Навигация
Система управления механизмом зажигания
67510
знаков
8
таблиц
5
изображений
Аннотация
Быков С.К. Система управления механизмом зажигания. – Челябинск, ЧЭнК, 2006, с.75, илл.6. Библиографической литературы – 8 наименований. 3 листа чертежей формата А1, 7 листов карт технологического процесса.
В данном дипломном проекте проводится разработка системы управления механизмом зажигания. В общей части рассматриваются принципы построения систем управления на микроконтроллерах.
В специальной части приведены разработка структурной и принципиальной схемы устройства, анализ семейств микроконтроллеров, разработка программного обеспечения для микроконтроллера и выполнен расчет надежности устройства.
В разделе организация производства представлены виды технической документации, необходимые при производстве радиоэлектронной аппаратуры и маршрутная карта технологического процесса на производство печатных плат.
В экономической части выполнен расчет себестоимости производства проектируемого устройства и проведен анализ потребительского спроса на рынке.
В разделе техники безопасности перечислены правила техники безопасности, соблюдение которых необходимо при проведении электромонтажных работ.
Содержание
Введение
1. Системы управления на микроконтроллерах
1.1 Применение микроконтроллеров в современной промышленности
1.2 Принципы построения систем управления на микроконтроллерах
2. Разработка системы управления механизмом зажигания
2.1 Постановка задачи
2.2 Разработка структурной схемы
2.3 Разработка принципиальной схемы
2.4 Выбор элементов принципиальной схемы
2.5 Разработка программного обеспечения
2.6 Расчет надежности
3. Организация производства
3.1 Виды конструкторско технологической документации при производстве электронных устройств
3.2 Маршрутная карта технологического процесса при изготовлении печатной платы
4. Экономическая часть
4.1 Расчет себестоимости изготовления устройства
5. Мероприятия по технике безопасности и противопожарной технике
5.1 Меры безопасности при производстве электромонтажных работ
Заключение
Список литературы
Приложение А Текст программы микроконтроллера
Микропроцессорные технологии уже давно вышли за рамки персональных компьютеров и суперЭВМ. Во всем мире широкое распространение получили микроконтроллеры, как в автоматизированных системах управления, так и в бытовых электроприборах, так как они отличаются надежностью, высокой степенью интеграции и небольшой стоимостью.
В данном дипломном проекте я планирую рассмотреть возможность применения микроконтроллеров в системах зажигания двигателей внутреннего сгорания. А так же описать этапы разработки этой системы зажигания и привести необходимую документацию для организации производства устройства, либо его изготовления в условиях малого предприятия.
1. Системы управления на микроконтроллерах
1.1 Применение микроконтроллеров в современной промышленности
Микроконтроллеры являются наиболее массовыми представителями микропроцессорной электроники. Интегрируя в одном корпусе микросхемы высокопроизводительный процессор, оперативную и постоянную память, а также набор периферийных устройств, микроконтроллеры позволяют с минимальными затратами реализовать широкую номенклатуру систем управления различными объектами и процессами.
Структурная организация, набор команд и аппаратурнопрограммные средства ввода/вывода информации микроконтроллеров лучше всего приспособлены для решения задач управления и регулирования в приборах, устройствах и системах автоматики, а не для решения задач обработки данных. Микроконтроллеры не являются классическими электронно – вычислительными машинами, так как физическая и логическая разделённость памяти программ и памяти данных исключает возможность модификации или замены (перезагрузки) прикладных программ микроконтроллеров во время работы, что сильно затрудняет их использование в качестве универсальных средств обработки данных.
Поэтому микроконтроллеры находят широкое применение в промышленной автоматике, контрольно измерительной технике, аппаратуре связи, бытовой технике и многих других областях человеческой деятельности.
1.2 Принципы построения систем управления на микроконтроллерах
В устройствах управления объектами (контроллерах) на основе микроконтроллеров аппаратурные средства и программное обеспечение существуют в форме неделимого аппаратурно программного комплекса. При проектировании контроллеров приходится решать одну из самых сложных задач разработки, а именно задачу оптимального распределения функций контроллера между аппаратурными средствами и программным обеспечением. Решение этой задачи осложняется тем, что взаимосвязь и взаимовлияние аппаратурных средств и программного обеспечения в микропроцессорной технике претерпевают динамичные изменения. Если в начале развития микропроцессорной техники определяющим было правило, в соответствии с которым аппаратурные средства обеспечивают производительность, а программное обеспечение дешевизну изделия, то в настоящее время это правило нуждается в серьезной корректировке. Так как микроконтроллер представляет собой стандартный массовый (относительно недорогой) логический блок, конкретное назначение которого определяет пользователь с помощью программного обеспечения, то с ростом степени интеграции и, следовательно, функциональнологических возможностей микроконтроллера резко понижается стоимость изделия в пересчете на выполняемую функцию, что в конечном итоге и обеспечивает достижение высоких техникоэкономических показателей изделий на микроконтроллере. При этом затраты на разработку программного обеспечения изделия в 210 раз превышают (за время жизни изделия) затраты на приобретение и изготовление аппаратурных средств.
