Навигация
Проектирование принципиальной схемы стенда для исследования свойств позиционного регулятора
21073
знака
1
таблица
8
изображений
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Федеральное государственное образовательное учреждение среднего профессионального образования
«Омский химико-механический колледж»
Специальность: 220301 Автоматизация технологических процессов и производств
Курсовая работа
по автоматическому управлению
Тема: Проектирование принципиальной схемы стенда для исследования свойств позиционного регулятора
студент Колесников Константин Андреевич
группы А- 317
Руководитель Григорьева Л.В.
СОДЕРЖАНИЕ
Введение
1. Исследование свойств объекта проектирования
2. Проектирование принципиальной схемы стенда
3. Методика выполнения лабораторной работы
4. Расчет надежности проектируемого стенда
Вывод
Литература и нормативно- техническая документация
ВВЕДЕНИЕ
Позиционные регуляторы предназначены для позиционного регулирования, а также они могут применяться в качестве сигнализации крайних значений регулирующего параметра. Регулирующий параметр может быть любым (температура, давление, расход и т.д.)
Позиционные регуляторы реализуют принцип «включено-выключено»
Позиционные регуляторы не сложны по конструкции, надёжны в работе, просты в обслуживании и настройке.
Их применяют на инерционных объектах с малым запаздыванием. Примеры позиционных регуляторов: ПР 1.5; КВД 1; ПР 1.6-М1; Х-2; МРЩПр-54
Внедрение автоматических устройств в нефти – химическое производство ведет к сокращению брака и отходов, уменьшению затрат сырья и энергии, также ведет к повышению производительности труда, улучшению качества выпускаемой продукции.
1. ИСЛЕДОВАНИЕ СВОЙСТВ ОБЪЕКТА ПРОЕКТИРОВАНИЯ
Позиционный регулятор - такой автоматический регулятор, у которого регулирующий орган может занимать ограниченное число определённых положений. Позиционные (Пз) регуляторы относятся к группе регуляторов прерывистого действия. Чаще всего применяются двух- или трёхпозиционные регуляторы.
Классификация:
1) По виду регулируемого параметра:
- давления
- уровня
- расхода
2) По режиму работы:
- непрерывного действия
- прерывистого действия
3) По конструкции:
- приборные
- аппаратные
- агрегатные
4) По способу действия:
- прямого действия
- косвенного действия
5) По виду используемой энергии:
- электрические
- пневматические
- гидравлические
- комбинированные
6) По закону:
- пропорциональные ( П )
- интегральные ( И )
- пропорционально- интегральные ( ПИ)
- пропорционально- дифференциальные ( ПД )
- пропорционально- интегрально- дифференциальные ( ПИД )
Рассмотрим несколько примеров позиционных регуляторов:
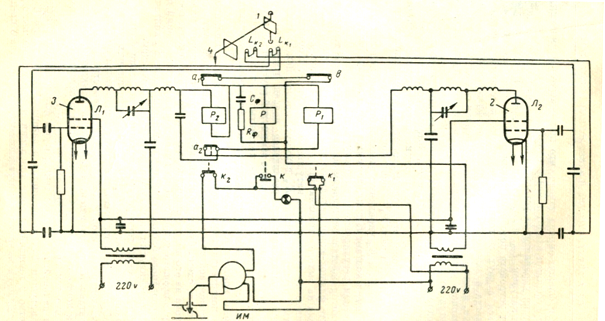
Рис. 1 Схема трехпозиционного регулятора МРЩПр-54
Регуляторы МРЩПр-54 предназначены для позиционного регулирования и сигнализации предельных значений температуры и подразделяются на двух- и трехпозиционные.
Регулятор состоит из измерительной части 1, двух электронных управляющих устройств 2 и 3, выполняемых на лампах Л1 и Л2, трех электромагнитных реле Р, Р1 и Р2 с контактами и исполнительного механизма ИМ.
Измерительной частью прибора является магнитоэлектрический милливольтметр с присоединенной к нему термопарой, установленной в объекте регулирования.
Каждое из управляющих устройств представляет собой одноламповый генератор высокой частоты. Катушки индуктивности Lн1 и Lн2 сеточных контуров генераторов расположены за шкалой прибора на подвижных кронштейнах и могут устанавливаться вручную во всем диапазоне шкалы около заданного значения температуры. Положение катушек можно определить при помощи двух стрелок индексов, вынесенных на шкалу прибора. Взаимное расположение катушек и флажка-экрана таково, что при повороте рамки милливольтметра флажок входит в зазор одной из катушек. Действие управляющих устройств основано на изменении индуктивности катушек Lк1 и Lк2 сеточных контуров. Параметры управляющих устройств подобраны таким образом, что последние могут находиться в двух состояниях: генерации колебаний высокой частоты, когда в зазоре катушки находится флажок-экран, и срыва генерации, когда флажок вне зазора. В первом случае ток на выходе управляющего устройства равен 5 ма. Во втором случае сила тока повышается до 25 ма.
