Выбор активных элементов и расчет их параметров
Распределение избирательности и полосы пропускания между трактами приемника
Характеризует потери на неоптимальную обработку одиночного импульса;
Расчет требуемой чувствительности приемного тракта
Расчет усилителя радиочастоты
Расчет смесителя
Расчет детектора
Навигация
Расчет приемника наземной обзорной РЛС
Расчет приемника наземной обзорной РЛС
46464
знака
0
таблиц
21
изображение
Требуется произвести расчет приемника наземной обзорной РЛС.
Исходные данные задания:
![]()
![]() Рабочая частота приемника.
Рабочая частота приемника.
![]()
![]() Длительность зондирующих импульсов
Длительность зондирующих импульсов
.![]()
![]() Частота повторения импульсов.
Частота повторения импульсов.
![]() Вероятность правильного обнаружения.
Вероятность правильного обнаружения.
![]() Вероятность ложной тревоги.
Вероятность ложной тревоги.
![]() об/мин Темп обзора пространства (об/мин).
об/мин Темп обзора пространства (об/мин).
![]()
![]() Мощность в импульсе.
Мощность в импульсе.
![]() Разрешающая способность канала дальности (в километрах).
Разрешающая способность канала дальности (в километрах).
![]() КНД антенны.
КНД антенны.
![]() Эффективная отражающая поверхность цели (в м2).
Эффективная отражающая поверхность цели (в м2).
![]()
![]() Максимальная дальность до объекта (в км).
Максимальная дальность до объекта (в км).
![]() Относительная нестабильность частоты передатчика.
Относительная нестабильность частоты передатчика.
Относительная нестабильность частоты гетеродина приемника.
![]()
![]() км/с
км/с
Скорость света (в км/с).
![]() км/ч
км/ч
Радиальная скорость самолета в зоне аэропорта (в км/час).
км/с
Радиальная скорость самолета в зоне аэропорта (в км/с).

