Навигация
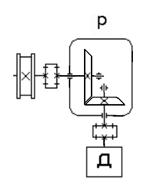
Управление электроприводом грузоподъемного механизма
15251
знак
5
таблиц
1
изображение
Содержание
1. Задание к курсовой работе. Исходные данные к курсовой работе
2. Краткое описание основных этапов работы электропривода
3. Требования, предъявляемые к электроприводу
4. Выбор электродвигатель по нагрузочной диаграмме
5. Расшифровка буквенных и цифровых значений
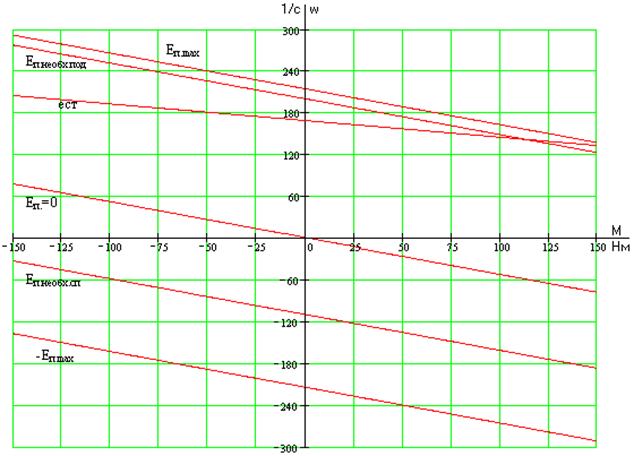
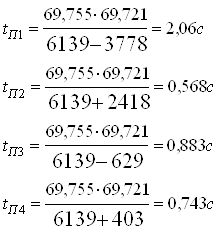
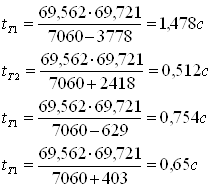
6. Расчет механической характеристики и построение диаграммы
7. Выбор аппаратов управления
8. Описание работы схемы управления
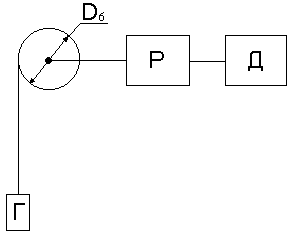
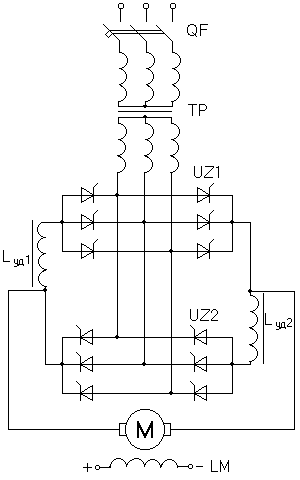
9. Принципиальная электросхема привода
Заключение
Список литературы
1. Задание к курсовой работе
1.1 Выбрать электродвигатель согласно нагрузочной диаграмме и типу электропривода.
1.2 Кратко описать основные этапы работы электропривода.
1.3 Сформулировать требования, предъявленные к данному типу электропривода.
1.4 Расшифровать буквенное и цифровое условное обозначение электродвигателя.
1.5 Рассчитать и построить в масштабе механическую характеристику электродвигателя.
1.6 Начертить по ГОСТу электрическую схему управления электроприводом с необходимыми видами защит.
1.7 Выбрать предохранители, автоматические воздушные выключатели и контакторы для данного электродвигателя. Расшифровать условное обозначение аппаратов.
1.8 Описать работу электрической схемы.