В настоящее время наибольшее распространение получил методологический прием, при котором весь цикл разработки контроллеров рассматривается как последовательность трех фаз проектирования:
1. анализа задачи и выбора аппаратурных средств контроллера;
2. разработки прикладного программного обеспечения;
3. комплексирования аппаратурных средств и программного обеспечения в прототипе контроллера и его отладки.
Фаза разработки программного обеспечения, т.е. фаза получения прикладных программ, в свою очередь, разбивается на два существенно различных этапа:
1. "от постановки задачи к исходной программе";
2. "от исходной программы к объектному модулю".
Этап разработки "от исходной программы к объектному модулю" имеет целью получение машинных кодов прикладных программ, работающих в микроконтроллере. Этот этап разработки прикладного программного обеспечения легко поддается формализации и поддержан всей мощью системного программного обеспечения микроконтроллера, направленного на автоматизацию процесса получения прикладных программ. В состав средств системного программного обеспечения входят трансляторы с различных алгоритмических языков высокого уровня, ассемблеры, редакторы текстов, программыотладчики, программы документаторы и т.д. Наличие всех этих системных средств придает инженерной работе на этом этапе проектирования контроллеров характер ремесла, а не инженерного творчества. Так как в конечном изделии (контроллере) имеются только "голый" микроконтроллер и средства его сопряжения с объектом, то выполнять отладку разрабатываемого прикладного программного обеспечения на нем невозможно (изза отсутствия средств ввода, вывода, ОЗУ большой емкости и операционной системы), и, следовательно, разработчик вынужден обращаться к средствам вычислительной техники для выполнения всех формализуемых стадий разработки: трансляции, редактирования, отладки, загрузки объектных кодов в программируемую постоянную память микроконтроллера.
Совсем по другому выглядит инженерный труд на этапе разработки программного обеспечения "от постановки задачи к исходной программе", так как он практически не поддается формализации и, следовательно, не может быть автоматизирован.
Проектная работа здесь носит творческий характер, изобилует решениями, имеющими "волевую" или "вкусовую" окраску, и решениями, продиктованными конъюнктурными соображениями. В силу перечисленных обстоятельств именно на этапе проектирования "от постановки задачи к исходной программе" разработчик сталкивается с наибольшим количеством трудностей.
Качество получаемого прикладного программного обеспечения контроллера всецело зависит от уровня проектных решений, принятых на этапе разработки "от постановки задачи к исходной программе". Уровень проектных решений в свою очередь изза отсутствия теории проектирования программируемых контроллеров определяется только опытом, квалификацией и интуицией разработчика. Однако накопленный опыт убеждает в том, что систематический подход к процессу разработки прикладных программ для контроллеров обеспечивает достижение хороших результатов даже начинающими разработчиками.
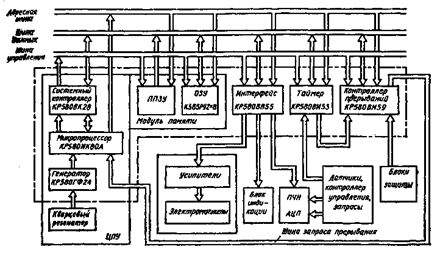
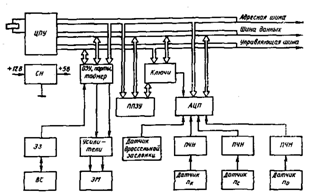
Типовая структура микропроцессорной системы управления показана на рис. 1.1 и состоит из объекта управления, микроконтроллера и аппаратуры их взаимной связи.
 Рисунок 1.1 Структура цифровой системы управления на основе МК
Рисунок 1.1 Структура цифровой системы управления на основе МК Микроконтроллер путем периодического опроса осведомительных слов (ОС) генерирует в соответствии с алгоритмом управления последовательности управляющих слов (УС). Осведомительные слова это сигналы состояния объекта (СС), сформированные датчиками объекта управления, и флаги. Выходные сигналы датчиков вследствие их различной физической природы могут потребовать промежуточного преобразования на аналогоцифровых преобразователях (АЦП) или на схемах формирователей сигналов (ФС), которые чаще всего выполняют функции гальванической развязки и формирования уровней двоичных сигналов стандарта ТТЛ.