Постоянная Больцмана.
![]()
Стандартная абсолютная температура.
![]()
К
Тип активных приборов - полевые транзисторы.
Вариант цифровой части - ЦАРП (цифровая автоматическая регулировка порога решения).
СОДЕРЖАНИЕ:
ВВЕДЕНИЕ
1.ВЫБОР СТРУКТУРНОЙ СХЕМЫ И РАСЧЕТ ОСНОВНЫХ ПАРАМЕТРОВ
1.1. Выбор типа схемы приемника
1.2. Расчет требуемой полосы пропускания
1.3. Выбор промежуточной частоты
1.4. Выбор активных элементов и расчет их параметров
1.5. Распределение избирательности и полосы пропускания между трактами приемника
1.6. Расчет требуемой чувствительности приемного тракта
1.7. Расчет коэффициента шума
1.8. Расчет коэффициента усиления приемника до детектора и распределение усиления по трактам
1.9. Выбор схем АРУ, АПЧ
1.10. Составление структурной схемы приемника
2. ЭЛЕКТРИЧЕСКИЙ РАСЧЕТ
2.1. Проектирование антенного переключателя
2.2. Расчет входной цепи
2.3. Расчет усилителя радиочастоты
2.4. Расчет смесителя
2.5. Выбор схемы гетеродина
2.6. Расчет усилителя промежуточной частоты
2.7. Расчет детектора
2.8. Расчет автоматической регулировки усиления
2.9. Расчет АПЧ
2.10. Расчет результирующих характеристик
3. РАСЧЕТ ХАРАКТЕРИСТИК ЦИФРОВОЙ ЧАСТИ ПРИЕМНИКА
4. ЛИТЕРАТУРА
Схема электрическая
Перечень элементов
ВВЕДЕНИЕ
Основной особенностью РЭО летательных аппаратов является то, что оно работает в системе УВД, будучи связано с ней функционально или электрически.
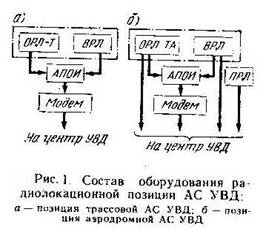
Радиотехнические средства обеспечения полетов системы УВД используются для управления воздушным движением и оказания помощи экипажу при выполнении полетного задания в целях повышения безопасности и регулярности полетов ЛА. Они размещаются в определенных наземных пунктах или на искусственных спутниках Земли (ИСЗ). Наземные средства РЭО - основные информационные датчики системы УВД - состоят из стационарных частей неавтономных радиосистем ближней и дальней навигации (РСБН, РСДН), радиотехнических систем посадки (РСП), автономных радиолокаторов - трассовых (ТРЛ), обзорно-диспетчерских (ОДРЛ), вторичных (ВРЛ), посадочных (ПРЛ), а также радиостанций ДКМВ - и МВ-диапазонов.
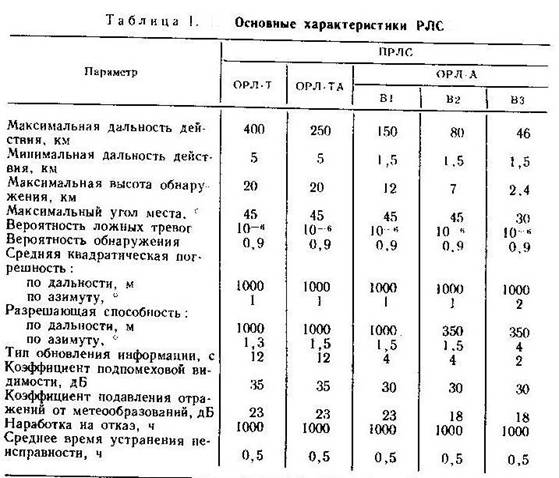
Обзорный радиолокатор аэродромный (ОРЛ-А) предназначен для обнаружения и измерения координат (азимут-дальность) воздушных судов в районе аэродрома с последующей передачей информации о воздушной обстановке в центры (пункты) обслуживания воздушного движения (ОВД) для целей контроля и обеспечения управления воздушным движением.
ОРЛ-А должен быть размещен таким образом, чтобы в секторах ответственности зоны ОВД величины углов закрытия по углу места с высоты фазового центра антенны ОРЛ-А составляли не более 0,50 при работе в автономном режиме.
Основные характеристики ОРЛ-А:
Максимальная дальность действия:не менее 160 км (вариант Б1) или 50-100 км (вариант Б2).
Минимальная дальность действия, не более 2 км (вариант Б1) или 1.5 км (вариант Б2).
Угол обзора в горизонтальной плоскости 3600.
Период обновления информации, не более 6 с.
Диапазон рабочих волн: 23 или 10 см.
Среднеквадратическая ошибка определения координат цели но выходу с АПОИ:
- по дальности, не более 200 м,
- по азимуту, не более 0.40.
Указанные нормативы установлены для вероятности обнаружения не менее 0.8 при вероятности ложной тревоги равной 10-6 по воздушным судам с эффективной отражающей поверхностью, равной 15 м2, при высоте полета воздушного судна 6000 м.
1. ВЫБОР СТРУКТУРНОЙ СХЕМЫ И РАСЧЕТ ОСНОВНЫХ ПАРАМЕТРОВ.
1.1 Выбор типа схемы приемника
Высокие требования к электрическим характеристикам современных профессиональных приемников предопределяют их построение по схеме супергетеродина.
1.2 Расчет требуемой полосы пропускания
Расчет числа преобразований и промежуточных частот начинаем с определения полосы пропускания приемника П. Она зависит от ширины спектра принимаемого сигнала Пс, при которой обеспечивается воспроизведение передаваемых сообщений с допустимыми искажениями, запаса на доплеровское смещение частоты сигнала от подвижного объекта fд, нестабильности и неточности настройки приемника Пнс:
П = Пс + 2 fд + Пнс.
Найдем эти составляющие.
Для приемников импульсных радиосигналов приемника обнаружения:
Пс = (1...2) /,
где t - длительность принимаемого импульса.
Для приемника обзорной РЛС требуется обеспечить обнаружение зондирующих импульсов, тогда в этом случае ширина спектра:

