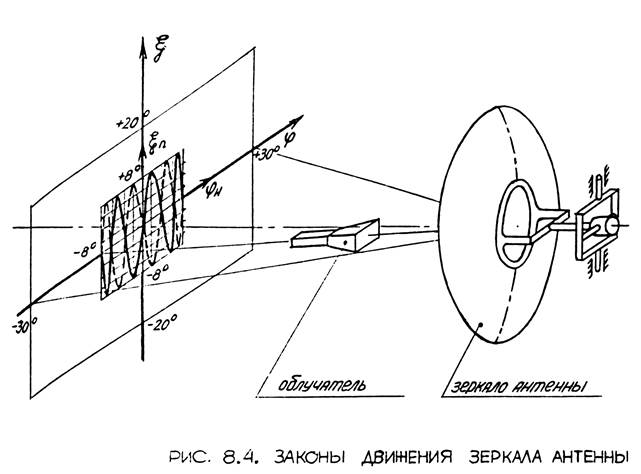
Таким образом обеспечивается просмотр зоны 16"х16" т.к. угол отклонения характеристики направленности в 2 раза больше угла поворота зеркала антенны.
Кроме того, просматриваемая зона перемещается по осям (приводами соответствующих осей) командами с земли.
7. РЕЖИМ "ВЗЛЕТ"
При взлете ракеты зеркало антенны РЛГС должно находиться в нулевом положении "слева-вверху", что обеспечивается системой ПГС (по оси φ и по оси ξ).
8. РЕЖИМ "НАВЕДЕНИЕ"
В режиме наведения положение луча антенны (ξ =0 и φ =0) в пространстве задается с помощью управляющих напряжений, которые снимаются с потенциометров и узла гиростабилизации зоны поиска (ГС) и заводится соответственно в каналы узла ПГС.
После вывода ракеты в горизонтальный полет, в РЛГС через бортовую станцию подачи команд (СПК) подается разовая команда "наведение". По этой команде узел ПГС удерживает луч антенны в горизонтальном положении, разворачивая его по азимуту в направлении, задаваемом командами с земли "доворот зоны по "φ".
Система УГА в этом режиме удерживает голову антенны в нулевом положении относительно оси "ξ".
9. РЕЖИМ "ПОИСК".
При сближении ракеты с целью до расстояния примерно равного 20-40 км, через СПК на станцию подается разовая команда "поиск". Эта команда поступает в узел (УГА), при этом происходит переключение узла в режим скоростной следящей системы. В этом режиме на вход усилителя переменного тока (УС) узла (УГА) поступает сумма фиксированного сигнала частоты 400 Гц (36В) и напряжение скоростной обратной связи с токогенератора ТГ-5А. При этом вал исполнительного двигателя СД-10А начинает вращаться с фиксированными оборотами, и через кулачковый механизм заставляет качаться зеркало антенны относительно штока (т.е. относительно оси "ξ") с частотой 3 Гц и амплитудой ± 4°. Одновременно двигатель вращает синусный потенциометр - датчик (СПД), выдающий напряжение "заводка" с частотой 0,5 Гц на азимутальный канал системы ПГС. Это напряжение подается на суммирующий усилитель (УС) узла (КС φ) и далее на привод антенны по оси. В результате этого зеркало антенны начинает совершать колебания по азимуту с частотой 0,5 Гц и амплитудой ± 4°.

Синхронное качание зеркала антенны системами УГА и ПГС, соответственно по углу места и азимуту, создает поисковое движение луча, показанное на рис. 3.4.
В режиме "поиск" выходы фазовых детекторов узлов (УС - φ и УС - ξ) контактами обесточенного реле (РПЗ) отключены от входа суммирующих усилителей (СУ).
В режиме "поиск" на вход узла (ЗП) по каналу "φ" поступает напряжение отработки "φн" и напряжение с гироазимута "φг", по каналу "ξ" - напряжение обработки "ξп".
10. РЕЖИМ "ПОДГОТОВКА ЗАХВАТА".
Для уменьшения времени обзора поиск цели в РЛГС осуществляется с большой скоростью. В связи с этим в станции применяется двухступенчатая система захвата цели, с запоминанием положения цели при первом обнаружении, с последующим возвратом антенны в запомненное положение и вторичным окончательным захватом цели, после которого уже следует ее автосопровождение. Как предварительный, так и окончательный захват цели осуществляете схемой узла A3.