Исходные данные к курсовой работе
Таблица 1
| Электропривод грузоподъемной лебедки | ||||||||
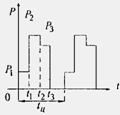
| № вар. | P1, кВт | P2, кВт | P3, кВт | t1, с | t2, с | t3, с | tЦ, с | n, об/мин |
| 7 | 6 | 3 | 5 | 15 | 17 | 10 | 90 | 1420 |
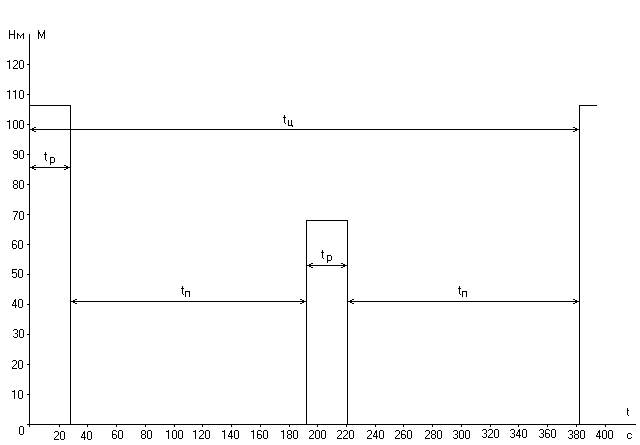
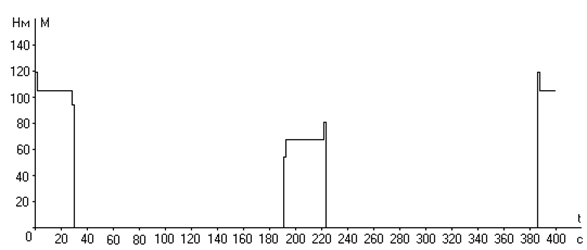
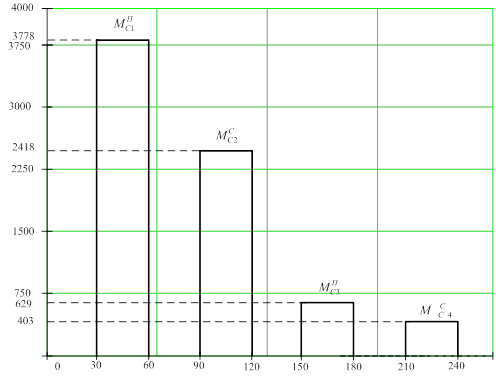
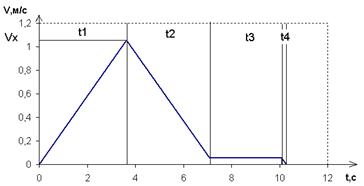
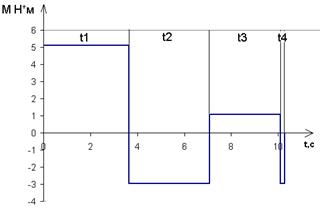
Нагрузочная диаграмма
2. Краткое описание основных этапов работы электропривода
Большинство судов оборудованы грузоподъёмными устройствами и механизмами, обеспечивающими выполнение погрузочно-разгрузочных операций по перемещению различных предметов: грузовые лебедки и краны, шлюпочные, буксирные, на рыболовецких судах - траловые лебёдки, лифты и т. д.
Основные требования, предъявленные к электроприводам грузоподъёмных устройств – это высокая производительность, надёжность и экономичность, безопасность грузовых операций, обеспечение сохранности груза, удобство в управлении.
Этим требованиям удовлетворяют в полной мере ДПТ (по системе Г-Д), обладающие полным диапазоном регулирования частоты вращения, допускающие значительные перегрузки по моменту при пуске, и реверсе. Однако значительная масса и габаритные размеры ограничивают их применение на современных судах.
Наибольшее распространение получили многоскоростные асинхронные двигатели с короткозамкнутым ротором, предназначенные для судовых грузовых лебедок.
Грузовые операции на современных судах выполняются как с одной лебёдкой, так и с двумя лебёдками с двумя стрелами на один гак, что значительно убыстряет работу одной стрелы.
Грузовой цикл состоит из подъема груза (например, с трюма), поворота стрелы; спуска груза; выгрузки, подъема гака без груза, поворота стрелы; спуска гака, погрузки и т. д. Каждому этапу соответствует определенная нагрузка электродвигателя.
Таким образом, работа грузоподъёмного механизма грузовой лебёдки характеризуется повторно-кратковременным режимом с заданной продолжительностью включения ПВ не менее 40 %.
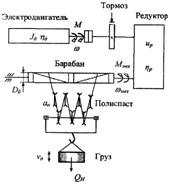
Выбор мощности двигателя для механизма подъёма крана и для лебёдки может быть сделан по конструктивным и эксплуатационным параметрам, основными из которых являются масса поднимаемого груза, высота подъёма и опускание груза, скорости подъёма груза и спуска, передаточное число редуктора, диаметр барабана лебедки, механический КПД передачи и т. д.
