Формальная модель нейрона и нейросети
Краткое описание метода автономного адаптивного управления
Основные понятия и обозначения
Моделирование среды
Аппарат формирования и распознавания образов
Задача построения ФРО
Распознавание пространственно-временных образов
Система построения и исследования нейронных сетей СПИНС
Конструкторы сетей. Библиотеки шаблонов
Организация вычислений в сети
Реализация модели среды
Навигация
Краткое описание метода автономного адаптивного управления
Нейросетевая реализация системы
61847
знаков
3
таблицы
10
изображений
1.3. Краткое описание метода автономного адаптивного управления.
Метод ААУ подробно описан в работах [Жданов3-9], поэтому представим только основные его стороны. Будем называть управляющей системой (УС) систему управления, имитирующую нервную систему в соответствии с методологией ААУ. Под объектом управления (ОУ) будем понимать организм, который несет в себе нервную систему, другими словами, ОУ - это объект, который должен управляться посредством УС, расположенной внутри ОУ и взаимодействующей со своим окружением посредством блока датчиков (БД) и исполнительных органов (ИО).
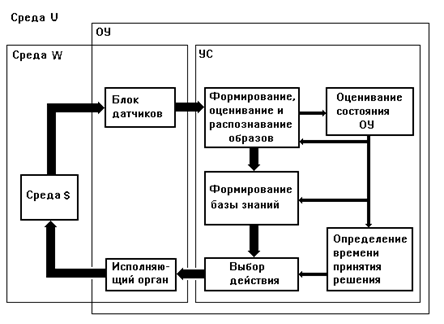
Рис. 1.3.1.
На рис. 1.3.1 представлена система, под которой будем понимать среду, в которую вложен ОУ, в свою очередь содержащий в себе УС. Как видно из рисунка, можно утверждать, что УС управляет не только ОУ, но всей системой. Под средой в системе можно понимать разные объединения объектов. Будем называть средой W совокупность объектов, лежащих вне УС; средой S - совокупность объектов, лежащих вне ОУ; средой U - всю систему.
Блок датчиков поставляет УС входную информацию в виде двоичного вектора. Этот блок необходим в реальных системах для сопряжения среды и УС, поэтому при моделировании УС на ЭВМ не использовался и мы не акцентируем внимание на нем в данной работе.
Работу блока формирования и распознавания образов (ФРО) можно представить следующим способом (подробное описание см. в работах [Жданов3, Жданов8]). В блоке ФРО на основании априорной информации о возможных функциональных свойствах среды заданы некоторые объекты, назовем их нейронами (например, нейроны специального вида, описанные в работе [Жданов8]), на которые отображаются некоторые классы пространственно-временных явлений, которые потенциально могут существовать в системе. Отображение задается топологией сети. В классе, отображаемом на нейрон, выделяется подкласс, который может восприниматься данным нейроном. Каждый нейрон может статистически анализировать воспринимаемый им подкласс. Накапливая статистическую информацию о воспринимаемом подклассе, нейрон может принять решение, является ли этот подкласс случайным или неслучайным явлением в системе. Если какой-либо нейрон принимает решение, что отображаемый на него подкласс является неслучайным событием, то он переходит в некоторое отличное от исходного ²обученное² состояние. Если нейрон обучен, то будем говорить также, что сформирован образ, этот образ идентифицируется номером данного нейрона. Подкласс явлений, воспринимаемый нейроном, и вызвавший его обучение, то есть пространственно-временные явления, статистически достоверно существующие в системе, называется прообразом данного образа. Сформированный образ может быть распознан блоком ФРО, когда прообраз данного образа наблюдается БД. Блок ФРО указывает, какие из сформированных образов распознаны в текущий момент. Одновременно с этим распознанные образы участвуют в формировании образов более высоких порядков, то есть имеет место агрегирование и абстрагирование образов.
Блок формирование базы знаний [Жданов4-6] (БЗ) предназначен для автоматического представления эмпирически найденных УС знаний о функциональных свойствах системы. Элементарной конструкцией базы знаний (БЗ) в методе ААУ является статистически достоверное сведение о том, как определенное действие Yj влияет на прообраз определенного сформированного образа. Действием Yj названо подмножество множества допустимых воздействий, элементы которого абсолютно идентичны для УС по их влиянию на сформированные образы. Непустое сведение может иметь одно из двух значений: либо действие Yjвлечет распознавание образа Oi , либо действие Yjвлечет вытеснение образа Oi. При помощи БЗ можно видеть, как конкретное действие влияет на всю совокупность сформированных образов.
