Навигация
0 U’ 0 U’
а) б)
Рис.13. Примеры годографов Михайлова для различных характеристических уравнений замкнутых систем:а - устойчивые системы при n = 1 - 6 ; б - неустойчивые системы при n = 4 и различных параметрах
Соответствующие устойчивым системам годографы Михайлова для уравнений различных порядков построены на рис. 13,а. На рис. 13,б построены годографы Михайлова для неустойчивых систем при n = 4.
Введение
Одной из основных задач теории автоматического регулирования является изучение динамических процессов, происходящих в автоматических системах. Автоматические системы при нормальной эксплуатации должны поддерживать определенный режим работы объекта регулирования при действии на него многих возмущающих факторов. Такое поведение может быть достигнуто лишь в системах автоматического регулирования, обладающих устойчивостью по отношению к этим воздействиям. Устойчивость системы означает, что малое изменение входного сигнала или какого-нибудь возмущения, начальных условий или параметров не приведут к значительным отконениям выходного сигнала. Это определение раскрывает физический смысл понятия устойчивости.
Теория устойчивости, основоположниками которой являются великий русский ученый А.М. Ляпунов и великий французский ученый А.Пуанкаре, представляет собой важный раздел прикладной математики. Создателями современной теории устойчивости являются русские ученые Н.Г. Четаев, Е.А. Барбашин, Н.П. Еругин, Н.Н. Красовский.
1. Понятие устойчивости, асимптотической устойчивости и неустойчивости по Ляпунову.
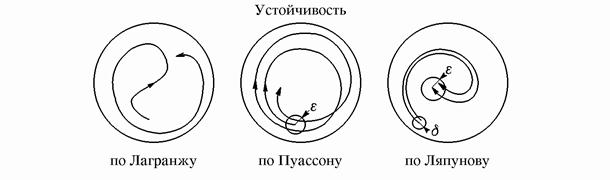
Рассмотрим задачу Коши для нормальной системы дифференциальных уравнений
![]()
![]()
![]()
x’ = f ( t , x )
(1)
![]()
![]()
с начальными условиями x ( t0 ) = x0 (2)
![]() где x = ( x1, x2,
... , xn ) - n -
мерный вектор;
t О I = [t0, + Ґ [ - независимая
переменная,
по которой
производится
дифференцирование;
где x = ( x1, x2,
... , xn ) - n -
мерный вектор;
t О I = [t0, + Ґ [ - независимая
переменная,
по которой
производится
дифференцирование;
![]()
![]()
![]()
![]()
![]()
f ( t, x ) = ( f1 ( t , x ) , f2 ( t , x ) , ... , fn ( t , x ) ) - n - мерная вектор - функция.
Комментарии к задаче Коши (1), (2). Для простоты восприятия эту задачу можно сначала трактовать как задачу Коши для скалярного дифференциального уравнения первого порядка вида x’= f ( t , x ) с начальным условием x ( t0 ) = x0. С целью упрощения все рисунки п. 10 ,если нет специальных оговорок, приводится для случая n = 1.
![]()
![]()
x
0 t
Рис.1
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Пусть
задача Коши
(1), (2) удовлетворяет
условиям теоремы
существования
и единственности.
Тогда через
каждую точку
( t0 , x0
) области
единственности
решений проходит
только одна
интегральная
кривая. Если
начальные
данные ( t0
, x0 ) изменяются,
то изменяется
и решение. Тот
факт, что решение
зависит от
начальных
данных, обозначается
следующим
образом: x ( t ) = x ( t
; t0 , x0
). Изменение
этого решения
в данной математической
модели с изменением
начальных
данных ( t0
, x0 ) приводят
к существенному
изменению
решения x ( t ; t0
, x0 ) , приводит
к тому, что такой
моделью нельзя
пользоваться,
поскольку
начальные
данные ( t0
, x0 ) получаются
из опыта, а изменения
не могут быть
абсолютно
точными. Естественно,
что в качестве
математической
модели пригодна
лишь та задача
Коши, которая
устойчива к
малым изменениям
начальных
данных.
Пусть
задача Коши
(1), (2) удовлетворяет
условиям теоремы
существования
и единственности.
