Навигация
Выбор элементов принципиальной схемы
67510
знаков
8
таблиц
5
изображений
2.4 Выбор элементов принципиальной схемы
Основным элементом устройства управления моментом зажигания является микроконтроллер. Применение микроконтроллера повышает уровень интеграции и надежность устройства. Так же это дает возможность изменять характеристики момента искрообразования.
Сейчас на рынке предлагается множество микроконтроллеров различных производителей. Самыми распространенными семействами микроконтроллеров являются AVR фирмы “Atmel” и PIC фирмы “MicroChip”.
Сравнительный анализ AVR и PIC микроконтроллеров.
AVR – микроконтроллер фирмы “Atmel” – это 8 – разрядные микроконтроллеры с базовой RISC архитектурой. Они привлекают внимание разработчиков наилучшим соотношением быстродействия и энергопотребления. В продаже имеется более 15 типов микроконтроллеров. AVR – контроллеры имеют 89 – 133 инструкции, большинство из которых выполняется за один период тактовой частоты. AVR – контроллеры имеют 32 8 – битных регистра общего назначения. Максимальная частота микроконтроллеров достигает 16 МГц, в основном же колеблется от 8 до 10 МГц. Большое количество инструкций сильно усложняет обучение программированию и само программирование микроконтроллеров, что является существенным недостатком AVR – контроллеров при взгляде со стороны пользователя.
Микроконтроллеры PIC это простые и высокопроизводительные микроконтроллеры с базовой RISC – архитектурой. Несомненное достоинство семейства – минимальное число команд – от 33, большинство из которых выполняется за 4 такта работы процессора. Тактовая частота микроконтроллеров колеблется от 10 до 40 МГц. Общие особенности PIC – контроллеров: внутренний сброс по включению питания, наличие сторожевого таймера, защита памяти программ от несанкционированного считывания, мощные линии ввода – вывода (до 25 мА), возможность внутрисхемного программирования.
Большее количество тактов, затрачиваемых на выполнение одной команды, в достатке компенсируется большими тактовыми частотами PIC – контроллеров. Несомненными достоинствами этих микроконтроллеров являются небольшое количество команд и мощные линии ввода – вывода. Поэтому выбор останавливается на PIC – микроконтроллерах.
Выбор микроконтроллера из семейства PIC контроллеров.
Для сравнения берется три основных семейства PIC – контроллеров: PIC12Cxxx, PIC16F84x и PIC18Fxx.
Микроконтроллеры PIC12Cxxx имеют следующие технические характеристики:
1. Напряжение питания 2,5В.
2. 6(5) линий ввода – вывода.
3. Наличие АЦП в кристаллах PIC12C6xx.
4. Повышенная длина команд (до 14 бит).
5. Тактовая частота – до 10 МГц.
6. Низкая стоимость.
Микроконтроллеры PIC16F84x имеют следующие технические характеристики:
1. Наличие Flash – памяти программ.
2. Отсутствие АЦП.
3. Тактовая частота – до 20 МГц.
4. 13 линий ввода – вывода.
5. Напряжение питания – от 4 до 6В.
6. Небольшая стоимость.
Микроконтроллеры PIC18Fxxx имеют следующие технические характеристики:
1. Расширенное ядро RISC.
2. Наличие Flash – памяти программ.
3. Тактовая частота – до 40 МГц.
4. До 34 линий ввода – вывода.
5. Наличие АЦП либо ЦАП.
6. Высокая стоимость.
Исходя из данного сравнения, оптимальным семейством микроконтроллеров является семейство PIC16F84x, так как несомненными плюсами являются: наличие Flash – памяти, отсутствие ЦАП и АЦП, большое количество линий ввода – вывода, небольшая стоимость. Из всего семейства, оптимальным для бесконтактной системы зажигания является микроконтроллер PIC16F844I/P (рис. 2.5). Здесь PIC16F84 марка микроконтроллера, 4 тактовая частота микроконтроллера, I индустриальный диапазон рабочих температур (от –40 до +85 градусов Цельсия), P корпус PDIP для монтажа в отверстия.

Рисунок 2.6 Условное обозначение микроконтроллера.
