Навигация
Требования предъявляемые к данному типу электропривода
15251
знак
5
таблиц
1
изображение
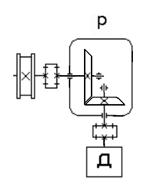
3. Требования предъявляемые к данному типу электропривода
Многолетняя практика использования на судах грузовых лебедок показывает, что их электроприводы должны:
1) быть способными работать в повторно-кратковременном режиме с ПВ не менее 40%, при многочисленных пусках, реверсах и остановках, непрерывно повторяющихся циклах, числом до 30-60 за 1 ч;
2) обеспечивать посадочную скорость груза не более 0,10-0,25 м/с и иметь широкий диапазон регулирования скорости для обеспечения достаточной производительности лебедки;
3) иметь такое число ступеней регулирования скорости, чтобы было обеспечено ускорение и замедление груза без резких рывков, способных вызвать раскачивание груза и механические повреждения электродвигателя и лебедки; иметь оптимальное соотношение скоростей, чтобы разгоны и торможения происходили с минимальными динамическими потерями энергии и динамическими нагрузками;
4) обеспечивать лебедке достаточные пусковые и перегрузочные моменты;
5) обеспечивать эффективное регулируемое электрическое торможение при опускании груза и надежное затормаживание электродвигателя при отключении электропитания;
6) иметь независимую от массы поднимаемого груза малую начальную скорость подъема, обеспечивающую плавное трогание груза с места;
7) работать в широком диапазоне возможных нагрузок, будучи приспособленными как к длительной многократной переноске грузов, так и к однократным подъемам грузов повышенной массы;
8) иметь систему управления, обеспечивающую удобство и безопасность обслуживающего персонала; иногда это требование дополняется требованием возможности управления одновременно с одного поста, в том числе дистанционного управления с переносного поста, двумя лебедками, работающими по системе «Телефон»;
9) быть надежными, экономичными и не требовать большой затраты труда на обслуживание;
10) иметь, по возможности, минимальные габариты и массу.
11) При применении автоматических устройств для регулировке натяжного троса, должна быть обеспечена возможностью контроля тягового усилия, действующая в данный момент. Указатели должны быть установлены около лебедки.
12) Должна быть предусмотрена звуковая предупредительная сигнализация, срабатывающая при максимально допускаемой длине работы троса.
13) Барабаны лебедок должны быть снабжены троссоукладчиками.
14) Лебедка должна иметь автоматическое тормозное устройство, удерживающее трос при тяговом усилии, равном не менее 1.25-кратному номинальному усилию при исчезновении или отключении энергии приводной лебедки.
15) Тросовый барабан лебедки должен иметь тормоз, удерживающий без скольжения, и при отсоединенном от привода барабане усилие не меньше чем нагрузка, разрывающая трос.
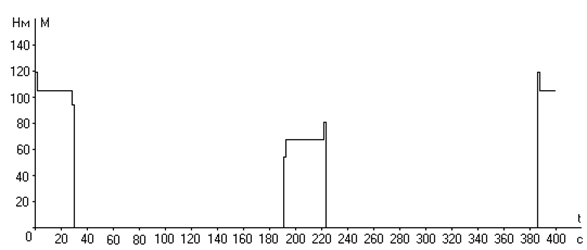
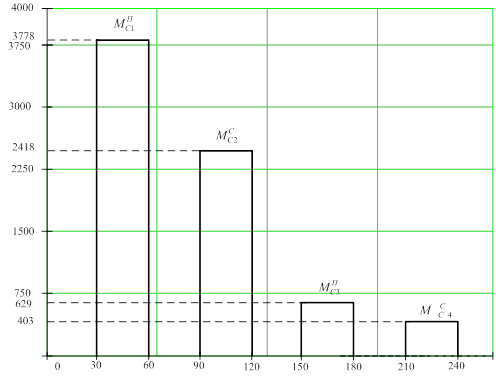
4. Выбор электродвигатель по нагрузочной диаграмме.
Эквивалентная мощность:
![]()
![]()
![]() =4.7кВт
=4.7кВт
Для нормальной работы электродвигателя без перегрева необходимо, чтобы Рном ≥ Рэкв.
По нагрузочной диаграмме необходимо определить расчетный коэффициент продолжительности включения
ПВрас = ![]() ,
,
ПВрас = ![]() = 0,46 = 46 %.
= 0,46 = 46 %.
и расчетную производительность грузоподъёмного устройства, обусловленную числом грузовых циклов в час:
N = ![]()
N = ![]() = 40
= 40
Выбираем электродвигатель (с соблюдением условия Рном ≥ Рэкв) АО2-42-4ОМ2, с техническими характеристиками:
Таблица 3
| Тип Электродвигателя | Мощность, кВт | Частота Вращения, Об/мин | Линейный ток, А | КПД, % |
| ||||||
| 220 В | 380В | ||||||||||
| АО2-42-4ОМ2 | 5,5 | 1450 | 19,3 | 11,2 | 87,0 | 0,86 | |||||
| Кратность Пускового Тока. | Кратность момента | Скольжение % | Маховый Момент, Кг*м² | Допустимое время стоянки Под током К.З., с | |||||||
| Пускового | Максимального | Мини-мального | |||||||||
| 7,0 | 1,5 | 2,0 | 1,0 | 4,0 | 0,12 | 18 | |||||
5. Расшифровка обозначения двигателя
АО2-42-4ОМ2:
А – асинхронный, О – обдуваемый,
2 – вторая общесоюзная серия,
4 – габарит,
2 – условная длинна,
4 – число полюсов,
ОМ – климатическое исполнение,
2 – категория размещения.