Тогда через
каждую точку
( t0 , x0
) области
единственности
решений проходит
только одна
интегральная
кривая. Если
начальные
данные ( t0
, x0 ) изменяются,
то изменяется
и решение. Тот
факт, что решение
зависит от
начальных
данных, обозначается
следующим
образом: x ( t ) = x ( t
; t0 , x0
). Изменение
этого решения
в данной математической
модели с изменением
начальных
данных ( t0
, x0 ) приводят
к существенному
изменению
решения x ( t ; t0
, x0 ) , приводит
к тому, что такой
моделью нельзя
пользоваться,
поскольку
начальные
данные ( t0
, x0 ) получаются
из опыта, а изменения
не могут быть
абсолютно
точными. Естественно,
что в качестве
математической
модели пригодна
лишь та задача
Коши, которая
устойчива к
малым изменениям
начальных
данных.
![]()
![]()
![]()
![]()
![]() Определим
понятие устойчивости,
асимптотической
устойчивости
и неустойчивости
в смысле Ляпунова.
Для этого отклоение
решения x ( t ) = x ( t ; t0 , x0
) , вызванное
отклонением D x0 начального
значения x0
, будем записывать
следующим
образом:
Определим
понятие устойчивости,
асимптотической
устойчивости
и неустойчивости
в смысле Ляпунова.
Для этого отклоение
решения x ( t ) = x ( t ; t0 , x0
) , вызванное
отклонением D x0 начального
значения x0
, будем записывать
следующим
образом:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() |
x ( t ; t0 , x0
+ D x0 ) - x ( t ) | = | x ( t ; t0 ,
x0 + D x0 ) - x ( t ; t0
, x0 ) |.
|
x ( t ; t0 , x0
+ D x0 ) - x ( t ) | = | x ( t ; t0 ,
x0 + D x0 ) - x ( t ; t0
, x0 ) |.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Определение
1. Решение x ( t ) = x ( t ; t0
, x0 ) системы
(1) называется
устойчивым
по Ляпунову
в положительном
направлении
(или устойчивым),
если оно непрерывно
по x0 на интервале I = = [ t0,
+ Ґ [ , т.е. " e > 0 $ d > 0 такое, что
" D x0
Определение
1. Решение x ( t ) = x ( t ; t0
, x0 ) системы
(1) называется
устойчивым
по Ляпунову
в положительном
направлении
(или устойчивым),
если оно непрерывно
по x0 на интервале I = = [ t0,
+ Ґ [ , т.е. " e > 0 $ d > 0 такое, что
" D x0
![]() | D x0 | Ј d Ю | x ( t ; t0 ,
x0 + D x0 ) - x ( t ) | Ј e " t і t0.
| D x0 | Ј d Ю | x ( t ; t0 ,
x0 + D x0 ) - x ( t ) | Ј e " t і t0.
Если, кроме того, отклонение решения x ( t ) стремится к нулю при t ® + Ґ для достаточно малых D x0 , т.е. $ D > 0 " D x0.
![]()
![]()
![]()
![]()
![]()
![]() | D x0 | Ј D Ю | x ( t ; t0 ,
x0 + D x0 ) - x ( t ) | ® 0 , t ® + Ґ . (3)
| D x0 | Ј D Ю | x ( t ; t0 ,
x0 + D x0 ) - x ( t ) | ® 0 , t ® + Ґ . (3)
![]() то
решение x ( t ) системы
(1) называется
асимптотически
устойчивым
в положительном
направлении
(или асимптотически
устойчивым).
то
решение x ( t ) системы
(1) называется
асимптотически
устойчивым
в положительном
направлении
(или асимптотически
устойчивым).
Аналогично определяются различные типы устойчивости решения в отрицательном направлении.
![]()
![]()
![]()
![]()
![]() Комментарий
к определению 1. 1) Геометрически
устойчивость
по Ляпунову
решение х ( t )
можно интерпритировать
следующим
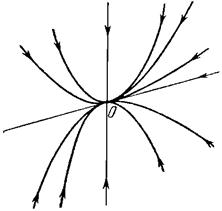
образом ( рис.1
) : все решения
x ( t ; t0 , x0
+ D x0 ) , близкие
в начальный
момент t0
к решению x ( t ) (т.е. начинающиеся
в пределах d - трубки ) , не
выходят за
пределы e - трубки при
всех значениях
t і t0 .
Комментарий
к определению 1. 1) Геометрически
устойчивость
по Ляпунову
решение х ( t )
можно интерпритировать
следующим
образом ( рис.1
) : все решения
x ( t ; t0 , x0
+ D x0 ) , близкие
в начальный
момент t0
к решению x ( t ) (т.е. начинающиеся
в пределах d - трубки ) , не
выходят за
пределы e - трубки при
всех значениях
t і t0 .