Выходной ток управляющих устройств поступает в катушки электромагнитных реле Р, Р1 и Р2, которые составляют релейный блок прибора. Каждое реле снабжено парой ртутных контактов (К, К1 и К2). Кроме того, реле Р2 имеет два нормально замкнутых контакта а1 и а2, а реле Р1г — один контакт b.
Контакты К1 и К2 управляют электромоторным исполнительным механизмом, а контакт К включает сигнальную лампу при нормаль-лом значении регулируемой температуры.
Регулятор работает следующим образом. При низкой температуре в объекте флажок-экран находится вне зазоров катушек Lк1 и Lк2.Сила тока на выходе управляющих устройств — 25 ма. Возбуждены включенные последовательно катушки реле Р% и Р. Нормально разомкнутый ртутный контакт К2 замкнут, привод исполнительного механизма срабатывает на увеличение подачи греющего агента в объект регулирования. Нормально замкнутый ртутный контакт К — разомкнут. Нормально замкнутые контакты а1 и а2 разомкнуты. Катушка реле Р1 обесточена вследствие размыкания контакта а2, и ртутный контакт Кг разомкнут.
При повышении температуры и повороте стрелки милливольтметра флажок войдет в зазор катушки Lк2. Управляющее устройство правой части схемы будет работать, как генератор высокой частоты, и сила тока на его выходе снизится до 5 ма. Но это изменение состояния управляющего устройства не вызовет никаких изменений в состоянии релейного блока, так как управляемый реле Р2 контакт а2 остается разомкнутым, а катушка реле Р1 обесточенной.
При достижении температурой заданного значения флажок войдет в зазоры обеих катушек Lк1 и Lк2. Оба управляющих устройства самовозбуждаются и их выходные токи уменьшаются до 5 ма. Сердечники электромагнитов Р и Р2 отпустят поворотные якоря. Ртутный контакт К 2 разомкнется, а контакт К замкнется. Замкнутся также и контакты а1 и а2- Сигнальная лампа загорается, оповещая о том, что температура нормальная.
При дальнейшем подъеме температуры флажок-экран выйдет из зазора катушки LК2, но останется в зазоре LКг В управляющем устройстве 2 произойдет срыв генерации и увеличение выходного тока до 25 ма, в то время как в управляющем устройстве 3 по-прежнему будут генерироваться колебания высокой частоты и выходной ток будет иметь силу около 5 ма. Катушка реле Р1 окажется возбужденной, а ртутный контакт К г замкнутым. Электромоторный привод сработает на уменьшение подачи греющего агента в объект регулирования. Одновременно с замыканием контакта Кг произойдет размыкание контакта b, шунтирующего катушку реле Р, которая оказывается соединенной последовательно с катушкой реле Р1, и ртутный контакт К разомкнется. Сигнальная лампа, показывающая нормальную температуру, погаснет.
Возможность выхода флажка из катушки в направлении повышения температуры исключена благодаря специальному ограничителю хода стрелки милливольтметра. [1, с333]
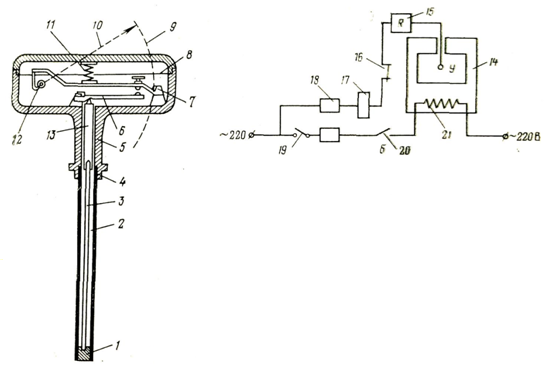
Рис. 2 Двухпозиционный регулятор: дилатометрический термометр с контактной системой
1, а). Термометр состоит из трубки 2, изготовленной из металла с большим коэффициентом линейного расширения (медь, латунь, алюминий, сталь) и стержня 3, изготовленного из материала с малым коэффициентом линейного расширения (кварц, фарфор, инвар). Стержень 3 опирается на пробку в трубке 2, которая ввернута в головку 5. В последней помещен рычажный передаточный механизм 6, 7, 8 и 12, снабженный электрическими контактами. Термометр при помощи ниппеля 4 ввинчивается в бобышку, укрепленную в нагревательной печи 14
Вместе с ним перемещаются вниз концы рычагов 6 и 7. Движение далее передается стрелке 10, которая указывает на шкале 9 температуру в градусах.