где и - длительность принимаемых импульсов.
Общая нестабильность частоты и неточность настроек:
![]() ,
,
fc и fг - абсолютные нестабильности несущей частоты сигнала и частоты гетеродина,
fн и fп - неточность настроек гетеродина и УПЧ. Обычно принимают![]()
Абсолютные нестабильности частоты сигнала и гетеродина при его нижней настройке и предполагаемой промежуточной частоте: ![]() Гц,
Гц,
А также неточность настройки УПЧ:
![]()
![]()
![]()
Тогда:
![]()
Доплеровское смещение несущей частоты fс сигналов, принимаемых от передатчика, который перемещается относительно приемника с радиальной скоростью vр: fд = fс vр / c ,
где c = 3*105 км/с - скорость распространения радиоволн. Для РЛС, работающей по отраженному сигналу, это смещение удваивается. Тогда:
Найдем требуемую полосу пропускания приемника П:
![]()
Величина полосы пропускания оказалась слишком большой, поэтому используем схему автоподстройки частоты с коэффициентом ![]() . Тогда новое значение полосы пропускания:
. Тогда новое значение полосы пропускания:

1.3 Выбор промежуточной частоты:
Промежуточная частота должна:
быть вне диапазона рабочих частот;
обеспечивать заданное ослабление зеркального канала при простой схеме преселектора;
обеспечивать необходимую полосу пропускания приемника.
Выбор значения промежуточной частоты рекомендуется производить из ряда:
0.115; 0.215; 0.465; 0.5; 0.75; 0.915; 1.2; 1.5; 1.9; 2.2; 4.5; 6.5; 10; 15; 30; 60; 100 МГц.
В технически обоснованных случаях могут быть использованы и другие частоты. При этом промежуточная частота не должна находиться в диапазоне рабочих частот приемника или близко от границ этого диапазона, не должна совпадать с частотой какого-либо мощного передатчика.
Радиолокационные приемники строятся, как правило, по схеме с однократным преобразованием, причем требования к ослаблению побочных каналов обычно невысоки (не более 20 дБ). Промежуточная частота определяется длительностью зондирующего импульса РЛС
fпр = (10 … 20) / .
Номинал fпр выбирается тоже из указанного выше ряда частот. Для уменьшения уровня шумов коэффициент прямоугольности тракта УПЧ приемника РЛС следует выбирать порядка Кпsc = (1.8 … 2), если нет каких-либо дополнительных условий. Таким образом, минимально допустимое значение промежуточной частоты:
Для уменьшения влияния зеркального канала желательно существенно увеличить это значение. Поэтому выбираем ![]() Гц.
Гц.
Похожие работы
... году появились несколько патентов различные РЛС УВД. 1. G01S9/56 342-37 920616 Том 1139 №3 Способ и устройство для системы воспроизведения информации наземной РЛС. Система управления воздушным движением /УВД/ содержит РЛС обнаружения, радиомаяк и общий цифровой кодер для сопровождения самолетов и устранения возможности столкновений. В процессе передачи данных на систему УВД производится ...
... обзора земли с целью обеспечения возможности автономной навигации по характерным наземным радиолокационным ориентирам. 3. Обоснование, выбор и расчет тактико-технических характеристик радиолокационной станции 3.1. Обоснование, выбор и расчет тактических характеристик РЛС 3.1.1. Максимальная дальность действия RmaxМаксимальная дальность действия задается тактическими требованиями и зависит ...

... внедрением автоматизированных систем управления воздушным движением (АС УВД), использованием последних достижений вычислительной техники, более современных радиоэлектронных средств управления воздушным движением, навигации, посадки и связи, совершенствованием методов и средств технической эксплуатации авиационной техники. Аналитический обзор аэродромных РЛС Аэродромные обзорные РЛС (ОРЛ-А) ...



... , работающих на частоте, близкой к частоте РЛС и др. Мы далее будем рассматривать только организованные (умышленные) помехи, создаваемые специально для подавления работы радиолокационных станций. Организованные помехи делятся на пассивные, создаваемые отражателями, и активные, излучаемые специальной аппаратурой. Пассивные помехи Применение пассивных помех основано на явлении отражения, или ...
0 комментариев