Описание
технологического
процесса производства
пара
Технологическая
инструкция
по эксплуатации
паровых котлов
Требования,
предъявляемые
к системе
автоматизированного
управления
Выбор средств
полевой автоматики
(ПА)
Решение
элементарных
задач анализа
САУ
Анализ
переходных
характеристик
Построение
экспериментальных
АЧХ для канала
управления
при вариациях
его параметров
с помощью
имитационной
и частотной
моделей
Частотное
моделирование
САУ
Определение
физического
смысла функции
спектральной
плотности
Расчет
дисперсии и
спектра величины
на выходе САУ
Навигация
Расчет дисперсии и спектра величины на выходе САУ
Система автоматизации на котлоагрегатах
147822
знака
34
таблицы
94
изображения
5.3.4 Расчет дисперсии и спектра величины на выходе САУ

Рисунок 5.3.7 Функции спектральной плотности реализаций Z
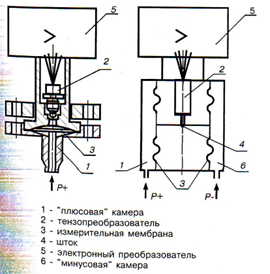
Освоив математический аппарата частотного моделирования, попробуем рассчитать дисперсию и спектр на выходе системы автоматической стабилизации плотности шлама, разгружаемого из гидростатического отстойника. На входе САУ действует целый комплекс возмущающих воздействий. При этом на выходе САУ наблюдается приведенное возмущение:
u 0, z = y.
Для расчета спектра выходной величины обратимся к модели апериодического звена первого порядка с запаздыванием.
Задаём нормированный параметр канала управления:
’ = /T = 1мин./15мин.= 0.066 у.е.вр.
В САУ время нормируется по постоянной T канала управления.
Задаем нормированные параметры входа САУ:
D’z = 1, T’СП = 10 у.е.
Этим мы определяем область фильтрации приведенного возмущения:
TСП = T’СПT = 10у.е.15мин. = 150мин,
T12 = TСП / T10 = 150мин. / 0,3о.е. = 500мин.
Грубо рассматриваемая САУ может полноценно фильтровать коррелированные шумы со временем спада в четверть часа и закономерные составляющие с периодом появления 4 часа.
Нормированные параметры регулятора устанавливаем по подсказке преподавателя:
K’Р = 1, K’I = 0,5.
Рассчитываем с помощью специализированной программы частотные характеристики САУ. Функция спектральной плотности входной и выходной величины САУ показаны на рис. 5.3.8.
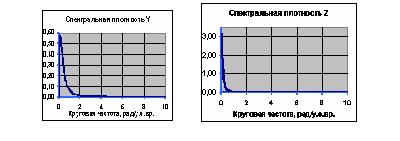
Рисунок 5.3.8 Функции спектральной плотности на входе и выходе САУ
Нормированная выходная дисперсия равна 0,101793 (D’y=0,101793), что означает снижение входной дисперсии в 9,8 раз.
Определим теперь степень снижения диапазона колебаний стабилизируемой величины y после подключения САУ:
![]() 0,32
0,32
Чтобы рассчитать абсолютное СКВО, требуется знать дисперсию шума, подаваемого на вход САУ. Для этого на практике выбирают отрезок времени, в течение которого регулятор был отключен, и изучают колебания выходной величины. В нашем случае дисперсия колебаний Y равна 0,0009 (т/м3)2, СКВО равно 0,3 т/м3.
Абсолютное СКВО рассчитываем по формуле:
![]() 0,0095
т/м3.
0,0095
т/м3.
4 СКВО дают наиболее вероятный диапазон колебаний стабилизируемой величины y в абсолютных единицах:
Дy = 4y = 40,0095 = 0,038 т/м3.
Анализируя этот материал, мы можем сделать следующие выводы:
Расчетные статистики выгодно использовать для сопоставительного анализа неслучайных свойств изменяющихся во времени величин или одной и той же величин, но в разные моменты ее "жизни",
Средний уровень изменений Х(t) фиксирует статистическая оценка Хср;
Оценкой скорости колебаний может служить время спада автокорреляционной функции, чем она больше, тем медленнее в среднем колеблется Х(t);
Анализ спектра колебаний позволяет дополнительно увидеть, на каких частотах преимущественно сосредоточена мощность колебаний Х(t).
5.4 Устойчивость САУ. Классы требований к качеству управления
5.4.1 Формулирование требований к САУ
Рассматривается система автоматического регулирования подачи топлива в печь спекания. Для спекания шихты на глиноземных заводах используются трубчатые вращающиеся печи. С одной стороны в печь поступает топливо – угольная пыль в смеси с воздухом. С другой стороны в печь подается сырье – и выводятся газы. Получаемый продукт – спек – из печей подается на участок дробления.
Нормальная работа печи спекания характеризуется определенной концентрацией кислорода в отходящих газах, по которой косвенно оценивают количество сгораемого топлива. Чем больше топлива сгорает в печи, тем меньше становится концентрация кислорода в отходящих газах.
Если концентрация по показаниям прибора превышает задание, необходимо увеличить подачу топлива в печь, повышая частоту вращения привода.
Система автоматического регулирования подачи топлива в печь спекания относится к тем САУ, для которых не важно наличие небольшой статической ошибки регулирования. Поэтому относим эту системы к классу "В" (классификация САУ по статическим свойствам).
Итак, формализовались требования к САУ в рамках описанной классификации: устойчивость, класс "В", группа II.
5.4.2 Выбор области работы САУ
Канал управления в нашей системе идентифицирован как звено первого порядка с запаздыванием: S=1. Нами определено среднее значение нормированного транспортного запаздывания: '=0,066. Ориентируясь на желание минимизации дисперсии и длительности переходных процессов, наиболее приемлемой считаем рабочий район поиска настроек:
K'P - от 2 до 4, K'I - от 1 до 2 (назовем этот район базовым).
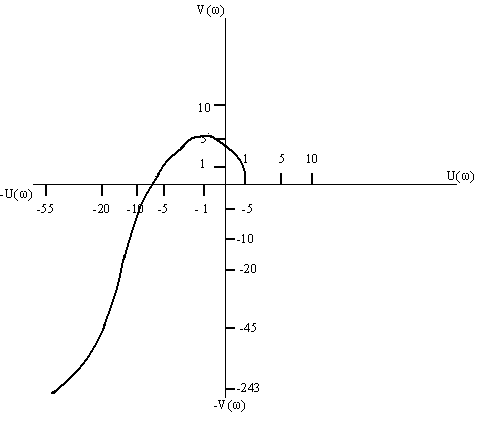
Ниже приведены годографы Найквиста для трех точек, выбранных на графике области устойчивости в пространстве для систем типа S=1.
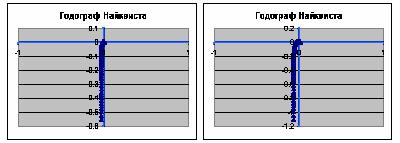
Анализируя графики, делаем вывод, что система наиболее устойчива при значениях коэффициентов Кр = 2,1 и KI=0,7 (т.е. третий график).
Проделаем то же самое для трех точек, выбранных на графике области работы САУ, при S=1 и ' = 0,066.
Для нашей системы типа II класса В значения коэффициентов:
K'P - от 10 до 12, K'I - от 2 до 4.
В этих пределах система не устойчива (ниже приведен годограф Найквиста при значениях K'P =10, K'I = 2).