![]()
![]()
x
0 t
Рис.2
![]()
![]()
![]() Определение
2. Решение
x ( t ) = x ( t ; t0
, x0 ) системы
(1) называется
неустойчивып
по Ляпунову
в положительном
направлении
(или неустойчивым),
если оно не
является устойчивым
в положительном
направлении.
Определение
2. Решение
x ( t ) = x ( t ; t0
, x0 ) системы
(1) называется
неустойчивып
по Ляпунову
в положительном
направлении
(или неустойчивым),
если оно не
является устойчивым
в положительном
направлении.
Аналогично определяется неустойчивость в отрицательном направлении.
![]() Комментарий
к определению
2. Геометрически
неустойчивость
по Ляпунову
означает, что
среди решений,
близких в начальный
момент t0
к решению х ( t
) , найдется хотя
бы одно, которое
в некоторый
момент t1
( свой для каждого
такого решения)
выйдет за пределы e - трубки (рис.3).
Комментарий
к определению
2. Геометрически
неустойчивость
по Ляпунову
означает, что
среди решений,
близких в начальный
момент t0
к решению х ( t
) , найдется хотя
бы одно, которое
в некоторый
момент t1
( свой для каждого
такого решения)
выйдет за пределы e - трубки (рис.3).
Приведем примеры из механики, иллюстрирующие определения различных типов устойчивости для одномерного случая, т.е. n = 1.
Рассмотрим маятник, состоящий из точечной массы m, укрепленной на невесомом стержне длиной l (рис.4). Выведем маятник из состояния I, отклонив стержень на угол a ; тогда, как известно из опыта, он будет стремиться занять вновь положение I. Если пренебречь сопротивлением окружающей среды, то маятник будет колебаться возле положения I сколь угодно долго с амплитудой, равной начальному отклонению, - это модель устойчивого положения равновесия. Если же учитывать сопротивление окружающей среды, то амплитуда колебаний маятника будет уменьшаться и в итоге он снова займет положение I - это модель асимптотически устойчивого положения равновесия. Если маятник находится в положении II, то малейшее его смещение приведет к удалению маятника от состояния II - это модель не устойчивого положения равновесия.
![]()
![]()
x
0 t
Рис.3 Рис.4
![]()
![]()
![]()
![]()
![]()
![]() Исследование
устойчивости
произвольного
решения x ( t ) системы
(1) всегда можно
свести к исследованию
устойчивости
нулевого решения
некоторой
преобразованной
системы.
Действительно,
в системе (1)
произведем
подстановку
y ( t ) = x - x (t). Тогда получим
систему
Исследование
устойчивости
произвольного
решения x ( t ) системы
(1) всегда можно
свести к исследованию
устойчивости
нулевого решения
некоторой
преобразованной
системы.
Действительно,
в системе (1)
произведем
подстановку
y ( t ) = x - x (t). Тогда получим
систему
![]() y’ = F ( t,
y ). (4)
y’ = F ( t,
y ). (4)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() где F ( t , y ) = f ( t , y ( t ) + x ( t ) ) - f ( t , x ( t ) ) , F
(t, 0) є 0 " t і t0.
где F ( t , y ) = f ( t , y ( t ) + x ( t ) ) - f ( t , x ( t ) ) , F
(t, 0) є 0 " t і t0.
![]()
![]()
![]() Решению
x ( t ) системы (1)
соответствует
нулевое решение
y (t) є 0 системы (4).
Решению
x ( t ) системы (1)
соответствует
нулевое решение
y (t) є 0 системы (4).
![]()
![]()
![]()
![]()
![]() В
дальнейшем
будем предполагать,
что система
(1) имеет нулевое
решение, т.е.
f ( t , 0 ) = 0 " t і t0, и
ограгничимся
исследованием
устойчивости
нулевого решения.
Переформулируем
определения
различных типов
устойчивости
для нулевого
решения x ( t ) є 0 системы (1).
В
дальнейшем
будем предполагать,
что система
(1) имеет нулевое
решение, т.е.
f ( t , 0 ) = 0 " t і t0, и
ограгничимся
исследованием
устойчивости
нулевого решения.
Переформулируем
определения
различных типов
устойчивости
для нулевого
решения x ( t ) є 0 системы (1).
![]()
![]() Определение
3. Нулевое
решение x ( t ) є 0 системы (1) называется
устойчивым
по Ляпунову
в положительном
направлении
(или устойчивым),
если " e > 0 $ d = d ( e ) > 0 такое, что " x0
Определение
3. Нулевое
решение x ( t ) є 0 системы (1) называется
устойчивым
по Ляпунову
в положительном
направлении
(или устойчивым),
если " e > 0 $ d = d ( e ) > 0 такое, что " x0
| D x0 | Ј d Ю | x ( t ; t0 , x0 ) | Ј e " t і t0.
