Методика и оборудование для лабораторных и стендовых исследований рулевого привода и шарниров рулевых тяг
Конструкция стенда для оценки технического состояния рулевого управления легковых автомобилей
Методика выполнения стендовых исследований эксплуатационного состояния рулевого управления автомобилей
Методика измерения смещений в кинематической цепи рулевого привода и в шарнирах рулевых тяг при движении автомобиля
Полный факторный эксперимент –«24 »
Анализ результатов экспериментальных исследований
Результаты стендовых исследований эксплуатационного состояния рулевого привода легковых автомобилей
Результаты дорожных и сравнительных исследований характеристик и состояния рулевого привода
Диаграммы составляющих угла свободного хода рулевого колеса
Навигация
Методика измерения смещений в кинематической цепи рулевого привода и в шарнирах рулевых тяг при движении автомобиля
Инструментальное и методологическое обеспечение экспериментальных исследований рулевого управления автотранспортных средств
83154
знака
9
таблиц
25
изображений
6.1 Методика измерения смещений в кинематической цепи рулевого привода и в шарнирах рулевых тяг при движении автомобиля
Для получения величин приращения расстояния между рычагами поворотных, цапф, т.е. смещений в кинематической цепи рулевой трапеции, была разработана методика, основывающаяся на применении прецизионных датчиков перемещений - механотронов - электронных ламп 6MX5/IC, используемых в робототехнике, собственная погрешность измерения которых не более 1%. Механотроны устанавливались в специальный патрон, который крепился с помощью кронштейна к рычагам поворотных цапф, т.е. был жёстко соединён с наконечником боковой рулевой тяги. При этом, запись относительных смещений элементов рулевых шарниров велась в диапазоне величин углов поворота управляемых колёс до 5°.
Смещения в рулевой трапеции регистрировались при помощи раздвижной подпружиненной линейки, состоящей из двух штанг, концы которых шарнирно крепились к поворотным рычагам цапф, обеспечивая возможность регистрации относительных смещений в кинематической цепи РП с одновременным поворотом УК и безопасность проведения испытаний.
Тарировка механотронов и измерительных систем производилась при помощи индикатора часового типа ИГ-0,002 со специальным заострённым калёным наконечником, который устанавливался на раздвижную линейку и на боковых рулевых тягах. Величины смещений задавались по шкале индикатора и, одновременно, записывались на осциллограф сигналы механотронов, по которым затем строились тарировочные зависимости. Погрешность измерения определяется аналогично методике измерения усилий в РП при движении автомобиля.
6.2 Измерительно-регистрирующая аппаратура
Измерительный комплекс, установленный в переоборудованном салоне серийного автомобиля позволял регистрировать следующие параметры:
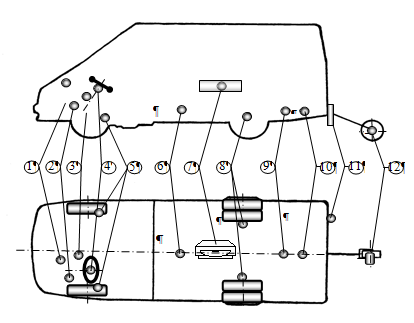
SШП(Л) - относительные радиальные смещения шарового пальца в наконечнике правой и левой боковых рулевых тяг;
SРП - приращение расстояния между рычагами поворотных цапф, т.е. смещение в РП или изменение схождения УК;
FП(Л) - усилия на рычагах поворотных цапф передней подвески;
F РС - усилие на рулевой сошке;
VA - продольную скорость поступательного движения автомобиля;
t - время.
Комплекс измерительно-регистрирующей аппаратуры, размещённый в салоне автомобиля, включал электронные лампы 6MXIC и 6МХ5С - датчики, преобразующие механические перемещения в электрические величины, установленные в специальных металлических патронах, снабжённых ограничителями перемещений мерных штифтов. Последнее позволило избежать поломки механотронов вследствие ударных нагрузок и других факторов, которыми сопровождался процесс испытания рулевого привода.
Мерные штифты механотронов были наращены в соотношении плеч, соответственно : измерители относительных смещений элементов шарниров - лампы 6 МХIС - 1:3 (диапазон измерения ± 0,5 мм, погрешность 1,5-3%); измерители смещения в кинематической цепи рулевого привода, т.е. приращения расстояния между рычагами поворотных цапф - лампа 6МХ5С -1:5 (диапазон измерения ± 10 мм, погрешность 2,5-3,5%).
