Навигация
2.12 Оценка точности места
Навигационная безопасность мореплавания обеспечивается счислением пути судна и периодическими обсервациями только с учетом их точности, которая традиционно оценивается среднеквадратической погрешностью СКП (M), вероятность которой составляет Р = 63%.
Однако «Стандартами точности судовождения» ИМО для оценки точности текущего (счислимого) места судна принята вероятность Р = 95%. Этому требованию практически удовлетворяет круг радиусом R = 2М (мили).
Требования к точности судовождения при плавании в любой зоне, допустимое время плавания по счислению, значения СКП измерения возможных на переходе навигационных параметров, а также формулы для расчёта СКП счисления, СКП счислимого места возможных обсерваций приведены в таблицах 2.12 и 2.13
Таблица 2.12 – Расчёт СКП места судна
| Характеристика места судна | Формула для расчета радиальной (круговой) средней квадратической погрешности места судна | Примечание |
| Счислимое место судна |
| МО– СКП последней, принятой к счислению обсервации (мили); МСt – СКП счисления (мили). |
| СКП счисления пути судна | (+) (+) | КС – коэффициент точности счисления в данном районе, рассчитываемый по невязкам в счислении; t – время плавания по счислению, (ч). |
| Обсервованное по двум пеленгам на два ориентира место судна (2П, 2РЛП, 2РП) |
|
q – разность пеленгов на ориентиры (£ 90°); D1, D2 – расстояния от обсерво-ванного места до 1-го (D1) и 2-го (D2) ориентира, (мили). |
| Обсервованное место по пеленгам на три ориентира (3П) |
или |
D1,2,3 – расстояние в милях до 1-го (D1), 2-го (D2) и 3-го (D3) ориентира (мили); a, b – углы между пеленгами на ориентиры (град.); МО2 – СКП обсервации по двум пеленгам (мили). |
| «Крюйс-пеленг» |
| МО – СКП в определении места по 2-м пеленгам (мили); МСt – СКП в счислении за время между П1 и П2 (мили); q – разность пеленгов (град.). |
| Обсервованное место по пеленгу и расстоянию до одного ориентира (П и DР) |
|
mD – СКП измерения расстояния до ориентира (мили); D – расстояние до ориентира (мили). |
| Обсервованное место по расстояниям до двух ориентиров (2D) | (х) | q – угол между направлениями на ориентиры (град.); mD1,2 – СКП измерения расстояний (мили); При mD1 = mD2 = mD –
|
| Обсервованное место по расстояниям до трех ориентиров (3D) |
| mD – СКП измерения расстояния до ориентира, (мили); q – угол между направлениями на ориентиры (град.) |
| «Крюйс-расстояние» |
| МО – СКП определения места по расстояниям до двух ориентиров (мили) (х); МСt – СКП счисления за время между D1 и D2 (+); q – угол между ЛП1 и ЛП2 в точке пересечения D1 и D2 (град.) |
| Обсервованное место по двум горизонтальным углам трех ориентиров (2 ÐÐ) |
| D1,2,3 – расстояния от обсервованного места до 1, 2 и 3 ориентира (мили);
d1-2, d2-3 – расстояния между ориентирами, (мили); q – угол пересечения линий положения (град.) |
| Обсервованное место по горизонтальному углу между ориентирами и пеленгу на один из них (другой закрыт для взятия на него Пº) |
| a – измеренный горизонтальный угол (град.); ma – СКП измерения угла (угл. мин.);
D2 – расстояние до ориентира закрытого для пеленгования (мили); d1-2 – расстояние между ориентирами, (мили) |
| Обсервованное место по горизонтальному углу между двумя ор-ми и расстоянию до одного из них (при сомнении в ∆К) |
| ma – СКП измерения горизон-тального угла (угл. мин.); mD – СКП измерения расстояния, (мили); D1, D2 – расстояние до ориентиров, (мили); d – расстояние между ориентирами, (мили) |
| Обсервованное место по пеленгу на ориентир и высоте светила (П и h) |
| mh – СКП измерения высоты светила (угл. мин.);
