Навигация
Трассовая обзорная РЛС «Скала - М»
51777
знаков
2
таблицы
7
изображений
1.4. Трассовая обзорная РЛС «Скала - М»
Рассматриваемая РЛС представляет собой комплекс, в который входят ПРЛ и вторичный канал «Корень». РЛС предназначена для контроля и управления и может быть использована как в автоматизированных системах управления воздушным движением, так и в неавтоматизированных центрах УВД.
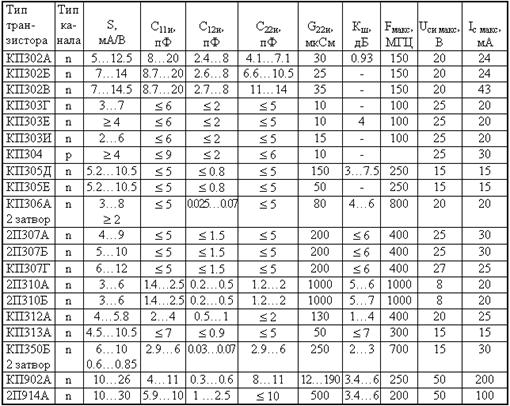
Основные параметры радиолокатора «Скала-М» приведены ниже.
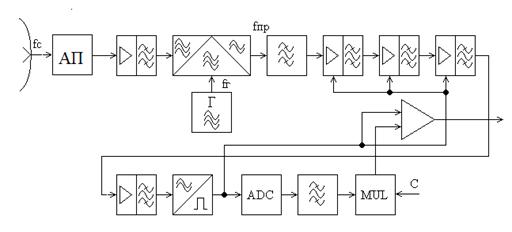
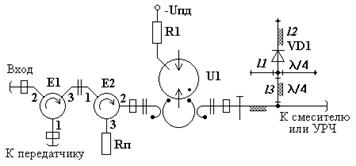
Структурная схема РЛС «Скала-М» представлена на рис. 2. В ее состав входят первичный радиолокационный канал (ПРК), вторичный радиолокационный канал (ВРК), аппаратура первичной обработки информации (АПОИ) и коммутирующее устройство (КУ).
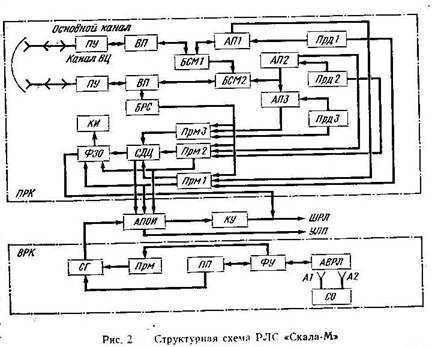
В ПРК входят: поляризационные устройства ПУ; вращающиеся переходы ВП, два блока сложения мощностей БСМ1 (2); антенные переключатели АП1 (2, 3); передатчики Прд (2, 3); блок разделения сигналов БРС; приемники Прм 1 (2, 3); система селекции движущихся целей СДЦ; устройство формирования зоны обнаружения ФЗО и контрольный индикатор КИ. Вторичный радиолокационный канал включает в себя: антенную систему ВРЛ АВРЛ; самолетный ответчик типа СОМ-64, используемый в качестве устройства, контролирующего работу ВРК-СО; фидерное устройство ФУ; приемопередающее устройство, используемое в режиме «RBS» ПП; устройство согласования СГ и приемное устройство, используемое в режиме УВД-ПРМ.
Съем и трансляция информации осуществляются с помощью широкополосной радиорелейной линии ШРЛ и узкополосной линии передачи УЛП.
Первичный канал РЛС представляет собой двухканальное устройство и работает на трех фиксированных частотах. Нижний луч ДНА формируется облучателем основного канала, а верхний - облучателем канала индикации высоколетящих целей (ИВЦ). В РЛС реализована возможность одновременной обработки информации в когерентном и амплитудном режимах, что позволяет проводить оптимизацию зоны обзора, представленную на рис. 3.
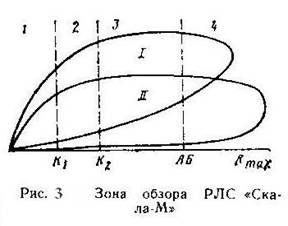
Границы зоны обнаружения устанавливаются в зависимости от помеховой ситуации. Их выбор определяется импульсами, вырабатываемыми в КИ, управляющими коммутацией в АПОИ и видеотракте.
Участок 1 имеет протяженность не более 40 км. Информация формируется при помощи сигналов верхнего луча. При этом подавление отражений от местных предметов в ближней зоне составляет 15 ... 20 дБ.
