Навигация
Назначение отдельных функциональных блоков
37785
знаков
4
таблицы
8
изображений
2.1.1 Назначение отдельных функциональных блоков
Блок ЦПУ предназначен для преобразования входного аналогового сигнала в цифровое представление, сравнения этого значения с константами и в зависимости от результата сравнения осуществлять управление устройством индикации, предварительно преобразовав информацию о уровне аналогового входного сигнала в форму пригодную для блока индикации.
Блок индикации предназначен для вывода информации о уровне входного аналогового сигнала, в виде десятичных чисел, с заданными количеством знакомест и частотой обновления данных. Кроме того блок индикации с помощью двух светодиодов и динамика информирует попадает ли уровень сигнала в область, ограниченную константами Кі1 и Кі2.
2.2 Описание принципа действия и общий алгоритм работы
Аналоговый сигнал, поступающий на вход АЦП микроконтроллера, преобразовывается в цифровое представление. Затем микроконтроллер сравнивает уровень входного сигнала с двумя константами, хранящимися в ПЗУ, и в зависимости от результата сравнения подает сигналы на динамик и светодиоды, по линиям СД. Кроме того микроконтроллер преобразовывает информацию о уровне аналогового входного сигнала в форму пригодную для блока индикации, эта информация передается по линиям СД.
Обновление информации на блоке индикации целиком зависит от МК, оно происходит с заданной частотой 44 Гц. По линиям УС, от микроконтроллера в блок индикации, передаются сигналы, предназначенные для выбора знакоместа.
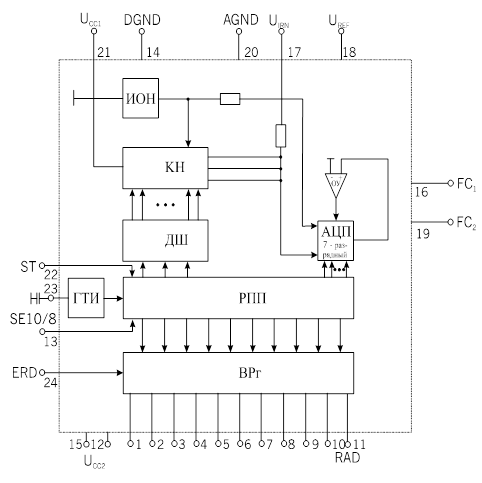
2.3 Функциональная схема устройства и ее краткое описание

Рисунок 3.1 Функциональная схема МКУ
Тактирование
поскольку на устройство наложены достаточно жесткие меры по скорости измерения мы будем использовать кварцевый генератор, кроме того с помощью замены кварца мы можем варьировать временем выполнения программы.
4. Расчет потребляемой мощности и определение требований к источникам питания.
4.1 Расчет потребляемых токов
Расчет потребляемых токов сводится к тому, что необходимо определить суммарное потребление тока всеми микросхемами, то есть:
 (4.1)
(4.1)
где Iобщ - общий ток, потребляемый устройством,
Ik - ток, потребляемый k-той микросхемой,
m - общее число микросхем,
n - число микросхем данного типа.
*При условии индикации «8». Поскольку у нас динамическая индикация, то одновременно горит только один индикатор, поэтому общий потребляемый ток равен 35 mA( тоже самое и со светодиодами).
Получаем общий ток потребления:
Iобщ = 25 + 35 + 10+ 25 = 95 mA
4.2 Расчет потребляемой мощности
Расчет потребляемой мощности сводится к тому, что необходимо определить мощность потребляемую устройством, то есть:
![]() (4.2)
(4.2)
где Робщ - общая потребляемая мощность,
Uпит - напряжение питания,Iобщ - общий ток потребления.
![]()
Принимаем потребляемую мощность не более 0,5 Вт.
4.3 Расчет надежности
Интенсивность отказов l характеризуется отношением числа изделий в единицу времени к числу изделий, продолжающих оставаться исправными к началу рассматриваемого промежутка времени:
 (4.3)
(4.3)
где m - число изделий, отказавших за время t,
N - число исправно работающих изделий к началу промежутка времени.
Интенсивность отказов элементов следующая:
микросхемы – 0.85×10-6 (ч-1),
резисторы – 0.9×10-6 (ч-1),
конденсаторы – 1.4×10-6 (ч-1).
Тогда,
![]() (ч-1)
(ч-1)
![]()
Поскольку не учтена интенсивность отказа некоторых элементов примем что наработка на отказ составит около 35 000 часов. Такую надежность устройства можно считать приемлемой.