Перемещение груза двумя лебедками по системе ТЕЛЕФОН.
Грузовые операции могут быть выполнены как с помощью одной лебедкой и одной стрелы, так и двух лебедок, работающих с двумя стрелами на один гак. Обычно при перегрузках для этого используют по одной стреле и лебедке на загружаемом судне и на принимающей базе. Грузовые стрелы на обоих судах с помощью растяжек и топенантов закрепляют неподвижно так, что ноки находятся над центрами просветов грузовых люков. Шкентели обеих лебедок закрепляют на общем гаке. Лебедки перемещают гак с укрепленным на нем грузом с траулера на базу, а затем переводят порожний гак обратно в трюм разгружаемого судна.
Такой способ перегрузки получил название работы по системе «Телефон». Работая с двумя стрелами, можно переносить груз по горизонтали, на большее расстояние, чем с одной. При этом процесс перегрузки ускоряется, так как все перемещения груза производятся эл. двигателями. при работе одной стрелой горизонтальное перемещение груза осуществляется поворотом стрелы, а на это требуется дополнительное время. Морская практика показала, что при работе одной стрелой цикл передачи груза занимает до 4-5 минут, в то время как работая по системе «Телефон» цикл можно выполнить за 60-80 секунд.
Таблица 2
| Операция | Отрезок времени на нагрузочной диаграмме | Состояние лебедки траулера | Состояние лебедки транспортной базы |
| застропка груза | Т1 | заторможена | заторможена |
| обтягивание стропа или троса | Т2 | работает на подъем, развивая момент М1т | работает на подъем, развивая момент М1б |
| подъем груза из трюма траулера | Т3 | подъем груза из трюма траулера с моментом М2т | выбирает слабину шкентеля, развивает момент М2б |
| горизонтальное перемещение груза | Т4 | работает на спуск, развивая момент М3т | работает на подъем, развивая момент М3б |
| опускание груза в трюм базы | Т5 | вытраливает шкентель с моментом М4т | работает на вертикальный спуск груза под тормозным моментом М4б |
| расстропка груза | Т6 | заторможена | заторможена |
| подъем холостого хода | Т7 | выбираем слабину шкентеля, развивает момент М5т | поднимает порожний гак, развивая момент М5б |
| горизонтальное перемещение пустого гака | Т8 | выбирает шкентель, перетягивает в сторону траулера, развивая момент М6т | травит мотором шкентель, создавая нужную слабину, развивая момент М6б |
| опускание пустого гака в трюм траулера | Т9 | травит мотором шкентель, опуская гак и развивая момент М7т | Травит мотором шкентель, обеспечивая достаточную слабину для вертикального перемещения гака в трюм, развивая момент М7б |
Недостатками системы «Телефон» является то, что при горизонтальном перемещении груза на шкентелях возникает повышенная нагрузка. Из-за этого грузоподъемность системы стрел и лебедок может быть ниже паспортной на 40-60%
Похожие работы
... обмоток трансформатора: Ом Rуд – активное сопротивление уравнительных дросселей: Ом. Итак, Ом Ом. Выводы по главе 1. В главе 1 на основе технических данных и требований электропривода подъемного механизма крана был произведен выбор схемы ЭП. В результате анализа и обзора применяемых систем регулирования показана целесообразность применения системы тиристорный преобразователь – ...
... , которая бы обеспечила заданные режимы его работы. 1. Выбор основных элементов электрооборудования механизма подъема мостового крана по исходным данным. 1.1 Исходные данные для выбора электропривода механизма подъема мостового крана Вариант 22 Грузоподъемность крана , т 140 Номинальная скорость подъема (спуска) , м/с 0,1 Допустимое ускорение , м/с2 0,1 Рабочий путь ...


... аппаратурой, которая, как и двигатель, работает в широком диапазоне изменения нагрузок и частоты включений. Управление электроприводами башенных кранов осуществляется с помощью контроллёров. Контроллёром называется многопозиционный аппарат, предназначенный для управления электрическими машинами путём коммутации резисторов и обмоток машин; он производит все переключения в цепи электродвигателя, ...
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
0 комментариев