Микроконтроллер с требуемой периодичностью обновляет управляющие слова на своих выходных портах. Некоторая часть управляющего слова интерпретируется как совокупность прямых двоичных сигналов управления (СУ), которые через схемы формирователей сигналов (усилители мощности, реле, оптроны и т.п.) поступают на исполнительные механизмы (ИМ) и устройства индикации. Другая часть управляющего слова представляет собой упакованные двоичные коды, которые через цифро аналоговые преобразователи (ЦАП) воздействуют на исполнительные механизмы аналогового типа. Если объект управлении использует цифровые датчики и цифровые исполнительные механизмы, то наличие ЦАП и АЦП в системе необязательно.
В состав аппаратуры связи, которая как правило, строится на интегральных схемах серии ТТЛ, входит регистр флагов, на котором фиксируется некоторое множество специфицируемых признаков как объекта управления, так и процесса работы контроллера. Этот регистр флагов используется в качестве аппаратурного средства реализации механизма взаимной синхронизации относительно медленных и вероятностных процессов в объекте управления и быстрых процессов в контроллере. Регистр флагов доступен как контроллеру, так и датчикам. Вследствие этого он является удобным местом фиксации сигналов «готов»/«ожидание» при передачах с квитированием или сигналов «запрос прерывания»/«подтверждение» при взаимодействии контроллера и объекта в режиме прерывания. Если МКсистема имеет многоуровневую систему прерываний, то регистр флагов содержит схему упорядочивания приоритетов.
Для аппаратурной реализации временных задержек, формирования сигналов требуемой частоты и скважности в состав аппаратуры связи включают программируемые интервальные таймеры в том случае, если их нет в составе микроконтроллера или их число недостаточно.
Законы функционирования микропроцессорной системы управления со структурой, показанной на рис. 1 всецело определяются прикладной программой, размещаемой в резидентной памяти программ микроконтроллера. Иными словами, специализация контроллера типовой структуры на решение задачи управления конкретным объектом осуществляется путем разработки прикладных программ микроконтроллера и аппаратуры связи микроконтроллера с датчиками и исполнительными механизмами объекта.
Похожие работы



... значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками: Вариант ...

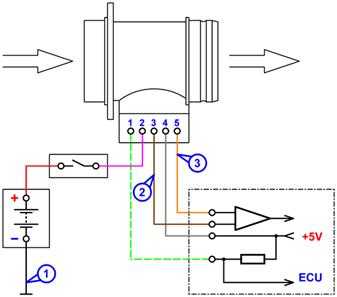
... Вести учет выполненных работ; · Сохранение информации в базе данных для выбранного клиента; · Печать отчетов о проделанной работе и найденных неисправностях. Диагностический комплекс Мотор-Тестер МТ10 позволяет осуществлять мониторинг следующих параметров: Контролируемые параметры Диапазон Осциллографический канал 1: входное напряжение: ±200 В входное сопротивление: 240 кОм ...
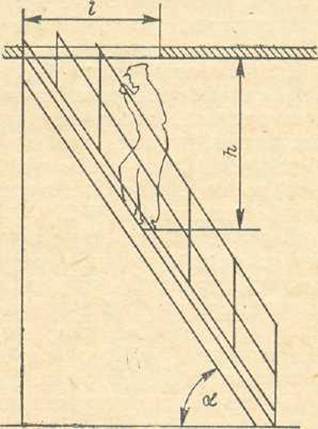
... трапа (но не менее 600 мм); для вертикальных трапов—600 мм. Между площадками и трапами нельзя делать порогов, а также размещать в пределах площадок какие-либо предметы (рымы, органы управления системами, оборудованием), о которые можно споткнуться. Над площадками и маршами наклонных трапов по всей их длине и ширине в пределах высоты двух метров не допускается располагать какое-либо оборудование, ...
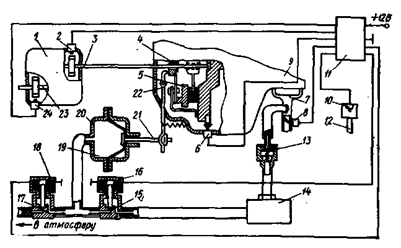
... , а при открытии клапана 17, наоборот, уменьшается. Когда оба клапана закрыты, разрежение в полости 19 остается неизменным. Рисунок 4. Структурная схема микропроцессорной системы управления сцеплением В зависимости от разрежения в полости 19. сервокамеры меняется положение ее штока 21, и соответственно регулируется момент Мс, передаваемый сцеплением. Из рассмотрения зависимости Мс от ...
0 комментариев