Если кроме того,
![]()
![]()
![]()
![]()
![]() $ D > 0 " x0 | D x0 | Ј D Ю | x ( t ; t0 ,
x0 ) | ® 0 , t ® + Ґ ,
$ D > 0 " x0 | D x0 | Ј D Ю | x ( t ; t0 ,
x0 ) | ® 0 , t ® + Ґ ,
![]()
![]() то
решение x ( t ) є 0 системы (1) называется
асимптотически
устойчивым
в положительном
направлении
( или асимптотически
устойчивым
) .
то
решение x ( t ) є 0 системы (1) называется
асимптотически
устойчивым
в положительном
направлении
( или асимптотически
устойчивым
) .
![]()
![]()
![]()
![]() Определение
4. Нулевое
решение x ( t ) є 0 системы (1) называется
неустойчивым
по Ляпунову
в положительном
направлении
(или неустойчиво),
если оно не
является устойчивым
в положительном
направлении,
т.е.
Определение
4. Нулевое
решение x ( t ) є 0 системы (1) называется
неустойчивым
по Ляпунову
в положительном
направлении
(или неустойчиво),
если оно не
является устойчивым
в положительном
направлении,
т.е.
![]()
![]() $ e > 0 $ t1 > t0 " d > 0 x0 № 0 | x0 | Ј d Ю | x ( t ; t0 ,
x0 ) | > e .
$ e > 0 $ t1 > t0 " d > 0 x0 № 0 | x0 | Ј d Ю | x ( t ; t0 ,
x0 ) | > e .
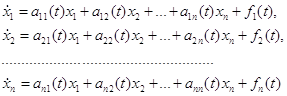
Геометрическая интерпритация устойчивости, асимптотической устойчивости и неустойчивости нулевого решения x ( t ) є 0 системы (1) дана соответственно на рис.5-7.
![]()
![]() x
x
t
0
Рис.5
![]()
![]() x
x
t
0
Рис.6
![]()
![]() x
x
t
0
Рис.7
Похожие работы

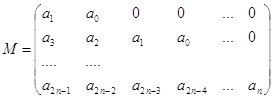
... строки. Очевидно, что такая операция не изменит знака членов следующей строки и не отразится на конечном результате. Например, элементы третьей строки таблицы (45) можно было бы разделить на 8 для упрощения последующих вычислений. Анализ результатов устойчивости в нелинейных системах. При исследовании устойчивости в цепях постоянного тока при малых возмущениях обнаружение неустойчивости ...
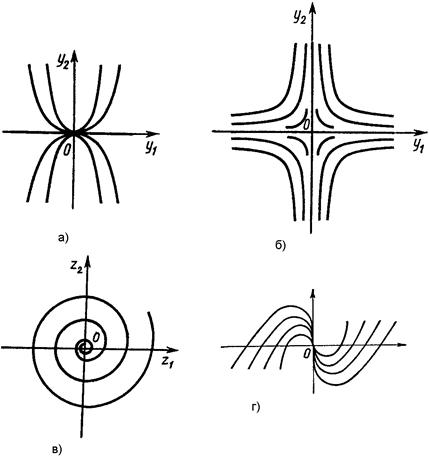
... начальным условиям . Пусть — характеристическое уравнение для определения мультипликаторов. Так как , то оно принимает вид , где . 2. Устойчивость решений систем дифференциальных уравнений. 2.1. Устойчивость по Ляпунову. Вводя определение устойчивости по Лагранжу и Пуассону в пункте 1.3, описывались свойства одной отдельно взятой траектории. Понятие устойчивости по Ляпунову характеризует ...
... владеет Украина, является одним из важнейших измерений ее миссии. То, что она призвана дать мировому сообществу будущего, с точки зрения общечеловеческого развития, становится глобальной миссией Украины. Интерпретация устойчивого развития по М. Руденко позволяет определять наиболее ценные из интеллектуальных достижений, которые должны передаваться потомкам, и формулировать требования к ним. Так, ...

... были определены для всех подставляемых в них значений аргументов. Таким образом, точка с координатами должна принадлежать множеству для всех значений на интервале . Устойчивость по Ляпунову Рассмотрим систему дифференциальных уравнений (??) Выделим некоторое решение системы (??) и назовем его невозмущенным решением. Решение назовем устойчивым в смысле Ляпунова ...
0 комментариев