6. Расчет механической характеристики асинхронного двигателя с короткозамкнутым ротором
Номинальный момент:
![]() =
= ![]() =36.22 (Нм)
=36.22 (Нм)
Кратность максимального момента: ![]() = 2.
= 2.
Максимальный вращательный момент:
![]() , =>
, => ![]() (Нм)
(Нм)
Номинальное скольжение:
![]()
![]() =
= ![]() о.е.
о.е.
Где n1н – синхронная частота вращения, берется из таблицы ближайшее большее число к n2н в соответствии с числом пар полюсов р при промышленной частоте f=50 Гц.
Таблица 4
| р | 1 | 2 | 3 | 4 |
| n1н об/мин | 3000 | 1500 | 1000 | 750 |
Критическое скольжение:
![]()
![]() =
= ![]()
Значение моментов для механической характеристики:
М = ![]()
М = ![]()
М = ![]()
М = ![]()
М = ![]()
М = ![]()
Значение частот вращения ротора n2 для механической характеристики:
n2 = n1н (1 – S)
При номинальном скольжении n2 =1500 (1 – 0.033) =1450 ,об/мин
При критическом скольжении
n2 =1500 (1 – 0.123) =1315, об/мин
При s =0.1 n2 =1350, об/мин
При s =0.2n2 =1200, об/мин
При s =0.4n2 =900, об/мин
При s =0.6n2 =600, об/мин
При s =0.8n2 =300, об/мин
При s =1.0n2 =0
Результаты расчетов по формулам сводим в таблицу:
Таблица 5
| S |
|
| 0.1 | 0.2 | 0.4 | 0.6 | 0.8 | 1.0 |
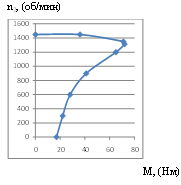
| М, Н*м | 36 | 72 | 71 | 65 | 41 | 28 | 22 | 17 |
| n2, об/мин | 1450 | 1315 | 1350 | 1200 | 900 | 600 | 300 | 0 |
По данным табл. строим механическую характеристику электродвигателя
7. Выбор аппаратов управления
Плавкие предохранители:
Плавкие предохранители для схем управления выбираются по условиям:
Iном.в ≥ Iраб. , Iном.в ≥ ![]()
Iном.в – номинальный ток плавкой вставки
Iраб – длительно протекающий ток
Iп – пусковой ток
U = 380 В
Iн = 11.2 А
Iп = 11.2× 6 = 67.2 А кратность пускового тока = 6
Iном.в ≥ 26 А
По справочнику принимаем предохранитель типа ПР – 2 (типоразмер) с номинальным током плавкой вставки 26 А
Автоматический выключатель:
Iн.р. ≥ 1.15×β×Imax
Iн.р. ≥ 1.15×1.2×56= 77 А
Где
Iн.р. – номинальный ток расцепления,
β – коэффициент, добавляемый для защиты двигателя от перегрузки (β=1.2 при тяжелых условиях пуска).
Условие Iн.р. ≥ 77 Iном = 11.2 выполняется
По справочнику принимаем автоматический выключатель серии АМ8, с номинальным током расцепления А.
Автоматические выключатели серии АМ8 предназначены для максимально-токовой защиты электрических установок и кабелей при перегрузках и замыканиях, а так же для нечастых оперативных включений и отключений этих цепей.
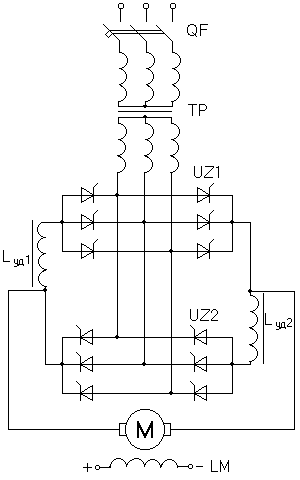
8. Схема управления пуском и реверсом асинхронного двигателя с короткозамкнутым ротором в функции времени
Начинать следует с подключения схемы управления в сеть переменного тока автоматом QF. После подачи напряжения на двигатель получит питание и сработает реле времени КТ и разомкнет свой контакт в цепи контактора КМ2. Пуск эл. двигателя производится нажатием кнопки SB1 и срабатыванием при этом контактора КМ1. В момент включения двигателя блокировочный контакт контактора КМ1 в цепи катушки реле времени разомкнется, и реле времени потеряет питание. С этого момента начнется выдержка времени на замыкание его контакта в цепи катушки контактора КМ3. Двигатель набирает обороты на пониженном напряжении (понижение пускового тока) до тех пор, пока не закончится выдержка времени реле КТ. После прохождения выдержки времени контакт КТ замкнется и подаст напряжение на контактор КМ3, контакты которого зашунтируют сопротивления в цепи статора. Остановка эл. двигателя производится нажатием кнопки SB3. При нажатии кнопки SB2 цепи управления обесточиваются и контакторы КМ1и КМ2 размыкаются. Напряжение в силовой цепи эл. двигателя пропадает и он останавливается. При необходимости запустить эл. двигатель в обратном направлении – нажимается кнопка SB2. Цикл запуска повторяется с той, лишь, разницей, что вместо контактора КМ1 будет работать контактор КМ2, который перефазирует эл. двигатель и он будет вращаться в обратную сторону. В схеме использовано реле времени с демпферной гильзой и встроенным выпрямительным устройством. Блокировочные контакты КМ1 и КМ2 в цепях катушек контакторов КМ1 и КМ2 обеспечивают невозможность одновременного срабатывания. Также включена в схему тепловая защита эл. двигателя.