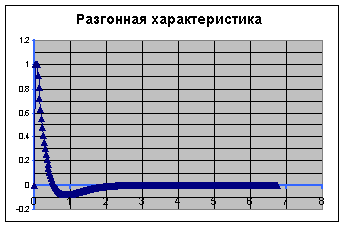
Рассмотрим поведение системы при изменении оптимального значения коэффициента KI в диапазоне 30%.
При KI=0,5 получаем графики:


При KI=0,9 получаем графики:
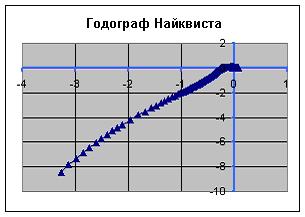


Используя критерий Найквиста, определили область устойчивости нашей системы и оптимальные значения коэффициентов. Выбрали этот критерий, потому что он позволяет легко определить, устойчива система или нет с помощью годографа.
Определили, что хотя система и относится ко второму типу, при выбранных трех точках значений коэффициентов, она не устойчива в этих пределах.
Заключение
В данном курсовом проекте, в соответствии с поставленной задачей управления, была предложена модернизация системы управления котлоагрегатом.
Была разработана функциональная схема котлоагрегата и произведен выбор полевой автоматики.
В качестве технической базы спроектированной системы автоматизации был предложен регулирующий микропроцессорный контроллер GE Fanuc и персональная ЭВМ. Преимуществом модернизированной системы является более точная реализация процесса регулирования, основанная на цифровой обработке информации.
Использование ПЭВМ со SCADA-пакетом CYMPLICITY даёт большие возможности для представления информации человеку, функцией которого является многокритериальное управление котлоагрегатом.
Результат применения предлагаемой модернизации состоит в стабилизации параметров технологического процесса, за счёт увеличения объёма и качества обработки информации, позволяющей технологическому персоналу принимать своевременные и оптимальные решения при внештатных ситуациях.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ:
М.И. Резников, Ю.М. Липов «Паровые котлы тепловых электростанций»
Н.А. Киселев «Промышленные котельные установки»
«Эксплуатация паровых котлов и паротрубопроводов» под ред. Божко
Н.И Еремин, А.Н Наумчик, В.Г Казаков «Процессы и аппараты глиноземного производства»
Н.А. Киселев «Устройство и эксплуатация котлов»
В.М. Максимов «Котельные агрегаты большой паропроизводительности»
В.Г. Александров «Паровые котлы средней и малой мощности»
«Теплотехника» под редакцией А.П. Баскакова
С.Я. Белинский «Теплофикация и теплоэлектроцентрали»
«Учет и контроль расхода энергоносителей и тепловой энергии» под редакцией В.С. Кахановича
«Основы автоматизации для металлургов» под редакцией И.А. Грязновой
Н.Я. Турчин «Инженерное оборудование тепловых электростанций и монтажные работы»
А.С. Клюев, А.Т. Лебедев, С.И.Новиков «Наладка систем автоматического регулирования барабанных паровых котлов»
Н.Н.Лариков «Теплотехника»
«Справочник эксплуатационника газовых котельных»
П.Н.Мануйлов «Теплотехнические измерения и автоматизация тепловых процессов»
В.С.Чистяков «Краткий справочник по теплотехническим измерениям»
В.С.Вергазов «Устройство и эксплуатация котлов». Справочник.
А.М., В.А.,П.Г.Удыма «Проектирование, монтаж и эксплуатация тепломассообменных установок»
Д.Н. Кемельман, Н.Б.Эскин «Наладка котельных установок». Справочник.
Р.Беккер «Теория теплоты».