На участке 2 используются сигналы верхнего луча при работе приемо-анализирующего устройства в амплитудном режиме и сигналы нижнего луча, обработанные в системе СДЦ, причем в канале нижнего луча используется ВАРУ, имеющая динамический диапазон на 10 ...15 дБ больше, чем в канале верхнего луча, что обеспечивает контроль за местоположением ВС, находящимся под малыми углами места.
Второй участок заканчивается на таком удалении от РЛС, при котором эхо-сигналы от местных предметов, принимаемые нижним лучом, имеют незначительный уровень.
На участке 3 используются сигналы верхнего луча, а на 4 - нижнего луча. В приемо-анализирующем тракте осуществляется режим амплитудной обработки.
Вобуляция частоты запуска РЛС позволяет устранить провалы в амплитудно-скоростной характеристике и устранить неоднозначность отсчета. У ПРДЗ частота повторения зондирующих сигналов 1000 Гц, а у первых двух 330 Гц. Увеличенная частота следования повышает эффективность СДЦ за счет уменьшения влияния флюктуации местных предметов и вращения антенны.
Принцип работы аппаратуры ПРК заключается в следующем.
Высокочастотные сигналы передающих устройств подаются через антенные переключатели на устройства сложения мощностей и далее через вращающиеся сочленения и устройство управления поляризацией к облучателю нижнего луча. Причем на участках 1 и 2 зоны обнаружения используются сигналы первого приемопередатчика, поступающие по верхнему лучу и прошедшие обработку в СДЦ. На 3 - композиционные сигналы, поступающие по обоим лучам и обработанные в амплитудном канале первого и второго приемопередатчиков, а на 4 - сигналы первого и второго приемопередатчиков, поступающие по нижнему лучу и обработанные в амплитудном канале. При отказе любого из комплектов его место автоматически занимает третий приемопередатчик.
Устройства сложения мощностей производят фильтрацию принятых нижним лучом эхо-сигналов и в зависимости от несущей частоты передают их через АП на соответствующие приемо-анализирующие устройства. Последние имеют раздельные каналы обработки сигналов основного луча и луча канала индикации высоколетящих целей (ИВЦ). Канал ИВЦ работает только на прием. Его сигналы проходят поляризационное устройство и после блока разделения сигналов поступают на три приемника. Приемники выполнены по супергетеродинной схеме. Усиление и обработка сигналов промежуточной частоты выполняются в двухканальном УПЧ. В одном канале усиливаются и обрабатываются сигналы верхнего луча, в другом - нижнего.
Каждый из аналогичных каналов имеет два выхода: после амплитудной обработки сигналов и по промежуточной частоте для фазовых детекторов системы СДЦ. На фазовых детекторах выделяются синфазная и квадратурная составляющие.
После СДЦ сигналы поступают в АПОИ, объединяются с сигналами ВРК и далее подаются на аппаратуру отображения и обработки радиолокационной информации. В АС УВД в качестве АПОИ может использоваться экстратор СХ-1000. а в качестве устройств трансляции-модемы СН-2054.
Вторичный радиолокационный канал обеспечивает получение координатной и дополнительной информации от ВС, оборудованных ответчиками в режимах «УВД» или «RBS». Форма сигналов в режиме запроса определяется нормами ИКАО, а при приеме - нормами ИКАО или отечественного канала в зависимости от режима работы ответчиков. Структурная схема и параметры аппаратуры вторичного канала аналогичны автономному ВРЛ типа «Корень-АС».
Похожие работы



... . Ко второму типу относятся РЛС управления объектами по данным радиолокационных измерений, такие как РЛС управления воздушным движением. 2). Анализ задачи и ее формализация Основываясь на требованиях технического задания нам необходимо создать средства постановки помех и помехозащиты для радиолокационной станции управления воздушным движением работающей по трем координатам: дальности, ...
2;fд + Пнс. Найдем эти составляющие. Для приемников импульсных радиосигналов приемника обнаружения: Пс = (1...2) /, где t - длительность принимаемого импульса. Для приемника обзорной РЛС требуется обеспечить обнаружение зондирующих импульсов, тогда в этом случае ширина спектра: где и - длительность принимаемых импульсов. Общая нестабильность частоты и неточность настроек ...
... обзора земли с целью обеспечения возможности автономной навигации по характерным наземным радиолокационным ориентирам. 3. Обоснование, выбор и расчет тактико-технических характеристик радиолокационной станции 3.1. Обоснование, выбор и расчет тактических характеристик РЛС 3.1.1. Максимальная дальность действия RmaxМаксимальная дальность действия задается тактическими требованиями и зависит ...


... " можно возложить непрерывное круглосуточное наблюдение за поверхностью Земли в широком диапазоне частот. Используя их, можно создать информационное поле страны, охватывающее контроль и управление движением воздушного и водного транспорта, поскольку эти машины в состоянии взять на себя функции наземных, воздушных и спутниковых локаторов (совместная информация от них дает полную картину того, что ...
0 комментариев