Заключение
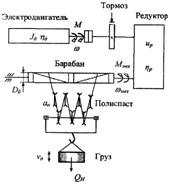
Грузоподъемные механизмы служат для выполнения погрузочно-разгрузочных операций при стоянке судна в порту или в открытом море. В зависимости от назначения судовые грузовые подъемные механизмы подразделяются на грузовые, шлюпочные, буксирные и др. Грузоподъемные механизмы могут иметь ручной, паровой, электрический и гидравлический приводы. Ручной привод используется редко и может применяться в качестве основного у лебедок малой грузоподъемности. К судовым грузоподъемным механизмам относятся лебедки и краны.
Лебедки обслуживают грузовое устройство судна и предназначены для наматывания на барабан (и сматывания с него) троса. Грузовые лебедки, как правило, имеют швартовные турачки.
Список литературы
1. Е.П. Матафонова., Электрооборудование судов: Методическое пособие к курсовой работе. Владивосток: Дальрыбвтуз 2007г.
2. Справочник судового электротехника: В 3 т. / Под общ. Ред. Г.И. Китаенко. Ленинград. Судостроение,1990 г. Т.2.
3. Е.П. Матафонова. Аппаратура управления и защиты. Виды защит в электроприводе: Методическое пособие к практическим занятиям. Владивосток: Дальрыбвтуз,1999г.
4. Белова М.В., Матафонова Е.П. Типовые схемы управления электроприводом: Методическое пособие к практическим занятиям. Владивосток: Дальрыбвтуз, 1999г.
5. Быховский Ю.И., Шеинцев Е.А.Электрооборудование судов рыбной промышленности. Судостроение. Ленинград.1976г.
6. Роджеро И.Н. Справочник судового электромеханика и электрика.
Москва. Транспорт. 1982 г.
7. Вольдек А.И. Электрические машины. Ленинград. 1978 г.
Похожие работы
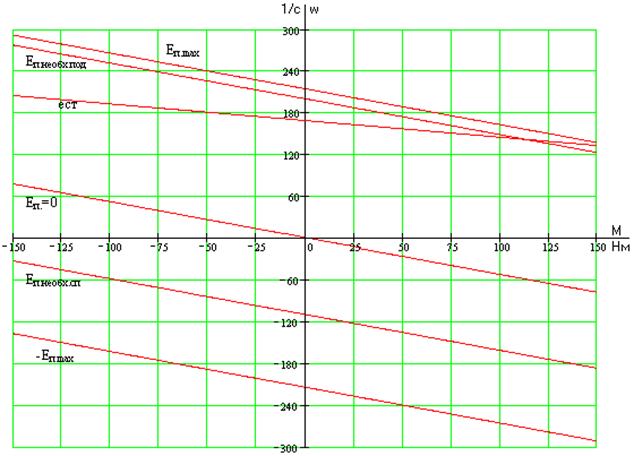
... обмоток трансформатора: Ом Rуд – активное сопротивление уравнительных дросселей: Ом. Итак, Ом Ом. Выводы по главе 1. В главе 1 на основе технических данных и требований электропривода подъемного механизма крана был произведен выбор схемы ЭП. В результате анализа и обзора применяемых систем регулирования показана целесообразность применения системы тиристорный преобразователь – ...
... , которая бы обеспечила заданные режимы его работы. 1. Выбор основных элементов электрооборудования механизма подъема мостового крана по исходным данным. 1.1 Исходные данные для выбора электропривода механизма подъема мостового крана Вариант 22 Грузоподъемность крана , т 140 Номинальная скорость подъема (спуска) , м/с 0,1 Допустимое ускорение , м/с2 0,1 Рабочий путь ...


... аппаратурой, которая, как и двигатель, работает в широком диапазоне изменения нагрузок и частоты включений. Управление электроприводами башенных кранов осуществляется с помощью контроллёров. Контроллёром называется многопозиционный аппарат, предназначенный для управления электрическими машинами путём коммутации резисторов и обмоток машин; он производит все переключения в цепи электродвигателя, ...
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
0 комментариев