Тело обладает неограниченной теплопроводностью, что приводит к отсутствию градиента температуры по любому направлению в его объеме
Патентное исследование
Расчет тепловых сопротивлений
Внутренний диаметр сердечника D, м;
Потери в обмотке ротора
Синтез структурной схемы тепловой модели асинхронного двигателя
Автоматизация расчетов параметров тепловой модели асинхронного двигателя
Число параллельных ветвей а=1;
Экономический расчет
Навигация
Синтез структурной схемы тепловой модели асинхронного двигателя
Моделирование нагрева асинхронного двигателя
85971
знак
4
таблицы
45
изображений
3.2 Синтез структурной схемы тепловой модели асинхронного двигателя
По выражениям (3.16) и (3.17) строим структурную схему модели в приложении Simulink.
Структурная схема для определения температуры меди приведена на рисунке 3.1. Блоки «S1», «S2» и «S3» моделируют различные режимы нагрузки двигателя. Блок «Switch» служит для выбора одного из режимов «S1», «S2» или «S3». Он управляется источником постоянного воздействия «Rezhim». Блок «Poteri» представляет собой подсистему, рассчитывающую потери в двигателе в зависимости от нагрузки. Блоки «Tm(0)» и «Tst(0)» служат для задания начальных температур меди и стали. Блок «Tv» задает значение температуры окружающего воздуха. В блоки передаточных функций «Cu», «Fe», «Cu(0)», «Fe(0)» и «Air» входят коэффициенты выражения (3.16), отражающие вклад каждой задаваемой величины в нагрев обмотки. С выхода передаточных функций сигналы поступают на сумматор «Sum1». На выходе «Sum1» формируется значение температуры меди, которое поступает на виртуальный осциллограф «Scope», регистрирующий прибор «Display» и элемент сравнения «RELE». Блоки «Kriticheskaja temperatura» и «RELE» моделируют работу теплового реле. Блок «Kriticheskaja temperatura» задает предельное значение температуры обмотки статора. Значение температуры обмотки поступает на элемент сравнения и сравнивается с предельным значением, устанавливаемым ГОСТ 183–74 в соответствии с классом изоляции. Так, например, для изоляции класса В предельное значение температуры обмотки θм=1200 С, для изоляции класса F – θм=1400 С, для изоляции класса H – θм=1650 С. Если значение температуры обмотки больше предельного, то на выходе элемента сравнения появляется сигнал, который отображается на индикаторе.
Развернутая структурная схема блока «Poteri» представлена на рисунке 3.2. Она состоит из 20 блоков: «P2», «KPD», «cos(fi)», «Tok statora», «Poteri v medi», «Tok rotora», «Poteri v rotore», «Summarnye poteri», «Dobavochnye poteri», «Mehanicheskie poteri», «Ground», «Relational operator», «Product1», «Sum3», «Sum4», «Sum5», «Gain1», «Gain2», «Pm», «Pst».
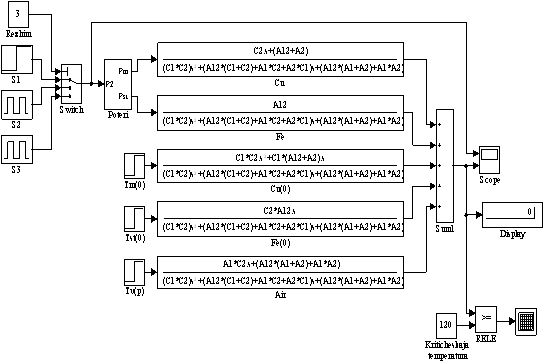
![]() Рисунок 3.1 – Структурная схема модели для определения температуры меди
Рисунок 3.1 – Структурная схема модели для определения температуры меди
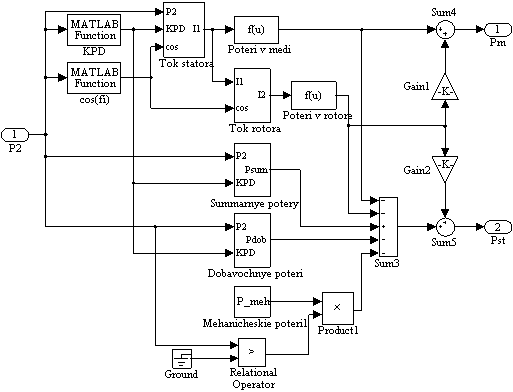
Рисунок 3.2 – Развернутая схема подсистемы «Poteri»
Поясним назначение каждого из блоков.
Блоки «KPD» и «cos(fi)» представляют собой блоки задания функций MatLab, в которых производится кубическая сплайн-интерполяция дискретных значений коэффициента полезного действия η и коэффициента мощности cosφ для определения их величин при произвольном значении нагрузки в интервале 0,25∙Р2 ÷ 1,25∙Р2. В тексте m-файла (см. Приложение А) задаются векторы значений η, cosφ и P2. Дискретные значения η и cosφ берутся из справочных материалов [17]. По этим значениям MatLab строит функцию, состоящую из отрезков кубических полиномов, так, что каждый отрезок проходит через три узловые точки. Результат интерполяции в узловых точках имеет непрерывные первую и вторую производные. Интерполяция реализуется функцией spline (P_2, cosf, P2), где P_2 – идентификатор вектора значений P2, cosf – идентификатор вектора значений коэффициента мощности, Р2 – текущее значение мощности для которого необходимо определить cosφ. На рисунке 3.3 приведен график, полученный сплайн-интерполяцией дискретных значений η, приведенных в таблице 3.1, для двигателя марки 4А132М2У3. Крестиками на графике обозначены узловые точки.