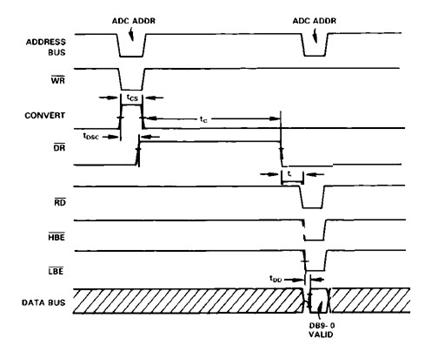
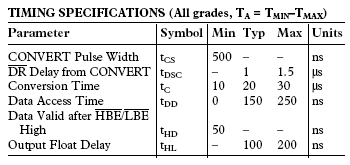
5. Расчет временных параметров
По ТЗ разрабатываемое устройство должно проводить динамическую индикацию с частотой 44Гц. И, в определенной ситуации, звуковую индикацию, с частотой последовательности импульсных сигналов 3730 Гц.
Для соблюдения поставленных в ТЗ условий нам потребуется выполнять процедуру динамической индикации через время tди=22727 мкс, а процедуру звуковой индикации через время tзи=268 мкс.
Нам известно что скорость выполнения одной команды, при использовании PIC16C72, тактируемого от кварца 4Мгц, занимает четыре такта (не считая goto и т.п.), т.е скорость выполнение среднестатистической команды равна 1 МГц. Значит наша процедура динамической индикации должна срабатывать каждые 22727 командных циклов микроконтроллера, а процедура звуковой индикации каждые 268 командных циклов.
Кроме того нам известно, что АЦ преобразование в выбранном нами микроконтроллере (PIC16C72) длиться не более 20 мкс.
Эти данные будут нужны при настройке таймеров и задержек в программе.
6. Разработка и отладка рабочей программы .
Возможно предложить следующие варианты решения поставленной задачи:
1. Написать программу которая в непрерывном цикле Производит АЦП преобразование, перевод результата в семисегментный код, и осуществляет динамическую индикацию.
Преимущества : легко написать программу (не сложный алгоритм)
Недостатки: труднее высчитывать задержки для обеспечения динамической и звуковой индикации с заданной частотой. Из-за не постоянного времени выполнения процедуры преобразования в семисегментный код, не получиться обеспечить точную частоту обновления.
2. Написать программу которая в непрерывном цикле Производит АЦП преобразование, перевод результата в семисегментный код. Складывает результаты в буффер. По прерываниям таймеров происходит динамическая и звуковая индикация.
Преимущества: данный подход обеспечит точную частоту звуковой и динамической индикации. Не нужно подбирать задержки для индикаций. Можно чаще снимать данные с АЦП и выводить их позднее, а это уменьшает вероятность того, что мы пропустим резкое изменение уровня входного сигнала.
Недостатки: разработка программы усложниться за счет использования таймеров и прерываний от них. Кроме того нужно каким-то образом организовать буфер для хранения результатов АЦП.
Учитывая все вышесказанное, мы выбираем 2 вариант, т.к. на наш взгляд он более приспособлен для решения поставленной задачи.
Похожие работы
... сигнал. Выходной сигнал ЦАП фильтруется ФНЧ и поступает на выход преобразователя для цифрового магнитофона. Описание работы принципиальной схемы В приложении 2 приведена электрическая схема рассмотренного выше устройства преобразования аналоговых сигналов. Работает оно следующим образом. Через ФНЧ с частотой среза 15 кГц на ОУ DA1.1 входной сигнал поступает на один из входов сумматора – ...
... одноканального устройства контроля температуры для контроля и измерения температур силовых элементов, отвечающих за управление ДПТ, в диапазоне от 0 до 100°С. 1.4 Режимы работы устройства Одноканальное устройство контроля температуры будет работать в одном режиме. Измерение по прерываниям. В этом режиме цикл чтения информации с устройства будет осуществляться по прерыванию основной ...
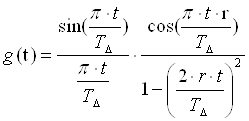
... несущими и амплитудно-фазовая модуляция с одной боковой полосой (АФМ-ОБП). 3. Выбор длительности и количества элементарных сигналов, используемых для формирования выходного сигнала В реальных каналах связи для передачи сигналов по частотно ограниченному каналу используется сигнал вида , но он бесконечен во времени, поэтому его сглаживают по косинусоидальному закону. , где - ...
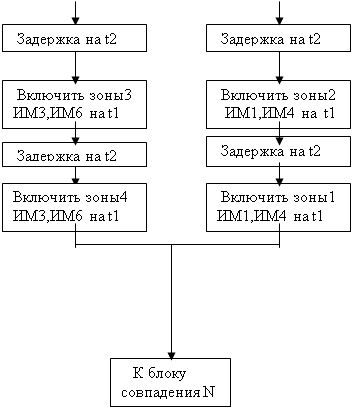
... информации хотя бы на двух датчиках из трех. Каждый датчик состоит из четырех зон, последовательность включения которых определяет направление движения подвижного состава. Стенд проверки устройства контроля свободности железнодорожного перегона должен: - формировать сигнал занятия рельсовой цепи РЦ для счетных пунктов СП1 и СП2; - формировать сигнал ИВ для сброса показаний счетно-решающего ...
0 комментариев