Таблица 1 назначение выводов микроконтроллера PIC16F844I/P.
| Обозначение | № | Тип (I/O/P) | Тип буфера | Назначение |
| OSC1/CLKIN | 16 | I | ST/CMOS | Вход для подключения кварцевого резонатора, либо RC – цепи, либо вход для внешнего тактового генератора. |
| OSC2/CLKOUT | 15 | O | Выход для подключения кварцевого резонатора в режиме в режиме работы с кварцем, в режиме RC – генератора на выходе присутствуют импульсы с частотой 1/4 от OSC1 | |
| MCLR | 4 | I/P | ST | Сброс по низкому уровню но входе. При программировании кристалла – вход напряжения программирования. |
| RA0 RA1 RA2 RA3 RA4/T0CKI | 17 18 1 2 3 | I/O I/O I/O I/O I/O | TTL TTL TTL TTL ST | Выводы двунаправленного порта А RA4/T0CKI может быть настроен как вход импульсов для таймера – счетчика TMR0. Выход с открытым стоком. |
| RB0/INT RB1 RB2 RB3 RB4 RB5 RB6 RB7 | 6 7 8 9 10 11 12 13 | I/O I/O I/O I/O I/O I/O I/O I/O | TTL/ST TTL TTL TTL TTL TTL TTL/ST TTL/ST | Выводы двунаправленного порта В. К выводам порта могут быть программно подключены внутренние подтягивающие резисторы Vdd. RB0/INT может быть также программно настроен как вход внешнего прерывания RB4 – RB7 могут быть также программно настроены как входы прерывания по изменению уровня на на любом из этих входов. Направление изменения задается программно. При программировании кристалла RB6 используется как тактовый, RB7 как вход/выход данных. |
| Vss | 5 | P | Общий провод. | |
| Vdd | 14 | P | Положительное напряжение питания |
Обозначения. I – вход, O – выход, I/O вход/выход, P – вывод питания, TTL – стандартный TTL вход, ST – вход с триггером Шмидта.
Таблица 2. Система команд микроконтроллера PIC16F844I/P.
| Команда. | Описание команды. |
| ADDWF f, d | Сложение W и f |
| ANDWF f, d | Выполняется побитное “И” содержимого регистров W и f. Если d=0, результат сохраняется в регистре W. Если d=1, результат сохраняется в регистре f. |
| CLRF f | Очистить содержимое регистра f и установить флаг Z. |
| CLRW | Очистить содержимое регистра W и установить флаг Z. |
| COMF f, d | Инвертировать все биты в регистре f. Если d=0, результат сохраняется в регистре W. Если d=1, результат сохраняется в регистре f. |
| DECF f, d | Декремент содержимого регистра f. Если d=0, результат сохраняется в регистре W. Если d=1, результат сохраняется в регистре f. |
| DECFSZ f, d | Вычесть 1 из f и пропустить если 0. Декремент содержимого регистра f с пропуском, если 0. Если d=0, результат сохраняется в регистре W. Если d=1, результат сохраняется в регистре f. Если результат не равен 0 – исполняется следующая инструкция. Если результат = 0, то следующая инструкция не выполняется (пропускается, вместо нее выполняется “виртуальный” NOP), а команда выполняется за 2 цикла. |
| INCF f, d | Прибавить 1 к f. Инкремент содержимого регистра f. Если d=0, результат сохраняется в регистре W. Если d=1, результат сохраняется в регистре f. |
| INCFSZ f, d | Прибавить 1 к f и пропустить если 0. Инкремент содержимого регистра f с пропуском, если 0. Если d=0, результат сохраняется в регистре W. Если d=1, результат сохраняется в регистре f. Если результат не равен 0 – исполняется следующая инструкция. Если результат = 0, то следующая инструкция не выполняется (пропускается, вместо нее выполняется “виртуальный” NOP), а команда выполняется за 2 цикла. |
| IORWF f,d | Побитное “ИЛИ” содержимого регистров W и f. Если d=0 – результат сохраняется в регистре W. Если d=1 – результат сохраняется в регистре f. |
| MOVF f,d | Содержимое регистра f пересылается в регистр адресата. Если d=0 – значение сохраняется в регистре W. Если d=1 – значение сохраняется в регистре f. d=1 используется для проверки содержимого f на ноль. |
| MOVWF f | Переслать содержимое W в f. |
| NOP | Нет операции. |
| RLF f, d | Выполняется циклический сдвиг влево содержимого регистра f через бит C регистра STATUS (через перенос). Если d=0 – результат сохраняется в регистре W. Если d=1 – результат сохраняется в регистре f. |