При перемещении рычага 7 вниз контакт между ним и рычагом 8 контакта 16 на рис. 10.1,6 размыкается. При этом обесточивается катушка 17 контактора, что обеспечивает размыкание контакта 20 и отключение нагревателя 21. При понижении температуры в печи трубка 2 укорачивается, что вызывает замыкание контактов между рычагами 7 и 8 и в конечном итоге включение электронагревателя 21 печи 14 (рис. 10.1,6).
Установка заданного значения регулируемой величины (температуры) производится изменением жесткости пружины 11.
В реальных двухпозиционных регуляторах изменение выходного сигнала от минимального до максимального значения и наоборот происходит при различных значениях входной величины. Разность между значениями входной величины в моменты изменения выходного сигнала называют зоной нечувствительности регулятора. Минимальная величина зоны нечувствительности зависит от зазоров и сил трения, а также обусловлена необходимостью создания определенных усилий для размыкания электрических контактов. [2, с175]
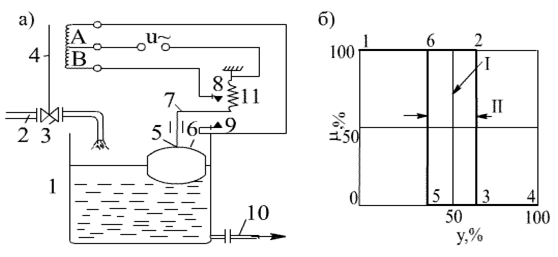
Рис. 3. Принципиальная схема (а) и статическая характеристика (б) Пз регулятора уровня
Принцип действия Пз регулятора следующий. Например, в объекте управления – бак 1 по трубе 2 подается жидкость, а по трубе 10 она расходуется потребителем (рис.3, а).
Чувствительный элемент регулятора – поплавок 6 измеряет уровень в баке; текущее значение уровня определяется положением штока 5 и жестко с ним соединенного рычага – контакта 7, который через пружину 11 соединен с источником питания напряжением U. Заданные значения верхнего и нижнего уровней определяются положением передвижных упоров – контактов 8 и 9, устанавливаемых вручную.
При подъеме уровня выше заданного контакта 7 замкнется с контактом 8 и под напряжением окажется обмотка Б тягового электромагнита, благодаря чему сердечник 4 мгновенно переместится вверх, что приведут к закрытию регулирующего органа 3 (клапана). При понижении уровня ниже заданного контакт 7 замкнется с контактом 9, под напряжением окажется обмотка А тягового электромагнита, якорь 4 переместится вниз, что приведет к открытию регулирующего органа. Приведенная схема является примером двухпозиционного регулирования.
Уравнения регулятора:
m=0 при Dy> 0 и m =1 при D y< 0.
Из статической характеристики двухпозиционного регулятора (рис.3,б) видно, что повышение уровня в баке соответствует перемещению по точкам 1,2,3,4; точки 2 и 3 соответствуют мгновенному перемещению регулирующего органа из положения “открыто” в положение “закрыто”, когда замкнутся контакты 7 и 8. Понижение уровня соответствует перемещению по точкам 4,5,6,1 статической характеристики. [3, с237]
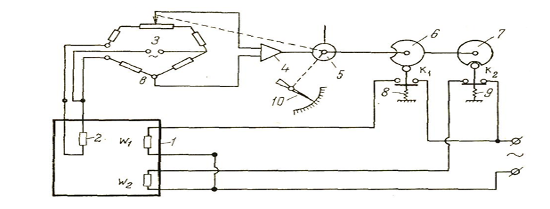
Рис. 4 Схема двухпозиционного регулятора температуры
Объект регулирования 1 представляет собой сушильную камеру с электрообогревом, причем система обогрева устроена так, что, если температура станет ниже допустимой, то должна включаться обмотка обогрева w1 большой мощности, а если температура стала выше допустимой, то вместо обмотки w1 должна включиться обмотка обогрева w2 малой мощности, вследствие чего резкого снижения температуры не произойдет.
В качестве чувствительного элемента применяется электрический термометр сопротивления 2 который подключен к электронному автоматическому мосту 3 по трехпроводной схеме. Если температура в сушильной камере изменится, изменится сопротивление термометра и в диагонали a—b моста появится сигнал небаланса. Усиленный электронным усилителем 4 сигнал приводит во вращение ротор реверсивного двигателя 5; направление вращения зависит от знака небаланса, т. е. от того, повысилась или понизилась температура. С ротором реверсивного двигателя кинематически связаны диски б и 7, положение которых зависит от угла поворота ротора, а следовательно, от положения движка а реохорда и показывающей стрелки 10 моста. К профилю дисков с помощью пружин 8 и 9 прижаты ролики направляющих контактов k1 и k2.