Инженерный синтез основной системы регулирования
Любая система регулирования должна поддерживать регулируемую величину с наименьшими отклонениями от заданного значения. На практике чаще всего требуемая точность работы может быть достигнута за счет повышения чувствительности регулятора к отклонениям регулируемой величины. Однако это может привести к возникновению колебаний в замкнутой системе автоматического регулирования и потере устойчивости. В связи с этим обеспечивание устойчивости при всех встречающихся на практике режимах работы объекта автоматизации (для данной курсовой работы = это автоматизации котлоагрегата) является первоочередной задачей проектирования, наладки и эксплуатации систем регулирования.
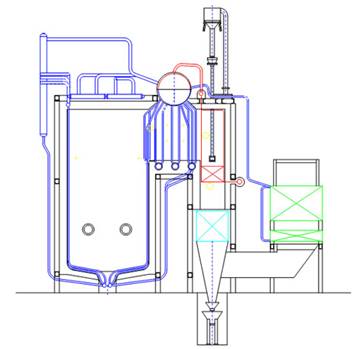
Имеется котлоагрегат (ОУ). Вода, проходя через котлоагрегат, нагревается паром с регулируемым расходом. Необходимо синтезировать робастную систему автоматического регулирования температуры воды на выходе котлоагрегата. Управляемой величиной Y будет температура воды на выходе, а управляющим воздействием U – расход пара на котлоагрегат (процент открытия клапана на трубопроводе пара).
Исходные данные:
U=1
Y= 1+0.01*n=1+0.01*22=1.22, где n – номер варианта
Транспортное запаздывание:
=2+n/4=2+22/4=7.5
Постоянная времени
T=10+n/4=10+22/4=15.5
Программный пакет Р2_0 имитирует работу одноконтурной линейной САР. Канал ОУ в нем задан инерционным звеном первого порядка
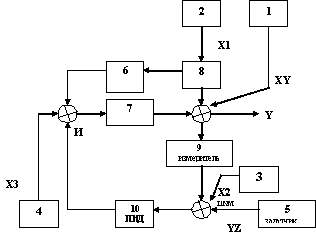
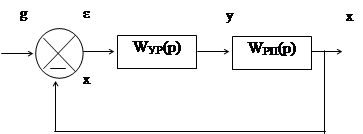
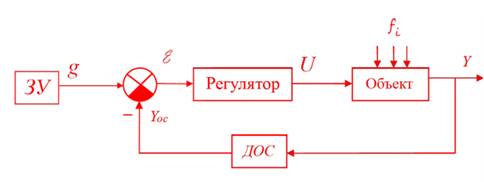
Рис.1 Структурная схема одноконтурной линейной системы автоматического регулирования стабилизации с ПИ – регулятором.
XY – приведенное возмущение; YZ – заданное значение; X1 – контролируемое значение;
X2 – шумы в канале возмущения; X3 – шумы в канале управления.
Блоки 1…4 – блоки формирования воздействий XY, X1, X2, X3 можно задать с помощью меандра или синусоиды, их параметры – амплитуда и полупериод колебаний.
Блок 5 – блок формирования YZ (задание).
Блок 6 – компенсатор возмущения (KB) Х1 - пропорциональное звено, если равно 0, то KB не работает.
Блок 7- канал управления - инерционное звено первого порядка, описывается тремя параметрами:
K1- коэффициент усиления;
T1- постоянная времени;
R1 - транспортное запаздывание.
Блок 8- канал передачи возмущения X1 - инерционное звено первого порядка.
Параметры: K2, T2, R2.
Блок 9- измеритель величины.
Параметры: К3, Т3, R3. Если T2=R2, то непрерывное автоматическое измерение.
Блок 10- ПИД-регулятор. Передаточная функция: - K0 (1+L0/p+ R0*р).
K0- коэффициент усиления;
L0- постоянная интегрирования;
R0 - постоянная дифференцирования.
Анализ реакций нерегулируемого объекта управления на типовые воздействия.
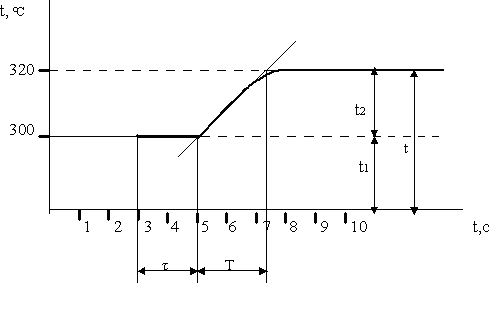
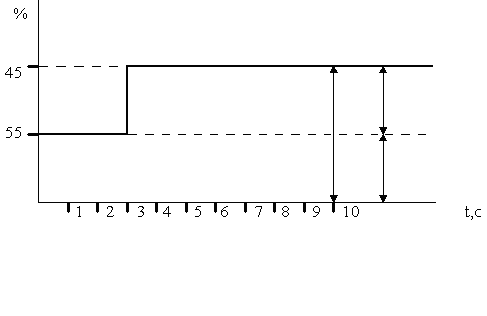
Строим график переходного процесса (рис.2) при подаче на вход ОУ – меандра. Для этого задаем входное воздействие с помощью звена X3. При этом обнуляем приведенное возмущение ХУ и отключаем ПИ – регулятор.