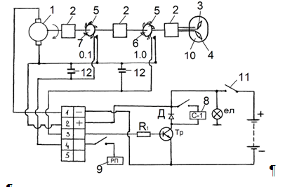
Для управления и питания механотронов был сконструирован специальный блок, обеспечивающий настройку и визуальный контроль величины и направления сигнала, подаваемого в измерительные каналы. Этот же блок использовался для сравнения результатов в стендовых и лабораторных условиях нагружения рулевого привода автомобиля.
Для измерения изменения схождения управляемых колёс в процессе движения автомобиля разработана методика регистрации смещений при помощи сконструированной раздвижной линейки, штанги которой подпружинены, а их относительное перемещение регистрировалось в салоне посредством гибкового вала. На концах линейки установлены шарнирные наконечники, что позволило регистрировать приращение расстояния между поворотными рычагами рулевой трапеции при любых углах поворота УК.
Перемещение гибкого вала регистрировалось в салоне автомобиля механотроном 6МХ5С, установленном в патроне на специальном кронштейне, допускающим регулировки диапазона измерения смещений и установку нулевого значения измерительного устройства.
Относительное смещение шарового пальца в наконечнике боковой рулевой тяги регистрировалось механотронами 6MXIC, установленными так же на специальных кронштейнах, жёстко связанных с рычагами поворотных цапф, в металлических патронах. На этом же кронштейне шарнирно закреплялась раздвижная линейка для измерения смещений в кинематической цепи рулевого привода при поворотах УК.
Усилие на поворотных рычагах цапф и рулевой сошке регистрировалось методом тензометрирования при помощи тензорезисторов, соответственно, 2ПКБ-10-200Х и 2ПКБ-10-100Х с базой 10 мм, соединённых по полумостовой схеме. При деформации поворотных рычагов и рулевой сошки электрический сигнал от тензодатчиков усиливался тензоусилителем «Топаз-2», после чего поступал на вход шлейфового осциллографа Н-700 и записывался на светочувствительную бумагу, одновременно регистрировались и перечисленные выше величины смещений.
Осциллограф Н-700 и тензоусилитель «Топаз-2» устанавливались на резиновых амортизаторах в салоне автомобиля. Тензодатчики и измерительная аппаратура были соединены экранированным кабелем. Отметки времени через 0,1 с выполнялись отметчиком осциллографа Н-700.
Питание измерительно-регистрирующего комплекса осуществлялось постоянным током напряжением 24В, согласно схеме (рис.4) от двух аккумуляторных батарей 6-СТ-7
На рисунке 5 приведён образец осциллограммы дорожных испытаний.
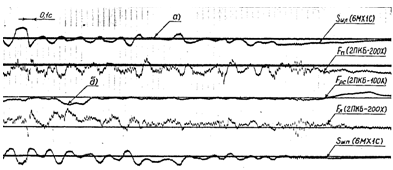
Рис. 5 Запись усилий на рулевой сошке, правом и левом поворотных рычагах цапфы и относительных смещений шарового пальца в наконечнике правой и левой боковых рулевых тяг в процессе трогания с места на прямолинейном участке асфальтобетонного шоссе. Вначале осциллограммы показано влияние наводки электрооборудования двигателя на сигнал измерителей
Похожие работы

... и др., а также приобретен преподавателями ВУЗов ценный опыт ездовых испытаний автомобилей. 3. Оценка параметров устойчивости и управляемости АТС в стендовых условиях Устойчивость и управляемость АТС в значительной степени определяют активную безопасность автотранспортных средств (АТС) и, следовательно, общий уровень безопасности дорожного движения (БДД). В настоящее время международные и ...

... запаховых следов человека, организации и ведение отчетности. 4. Порядок взаимодействия экспертно-криминалистических центров с кинологической и другими службами органов внутренних дел. Рассмотрена организация проведения экспертиз и исследований запаховых следов человека в экспертно-криминалистических подразделениях органов внутренних дел РФ. Предложены решения ряда организационных вопросов по ...
... ) запаховых следов с объектов испарением и конденсацией образующих такие следы веществ. На этом этапе была разработана и апробирована методика судебной экспертизы запаховых следов человека с использованием тестирующих запахоносителей и сигналов собак-детекторов в качестве средств исследования. С помощью эталонных проб решена задача контроля и расшифровки сигнального поведения применяемых собак. ...
0 комментариев