| RRF f, d | Выполняется циклический сдвиг вправо содержимого регистра f через бит C регистра STATUS (через перенос). Если d=0 – результат сохраняется в регистре W. Если d=1 – результат сохраняется в регистре f. |
| SUBWF f, d | Вычетание содержимого регистра W из регистра f. Если d=0 – результат сохраняется в регистре W. Если d=1 – результат сохраняется в регистре f. |
| SWAPF f, d | Поменять местами старший и младший полубайты регистра f. Если d=0 – результат сохраняется в регистре W. Если d=1 – результат сохраняется в регистре f. |
| XORWF f, d | Сравнение содержимого регистров W и f (проверка на “одинаковость”). Побитное “Исключающее “ИЛИ” содержимого регистров W и f. Если d=0 – результат сохраняется в регистре W. Если d=1 – результат сохраняется в регистре f. |
| BCF f, b | Установить в 0 бит b регистра f. |
| BSF f, bf | Установить в 1 бит b регистра f |
| BTFSC f, b | Проверить бит b в регистре f. Если бит b в регистре f =1, то исполняется следующая инструкция. Если бит b в регистре f =0, то следующая инструкция не выполняется (пропускается, вместо нее выполняется “виртуальный” NOP), а команда выполняется за 2 цикла. |
| BTFSS f, b | Проверить бит b в регистре f. Если бит b в регистре f=0, исполняется следующая инструкция. Если бит b в регистре f=1, то следующая инструкция не выполняется (пропускается, вместо нее выполняется “виртуальный” NOP), а команда выполняется за 2 цикла. |
| ADDLW k | Содержимое регистра W складывается с 8 – разрядной константой k. Результат сохраняется в регистре W. |
| SUBLW k | Вычесть содержимое регистра W из 8 – разрядной константы k. Результат сохраняется в регистре W. |
| MOVLW k | Переслать константу k в регистр W. В неиспользуемых битах ассемблер устанавливает 0. |
| ANDLW k | Выполняется побитное “И” содержимого регистра W и 8 – разрядной константы k. Результат сохраняется в регистре W. |
| IORLW k | Выполняется побитное “ИЛИ” содержимого регистра W и 8 – разрядной константы k. Результат сохраняется в регистре W. |
| XORLW k | Сравнение содержимого регистра W и константы (проверка на “одинаковость”). Выполняется побитное “Исключающее ИЛИ” содержимого регистра W и 8 – разрядной константы k. Результат сохраняется в регистре W. |
| CALL | Выполнить условный переход (переход по стеку). Адрес следующей инструкции (PC+1) “загружается” в вершину стека (TOS). 11 бит адреса “загружаются” из кода команды в счетчик команд PC<10:0>. 2 старших бита “загружаются” в счетчик команд PC<12:11> из регистра PCLATH. |
| GOTO k | Выполнить безусловный переход (стек не задействован). 11 бит адреса “загружаются” из кода команды в счетчик команд PC<10:0>. 2 старших бита “загружаются” в счетчик команд PC<12:11> из регистра PCLATH. |
| RETURN | Возврат из подпрограммы (по стеку). Вершина стека (TOS) “выгружается” в счетчик команд PC. |
| RETLW k | Возврат из подпрограммы (по стеку). В регистр W загружается 8разрядная константа. Вершина стека (TOS) “выгружается” в счетчик команд PC. |
| RETFIE | Возврат из подпрограммы обработки прерываний (по стеку). Вершина стека (TOS) загружается в счетчик команд PC. Осуществляется предварительное разрешение прерываний (бит №7 регистра INTCON {GIE} устанавливается в 1). |
| CLRWDT | Сброс WDT и предделителя (если он подключен к WDT). В регистре STATUS, биты (TO) и (PD) устанавливаются в 1. Коэффициент деления предделителя (если он подключен к WDT) не меняется. |
| SLEEP | Переход в “спящий режим”. Сброс флага включения питания (PD) в 0. Установка флага переполнения WDT (TO) в 1. Сброс WDT и его предделителя. Перевод микроконтроллера в режим SLEEP и выключение тактового генератора. |
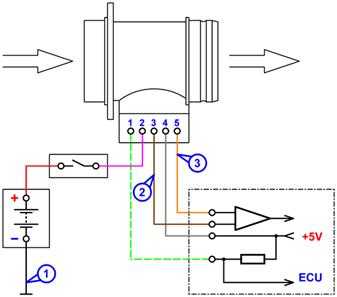
В данной системе применяется датчик Холла марки Honeywell 2AV50A (2AV54). Он специально предназначен для бесконтактных систем зажигания. Диапазон рабочих температур датчика от –40 до +150 градусов Цельсия. Разброс напряжения питания от 4,5 до 16В. Так же датчик имеет кронштейны, позволяющие надежно закрепить его.