Диски 6 и 7 имеют вид профилированных кулачков со впадинами. При их вращении контактная группа k1 замкнута в интервале показаний прибора от начала шкалы до впадины диска 6 и разомкнута в интервале от впадины до максимума шкалы. Контактная группа k2, наоборот, разомкнута в интервале показаний прибора от начала шкалы до впадины диска 7 и замкнута в интервале от впадины до максимума шкалы.
Настройка регулятора на заданное значение температуры в сушильной камере осуществляется вручную установкой впадины диска 6 на нижний предел регулирования, а впадины диска 7 на верхний предел регулирования (для этого диски снабжены специальной шкалой). [4, с223]
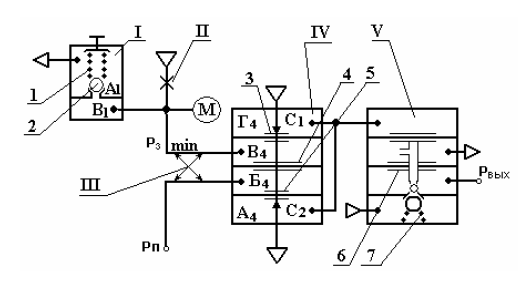
Рис. 5 Принципиальная схема регулятора ПР 1.5-М1
Принцип действия основан на сравнении двух давлений Р3 и Рп.
Задатчик I и постоянный дроссель II предназначены для изменения давления в камере задания элемента сравнения IV. Задатчик I имеет пружину 1 и шариковый клапан 2, через который воздух из камеры В1 сбрасывается в камеру А1 и далее в атмосферу. Вращая ручку задатчика и изменяя усилие натяжения пружины 1, можно настраивать его выходное давление в пределах 0,02…0,14 МПа. Для контроля заданного значения параметра служит манометр М.
Настройка работы регулятора "на минимум" или "на максимум" выполняется поворотом диска III.
При настройке регулятора "на максимум" текущее значение измеряемого параметра в виде давления сжатого воздуха РП поступает в камеру В4 элемента сравнения IV. Заданное давление РЗ, установленное задатчиком I, подводится к камере Б4 элемента IV.
При работе регулятора "на минимум" заданное давление РЗ подается в камеру В4, а давление от измерительного блока РП – в камеру Б4. Сравнение происходит в трехмембранном элементе сравнения IV (пневматическом усилителе давления), который состоит из двух пневматических сопротивлений типа "сопло-заслонка" (сопла С1, С2 и шток мембранного блока) и мембранного блока, образующего вместе с корпусом глухие камеры. Мембранный блок содержит три эластичные мембраны, соединенные общим штоком, торцы которого и служат заслонками сопл.
Мембранный блок может перемещаться в вертикальном направлении. Его движение останавливается, когда торец штока упирается в сопло. Эффективные площади мембран 3, 5 равны друг другу и значительно меньше эффективной площади мембраны 4. Камеры А4 и Г4, в которых располагаются сопла, соединяются последовательно и образуют тем самым проточную камеру с двумя управляемыми пневматическими сопротивлениями. К соплу С1 подводится давление питания РПИТ, сопло С2 сообщается с атмосферой.
Усилитель мощности предназначен для повторения входного сигнала и усиления его по мощности (расходу воздуха). Усилители применяются в качестве выходных элементов в большинстве приборов, построенных из элементов УСЭППА.
В связи с тем, что в таком усилителе мембранный блок собран из грубых (менее чувствительных) мембран и не разгружен от действия посторонних усилий, повторение сигнала осуществляется со значительной статической ошибкой (до 5 % от стандартного диапазона пневматических сигналов). В то же время большие проходные сечения шариковых клапанов обеспечивают усилителю высокие динамические свойства. [5]
В данном разделе были рассмотрены позиционные регуляторы: МРЩПр-54; Двухпозиционный регулятор: дилатометрический термометр с контактной системой; Позиционный регулятор уровня; Двухпозиционный регулятор температуры; ПР 1.5-М1.
Похожие работы
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
... специалисты ОАО «ХХХ» приступили к проектированию и разработке АСКиУ процесса терможелатинизации фильтроэлементов воздушных для двигателей КАМАЗ. 4.5 Разработка плана мероприятий по улучшению системы менеджмента качества ОАО «ХХХ» применительно к производству фильтроэлементов воздушных для двигателей КАМАЗ Одной из главных особенностей стандартов ИСО серии 9000:2000 является формулирование ...
... мероприятия по обеспечению однородности выпускаемой продукции. Все эти мероприятия можно объединить в четыре группы: 1. совершенствование технологии производства; 2. автоматизация производства; 3. технологические (тренировочные) прогоны; 4. статистическое регулирование качества продукции. 2.10. Проектирование технологических процессов с использованием средств ...
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...
0 комментариев