При появлении цели в зоне поиска станции видеоимпульсы "прямой цели" со схемы защиты от несинхронных помех узла (СИ) синхронизатора начинают поступать через усилитель сигнала ошибки (УСО) узла (АЗ) на детекторы (Д-1 и Д-2) узла (A3). При достижении ракетой дальности, на которой отношение сигнал/шум оказывается достаточным для срабатывания каскада реле подготовки захвата (КРПЗ), последний вызывает срабатывание реле подготовки захвата (РПЗ) в узлах (УС φ и УС ξ). Автомат захвата (A3) при этом сработать не может, т.к. он отпирается напряжением со схемы (АПЗ), которое подается только через 0,3 сек после срабатывания (АПЗ) (0,3 сек - время, необходимое для возврата антенны в точку, где была первоначально обнаружена цель).
Одновременно со срабатывании реле (РПЗ):
· от узла запоминания(ЗП) отключаются входные сигналы "ξп" и "φн"
· со входов узлов (ПГС) и (УГА) снимаются напряжения, управляющие поиском
· узел запоминания (ЗП) начинает выдавать запомненные сигналы на входы узлов (ПГС) и (УГА).
Для компенсации ошибки схем запоминания и гиростабилизации на входы узлов (ПГС) и (УГА) одновременно с запомненными напряжениями с узла (ЗП) подается напряжение качания (f = 1,5 Гц), вследствие чего, при возвращении антенны в запомненную точку происходит качание луча с частотой 1,5 Гц и амплитудой ± 3° .
В результате срабатывания реле (РПЗ) в каналах узлов (УС ) и (УС ) на вход приводов антенны по каналам "φ" и "ξ" одновременно с сигналами с ПГС подключаются выходы узлов (УС), в результате чего приводы начинают управляться также и сигналом ошибки системы углового сопровождения. Благодаря этому при повторном попадании цели в диаграмму направленности антенны система сопровождения втягивает антенну в равносигнальную зону, облегчая возврат в запомненной точку, повышая, таким образом, надежность захвата.
11. РЕЖИМ "ЗАХВАТА"
По истечении 0,4 сек после срабатывания реле подготовки захвата, снимается блокировка. В результате этого, при повторном попадании цели в диаграмму направленности антенны происходит срабатывание каскада реле захвата (КРЗ), который вызывает:
· срабатывание реле захвата (РЗ) в узлах (УС "φ" и УС "ξ") отключающих сигналы, поступающие с узла (ПГС). Система управления антенной переходит в режим автоматического сопровождения цели
· срабатывание реле (РЗ) в узле УГА. В последнем происходит отключение сигнала, поступающего с узла (ЗП) и подключение потенциала "земли". Под воздействием появившегося сигнала система УГА возвращает зеркало антенны в нулевое положение по оси "ξп". Возникающий при этом, вследствие увода равносигнальной зоны антенны с цели, сигнал ошибки отрабатывается системой СУД, по основным приводам "φ" и "ξ". Во избежание срыва сопровождения, возврат антенны к нулю по оси "ξп" производится с пониженной скоростью. При достижении зеркалом антенны нулевого положения по оси "ξп". срабатывает система фиксации зеркала.
12. РЕЖИМ "АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ ЦЕЛИ"
С выхода узла СО со схем видеоусилителей (ВУЗ и ВУ4) разделенный по осям "φ" и "ξ" сигнал ошибки частотой 62,5 Гц поступает через узлы УС "φ" и УС "ξ" на фазовые детекторы. На фазовые детекторы также заводится опорное напряжение "φ" и "ξ" , поступающее со схемы триггера опорных напряжений (ТОН "φ") узла КП-2 и схемы формирования импульсов коммутации (СΦИКМ "П") узла УФ-2. С фазовых детекторов сигналы ошибки поступают на усилители (СУ "φ" и СУ "ξ") и далее на приводы антенны. Под воздействием поступившего сигнала привод поворачивает зеркало антенны в сторону уменьшения сигнала ошибки, осуществляя тем самым слежение за целью.