Рис.2 Переходной процесс при подаче на вход - меандра
Строим график переходного процесса при подаче на вход ОУ – синусоиды. Входное воздействие задаем с помощью звена X3, и обнуляем приведенное возмущение ХУ и отключаем ПИ – регулятор.
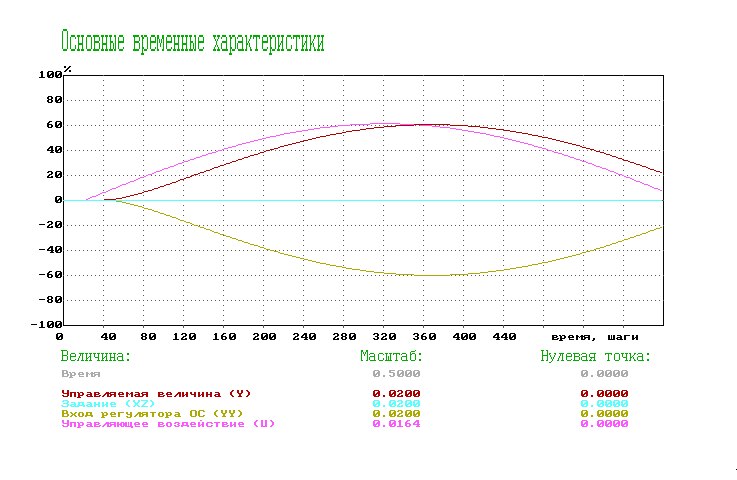
Рис.3 Переходной процесс при подаче на вход – синусоиды
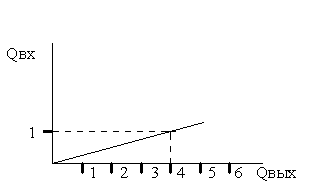
Строим (рис.4) амплитудно-частотную характеристику (АЧХ) ОУ (инерционного звена первого порядка). Для этого подаем на вход ОУ синусоидальное воздействие. С помощью изменения полупериода находим значения амплитуды по графику. Делаем несколько замеров, и строим АЧХ. На графике (рис.4) показана зависимость частоты от амплитуды.
| Частота | 0,05 | 0,025 | 0,016 | 0,0125 | 0,01 | 0,0083 | 0,0071 |
| Амплитуда | 0,36 | 0,56 | 0,76 | 0,8 | 0,9 | 1 | 1,1 |
Рис.4 Амплитудно-частотная характеристика
Настройка ПИ – регулятора на наилучшее качество переходного процесса
Для базового объекта, характеризующегося пятью заданными параметрами – K1, R1, T1, Т3, R3 выполняем настройку ПИ – регулятора. Для этого подбираем K0, L0, R0 (табл.1) и настраиваем систему на наилучшее качество переходного процесса.
Таблица 1
| № | К1 | Т1 | R1 | T3 | R3 | K0 | L0 | R0 | Tрег. | Gпер | Kзат. | Tсоб. | Vсоб. |
| 1 | 1,22 | 15,5 | 7,5 | 0 | 0 | 0,885 | 0,105 | 0 | 69 | 20 | 2,5 | 58 | 0,04 |
| 2 | 1,22 | 15,5 | 7,5 | 0 | 0 | 0,895 | 0,095 | 0 | 71 | 16 | 4 | 48 | 0,055 |
| 3 | 1,22 | 15,5 | 7,5 | 0 | 0 | 0,905 | 0,075 | 0 | 47 | 8 | 2,6 | 47 | 0,056 |
| 4 | 1,22 | 15,5 | 7,5 | 0 | 0 | 0,937 | 0,0665 | 0 | 43 | 7,5 | - | - | - |
| 5 | 1,22 | 15,5 | 7,5 | 0 | 0 | 0,817 | 0,056 | 0 | 27 | - | - | - | - |
Tрег - время регулирования (мин.);
Gпер – перерегулирование, % (Gпер = в);
Kзат – коэффициент затухания, Kзат=в/а;
Tсоб – период собственных колебаний, мин.;
Vсоб. – частота собственных колебаний, Vсоб =2/ Tсоб.