Основным параметром, на который нужно ссылаться при выборе остальных элементов схемы, является их масса, так как устройство будет эксплуатироваться в условиях повышенной вибрации, и массивные элементы будут моментально срезаны.
При выборе резисторов R1 (10 КОм.), R2 (100 КОм.), R3 (200 Ом.), R4 (2,2 КОм.) предпочтение отдается импортным углеродистым резисторам типа CF. Они отличаются высокой надежностью и стабильностью параметров, а так же малыми габаритами и массой. Диапазон рабочих температур от –55 до +125 градусов Цельсия. При работе с микроконтроллером мощность резисторов может быть 0,125 Вт или меньше.
При выборе конденсатора С1 (0,1 мкФ.) предпочтение отдается импортным дисковым керамическим конденсаторам серии NP0, так как они обладают высокой стабильностью при изменении температуры. Диапазон рабочих температур – от –20 до +85 градусов Цельсия. Номинальное напряжение – 50В.
Диод VD1 должен быть мощным, поэтому выбор останавливаем на Д 247. Он предназначен для преобразования переменного напряжения частотой до 1,1 кГц. Средний прямой ток – 10А. Средний прямой ток перегрузки в течение 0,5 с. – 30 А. При выборе конденсаторов С2 (47 мкФ.), С3 (1мкФ.) предпочтение отдается импортным электролитическим конденсаторам серии LL, так как они плотно монтируются на плату и, соответственно, менее подвержены вибрациям. Диапазон рабочих температур – от 40 до +85 градусов Цельсия. Максимально допустимое значение переменного тока, проходящего через конденсатор – 116 мА. Рабочее напряжение – 16В.
Резонатор ZQ1 стоит выбирать керамический. Обычно он трехвыводной и имеет встроенные емкости. Такой резонатор лучше переносит вибрацию.
Похожие работы



... значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками: Вариант ...

... Вести учет выполненных работ; · Сохранение информации в базе данных для выбранного клиента; · Печать отчетов о проделанной работе и найденных неисправностях. Диагностический комплекс Мотор-Тестер МТ10 позволяет осуществлять мониторинг следующих параметров: Контролируемые параметры Диапазон Осциллографический канал 1: входное напряжение: ±200 В входное сопротивление: 240 кОм ...
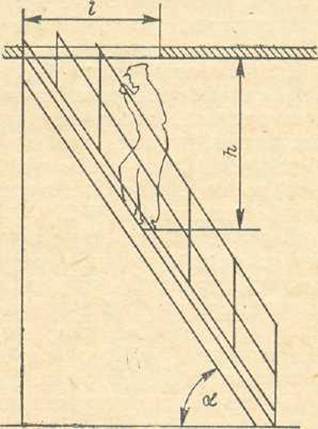
... трапа (но не менее 600 мм); для вертикальных трапов—600 мм. Между площадками и трапами нельзя делать порогов, а также размещать в пределах площадок какие-либо предметы (рымы, органы управления системами, оборудованием), о которые можно споткнуться. Над площадками и маршами наклонных трапов по всей их длине и ширине в пределах высоты двух метров не допускается располагать какое-либо оборудование, ...
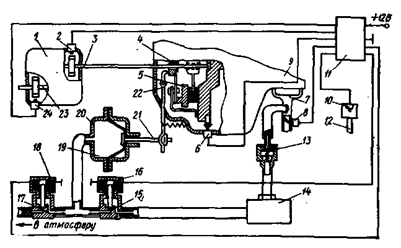
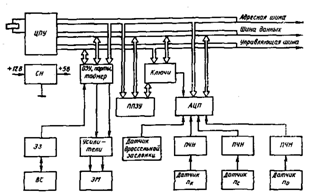
... , а при открытии клапана 17, наоборот, уменьшается. Когда оба клапана закрыты, разрежение в полости 19 остается неизменным. Рисунок 4. Структурная схема микропроцессорной системы управления сцеплением В зависимости от разрежения в полости 19. сервокамеры меняется положение ее штока 21, и соответственно регулируется момент Мс, передаваемый сцеплением. Из рассмотрения зависимости Мс от ...
0 комментариев