D – расстояние до ориентира, (мили); q – угол пересечения линий положения (град.) |
| Обсервованное место по секторным РМКАМ или РНС с использованием радионавигационных карт |
или | mЗН – СКП в определении Орт.П (знаков); mU – СКП измерения радионавигационного параметра (мкс., ф.ц); Δ – разность оцифровки соседних гипербол, между которыми находится обсервованное место (зн., мкс, ф.ц); L – расстояние в милях между этими гиперболами у обсервованного места (кратчайшее), мили |
| Обсервованное место по спутниковой РНС (ЗНИСЗ) |
| mr – CКП определения расстояния до НИСЗ; hСР – средняя угловая высота НИСЗ; ΔA – разность азимутов между парами НИСЗ; Г – геометрический фактор
|
 , (мили)
, (мили) , (мили)
, (мили)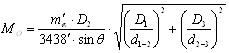 , (мили)
, (мили) , (мили)
, (мили) , (мили)
, (мили)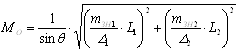 , (мили)
, (мили) , (мили)
, (мили)Таблица 2.15 – Требования к точности судовождения
| Зона плавания судна | Радиальная СКП определения места | Частота обсерваций | Допустимое время обработки навигационных параметров | |
| Зона стесненного плавания: | · Акватория портов, гаваней | 5¸20 м | непрерывно | мгновенно |
| · Узкие (100¸200 м) каналы, фарватеры | 0,15 их ширины | 1¸5 мин. | 0,5¸1 мин. | |
| Прибрежная зона*: | · Фарватеры, шириной 2¸20 кб. | 0,2 их ширины | 1¸5 мин. | 0,5¸1 мин. |
| · СРДС | 0,2 ширины полосы движения (1¸5 кб.) | 10¸30 мин. | 1¸3 мин. | |
| · Рекомендованные пути в расстоянии до 25 миль от берега | 2% от расстояния до берега, но не > 2 миль | 20¸30 мин. | 1¸3 мин. | |
| · Рекомендованные пути в расстоянии > 25 миль от берега | не > 2 миль | 1¸2 часа | 5¸10 мин. | |
| Зона открытого моря | 2% от расстояния до навигационной опасности, но не > 2 миль | 2¸4 часа | 10¸15 мин. | |
Таблица 2.16 – Допустимое время плавания по счислению (мин.) для Кс = 1,2
| Дистанция до опасности | Требуемая точность (мили) с Р = 95% | Погрешность последней обсервации МО с (Р = 95%), мили | ||||||||||
| 0,0 | 0,1 | 0,25 | 0,5 | 1,0 | 2,0 | |||||||
| максимально допустимый интервал от последней обсервации (мин) | ||||||||||||
| 10 | 0,4 | 12 | 12 | 9 | – | – | – | |||||
| 20 | 0,8 | 28 | 28 | 27 | 22 | – | – | |||||
| 30 | 1,2 | 42 | 48 | 47 | 44 | 27 | – | |||||
| 40 | 1,6 | 72 | 72 | 71 | 68 | 56 | – | |||||
| 50 | 2,0 | 100 | 100 | 99 | 97 | 87 | – | |||||
| 60 | 2,4 | 132 | 132 | 131 | 129 | 120 | 73 | |||||
| 70 | 2,8 | 168 | 168 | 167 | 165 | 157 | 118 | |||||
| 80 | 3,2 | 208 | 208 | 207 | 206 | 198 | 162 | |||||
| 90 | 3,6 | 252 | 252 | 251 | 250 | 242 | 210 | |||||
| 100 | 4,0 | 300 | 300 | 299 | 298 | 291 | 260 | |||||
При плавании в прибрежной зоне обсервация считается приемлемой, если ее точность в 3 раза и более выше точности счислимого места. В этом случае ее принимают к счислению
Таблица 2.17 – Вероятность обнаружения подходного буя в зависимости от точности места и расстояния до буя
| СКП места М (мили) | Дальность обнаружения буя (мили) | Если СКП текущего места не превышает 1 мили, то обеспечивается высокая (>0,95) вероятность обнаружения буя как с помощью РЛС, так и визуально | |||||
| 2,5 | 3,0 | 3,5 | 4,0 | 4,5 | 5,0 | ||
| 0,5 | ≈1 | ≈1 | ≈1 | ≈1 | ≈1 | ≈1 | |
| 1,0 | 0,956 | 0,989 | 0,982 | 0,997 | ≈1 | ≈1 | |
| 1,5 | 0,753 | 0,865 | 0,934 | 0,973 | 0,989 | 0,9963 | |
Таблица 2.18 – Значение коэффициента Кр2 в зависимости от заданной вероятности (Рзад) при неизвестных элементах эллипса погрешностей
| Рзад | 0,900 | 0,950 | 0,960 | 0,980 | 0,990 | 0,993 | 0,997 | 0,999 |
| Кр2 | 1,53 | 1,73 | 1,8 | 2,0 | 2,15 | 2,23 | 2,41 | ~3,0 |
Предельная (с Рзад) погрешность места судна рассчитывается по формуле:
![]()
где М – СКП места судна.
0 комментариев