Блок оценки состояния [Жданов7] (БОС) вырабатывает интегральную оценку качества состояния ОУ St. Оценка St используется для расчета оценки (веса) pi каждого из вновь сформированных образов некоторым статистическим способом. В свою очередь, St функционально зависит от оценок pi распознанных образов. Имеется некоторое множество изначально сформированных и оцененных образов. Оценка St используется также для расчета темпа принятия решений.
Блок выбор действия [Жданов4-6] или, в дальнейшем, блок принятия решений (БПР) реализует процедуру принятия решения, основанную на анализе текущей ситуации, целевых функций, содержимого БЗ, а также оценки текущего значения оценки St. Фактическая информация о текущей ситуации представлена множеством образов, распознанных в текущий момент блоком ФРО, а информация о качестве текущего состояния представлена оценкой St. Множество распознанных образов определяет в БЗ тот ее раздел, который адекватен текущей ситуации (те знания, которые истинны в текущих условиях). В соответствии с целевой функцией, предполагающей стремление УС к улучшению качества состояния ОУ, УС выбирает по БЗ то действие, которое имеет максимальную сумму оценок вызываемых и вытесняемых образов. Из множества выходных воздействий, соответствующего выбранному действию Yj, конкретное выходное воздействие выбирается случайным способом, что соответствует второй целевой функции, предусматривающей стремление к получению новых знаний.
Блок определение времени принятия решения определяет глубину просмотра БЗ в зависимости от текущей оценки St. Чем выше значение St, тем больше образов (в порядке убывания модуля их веса) может учесть УС при принятии решения, тем меньше темп принятия решений. При моделировании этот блок не использовался и в данной работе рассматриваться не будет.
В УС могут быть средства для априорного анализа последствий альтернативных выбираемых действий на несколько шагов вперед.
Таков в самых общих чертах алгоритм управления, реализуемый УС в методе ААУ. Основные свойства процесса управления состоят в том, что УС автоматически накапливает эмпирические знания о свойствах предъявленного ей объекта управления и принимает решения, опираясь на накопленные знания. Качество управления растет по мере увеличения объема накопленных знаний. Заметим также, что управление состоит не в том, что УС реагирует на входную информацию (в определенном смысле - отрицательная обратная связь), а в том, что УС постоянно активно ищет возможный в текущих условиях способ улучшить состояние ОУ (положительная обратная связь). Тем самым УС ААУ обладает внутренней активностью.
При создании приложений может быть целесообразным использование УС ААУ для управления только в тех областях пространства признаков, в которых ранее используемые методы неэффективны. Другими словами, полезно разделить признаковое пространство на две области: на область, для которой имеется априорная информация о свойствах ОУ, и в которой можно применить подходящую детерминированную систему управления, и на область, в которой нет априорной информации о свойствах ОУ, где требуется адаптация в реальном времени управления, в этой области целесообразно управление по методу ААУ.
Похожие работы
... , бистабильность восприятия. В дальнейшем планируется разработка программных моделей более сложных нейронных сетей и их комбинаций с целью получения наиболее эффективных алгоритмов для задачи распознавания образов. Литераура. 1.Горбань А.Н.,Россиев Д.А..Нейронные сети на персональном компьюере. 2. Минский М.Л.,Пайперт С..Персепроны.М.: Мир.1971 3. Розенблатт Ф.Принципы ...
... того привлекает огромный запас контекстных знаний, который системам распознавания образов пока недоступен. 7. Заключение Дан обзор различных нейросетевых методов распознавания изображений. Рассмотрены достоинства и недостатки этих методов при распознавании двумерных и трёхмерных объектов. Указаны проблемы при распознавании трёхмерных объектов. Выделены перспективные направления в распознавании ...
... в популяциях, которые являются существенными для развития. Точный ответ на вопрос: какие биологические процессы существенны для развития, и какие нет? - все еще открыт для исследователей. Реализация генетических алгоритмов В природе особи в популяции конкурируют друг с другом за различные ресурсы, такие, например, как пища или вода. Кроме того, члены популяции одного вида часто конкурируют ...
... на дипломное проектирование. Необходимо разработать программу регистрации процеса производства партий полупроводниковых пластин для использования в автоматизированной системе управления. Программа должна обеспечивать контроль и регистрацию производственного процесса производства партий пластин. Вести учет за прохождением партий полупроводниковых пластин по технологическому маршруту. Разработку ...
0 комментариев