Вывод:
Синтез робастной САР, учитывающий дрейф и неточные знания параметров ОУ
Анализируем 2 варианта K1, T1, R1 при определенных наилучших настройках ПИ регулятора, результаты заносим в таблицу (табл.2)
первый вариант - условно благоприятный объект - параметры объекта управления на 30% ниже номинала;
второй вариант – условно неблагоприятный объект – параметры объекта управления на 30% выше номинала.
Таблица 2
| № | K1 | T1 | R1 | T3 | R3 | K0 | L0 | R0 | Tрег | Gпер | Kзат. | Tсоб. | Vсоб |
| 1 | 0,854 | 10,85 | 5,25 | 0 | 0 | 0,817 | 0,056 | 0 | 72 | 16 | 4 | 60 | 0,1 |
| 2 | 1,586 | 20,15 | 9,75 | 0 | 0 | 0,817 | 0,056 | 0 | 74 | - | - | - | - |
Похожие работы

... /см2) предназначены для выработки насыщенного или перегретого пара, используемого для технологических нужд промышленных предприятий, на теплоснабжение систем отопления и горячего водоснабжения. Масса котельной установки 16,5 т, температура питательной воды 100 С, температура пара 210 С. В качестве сжигаемого топлива используют газ или мазут.Котлы двухбарабанные вертикально-водотрубные выполнены по ...
... чином вище сформульовано і зазначено основні пропозиції КП «Здолбунівкомуненергія» щодо покращення управління персоналом. 3.3 Реструктуризація виробництва, як шлях стратегічного управління Як було зазначено в пункті 2.1 даної курсової роботи на підприємстві КП «Здолбунівкомуненергія» здебільшого такі котельні установки, ресурсний потенціал яких давно вичерпаний. Відповідно підприємство у ...



... режимов функционирования котла. Повышение экологических характеристик котельной и культуру производственного процесса. Благодаря программному управлению система автоматически отслеживает все параметры текущих процессов, реализуемых водогрейными и паровыми котлами, и управляет технологическим оборудованием, обеспечивая нормальное и безаварийное функционирование котельной установки. Кроме того, ...

... , по приведённой методике, производится расчёт экономической эффективности внедрения автоматизации редукционно-охладительной установи и сравнение технико-экономических показателей работы подразделения. Экономическая эффективность внедрения системы автоматического контроля и регулирования редукционно-охладительной установки определяется путём сопоставления технико-экономических показателей работы ...
0 комментариев