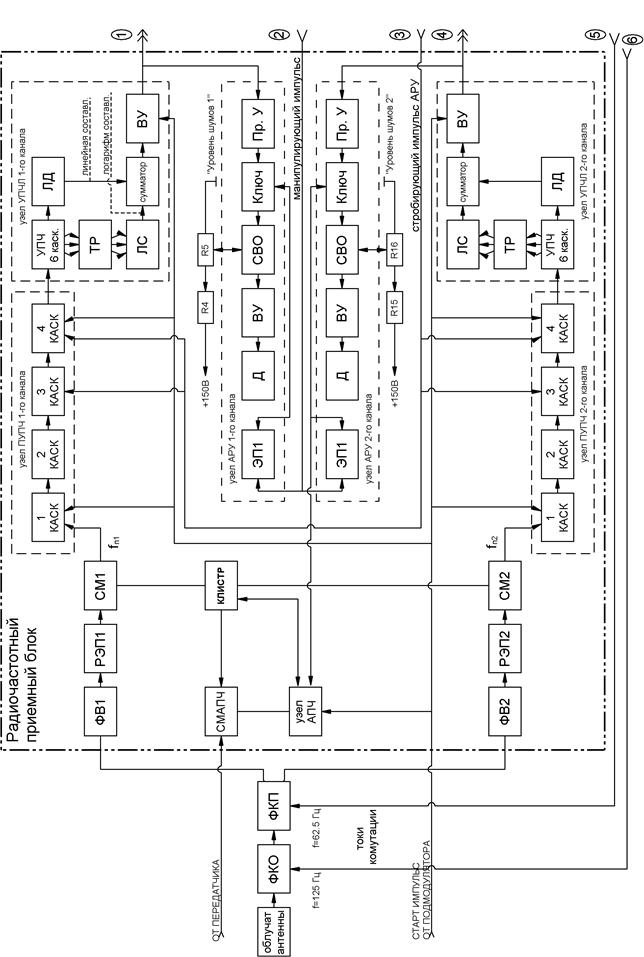
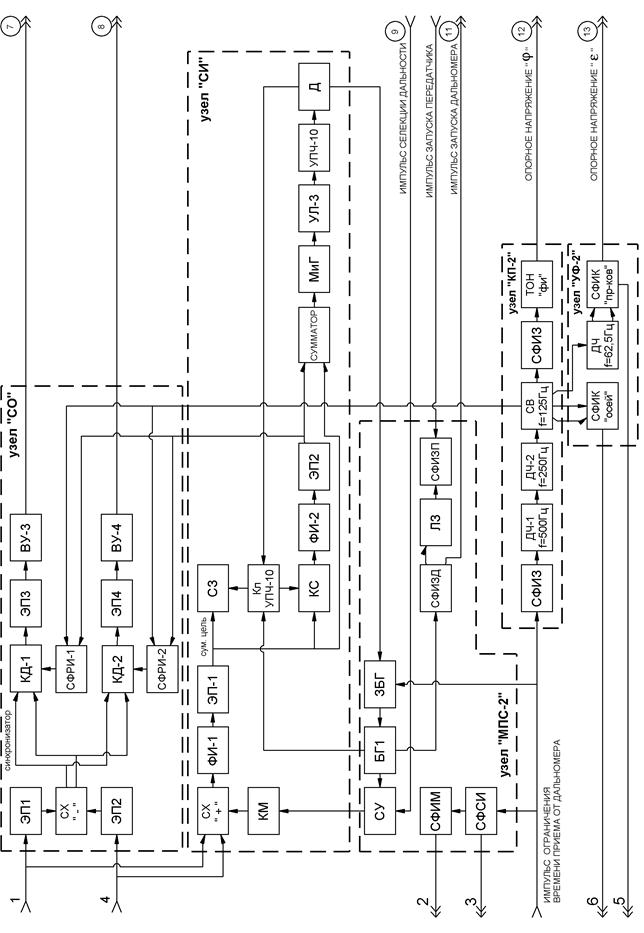
[1] Рисунок расположен в конце всего текста. Схема разбита на три части. Переходы выводов из одной части в другую, обозначены цифрами.
Похожие работы
... информации и адаптация систем распознавания к условиям ее работы. 2. Анализ априорного словаря признаков распознавания противорадиолокационных ракет и их носителей Одним из основных путей повышения эффективности радиолокационного распознавания является повышение информативности радиолокационных систем с целью получения такого признака распознавания, который бы отражал определенные свойства ...
... техническому совершенству, боевым и эксплуатационным качествам не уступали лучшим зарубежным образцам, а нередко и превосходили их. Большинство из созданных в эти годы образцов в большей или меньшей степени представляли собой высокоточное оружие. В них использовались высокоточные инерциальные системы, системы коррекции и телеуправления движением на траектории и системы самонаведения на конечном ...
... требуется для дальнейших расчетов, в частности, расчета необходимой мощности передатчика помех радиовзрывателю. 3. Расчёт параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех) Аппаратура постановки помех для преждевременного срабатывания радиовзрывателя, как правило, устанавливается на вероятный объект атаки, в данном случае, истребитель- ...
... противокорабельных ракет. На Совете Обороны в 1969г. Главнокомандующий ВМФ С.Г.Горшков оценил создание противокорабельных комплексов с крылатыми ракетами как наше национальное достижение. Совершенствование комплексов с противокорабельными ракетами Первые крылатые ракеты, разработанные НПО “Машиностроение”, при всех своих достоинствах могли стартовать только из надводного положения ПЛ, что ...
0 комментариев