Таблица 3.1 – Значения η и cosφ для двигателя марки 4А132М2У3
| Р2/Р2ном | 0,25 | 0,5 | 0,75 | 1 | 1,25 |
| Р2, кВт | 2,75 | 5,5 | 8,25 | 11 | 13,75 |
| η, % | 80 | 87 | 88 | 88 | 87 |
| cosφ | 0,65 | 0,82 | 0,87 | 0,9 | 0,9 |
Аналогично интерполируются значения коэффициента полезного действия. На рисунке 3.4 приведен график, полученный сплайн-интерполяцией дискретных значений cosφ, приведенных в таблице 3.1, для двигателя марки 4А132М2У3. Узловые точки обозначены крестиками.
Рисунок 3.3 – График зависимости η от нагрузки P2, полученный сплайн-интерполяцией
Блок «P2» (см. рисунок 3.2) обозначает вход подсистемы, блоки «Pm» и «Pst» – выходы.
Блоки «Poteri v medi» и «Poteri v rotore» представляют собой блоки задания алгебраических функций и служат для определения потерь в меди и роторе по выражениям (2.98)
![]()
и (2.101)
![]() .
.
Блок «Mehanicheskie poteri» представляет собой источник постоянного воздействия с величиной Pмех. Он предназначен для моделирования механических потерь в двигателе. Блоки «Ground», «Relational operator» и «Product1» служат для того, чтобы при отсутствии нагрузки Р2 механические потери Pмех были равны нулю. Величина нагрузки Р2 на элементе сравнения «Relational operator» сравнивается с нулевым значением. Если нагрузка равна нулю, то на выходе элемента сравнения сигнал отсутствует, если не равна нулю, то на выходе элемента сравнения появляется единица. Блок «Product1» перемножает мощность на валу с выходным значением элемента сравнения. При умножении Рмех на единицу на выходе блока «Product1» имеем величину механических потерь. При умножении Рмех на ноль на выходе блока «Product1» сигал равен нулю.
Блоки «Gain1» и «Gain2» имеют коэффициент усиления, равный A_rot и B_rot соответственно, и обеспечивают умножение значения потерь в роторе Pрот на коэффициенты, присутствующие в выражениях (2.18)
![]()
и (2.19)
![]() .
.
Коэффициенты усиления A_rot и B_rot рассчитываются в теле m-файла.
Подсистема «Tok statora» рассчитывает значение тока статора по выражению (2.100)
 .
.
Структурная схема подсистемы приведена на рисунке 3.5.
В блоке «Tok» (см. рисунок 3.5) значение мощности на валу P2 делится на фазное напряжение U1 и количество фаз статора m1 в соответствии с выражением (2.100). Блок «Product2» делит полученное промежуточное значение на коэффициент мощности cosφ и коэффициент полезного действия η. В итоге на выходе получаем значение тока статора I1.
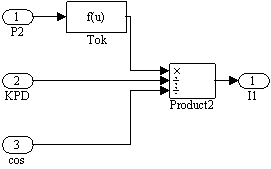
Рисунок 3.5 – Структурная схема подсистемы «Tok statora»
Подсистема «Tok rotora» (см. рисунок 3.2) рассчитывает значение тока ротора по выражению (2.106)
![]() .
.
Структурная схема подсистемы приведена на рисунке 3.6.
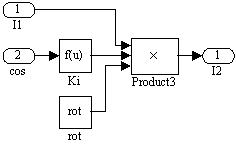
Рисунок 3.6 – Структурная схема подсистемы «Tok rotora»
Блок «Ki» (см. рисунок 3.6) представляет собой блок задания алгебраической функции, в котором рассчитывается коэффициент, учитывающий влияние тока намагничивания и сопротивления обмоток на отношение I1/I2, по выражению (2.107)
![]() .
.
В блоке «Rot» задается величина коэффициента приведения токов νi, рассчитанного в теле m-файла по выражению (2.108)
 .
.
Блок «Product3» перемножает значения тока статора I1, коэффициента приведения токов νi и коэффициента ki, учитывающего влияние тока намагничивания и сопротивления обмоток на отношение I1/I2. В итоге на выходе имеем значение тока ротора I2.
Подсистема «Summarnye poteri» (см. рисунок 3.2) рассчитывает суммарные потери в двигателе по выражению (2.110)
 .
.
Структурная схема подсистемы приведена на рисунке 3.7.
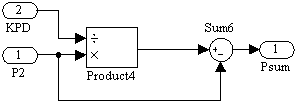
Рисунок 3.7 – Структурная схема подсистемы «Summarnye poteri»
Блок «Product4» делит значение мощности на валу двигателя P2 на коэффициент полезного действия η. На выходе «Product4» получается значение потребляемой из сети мощности P1, из которого в сумматоре «Sum6» вычитается величина мощности на валу двигателя Р2. В итоге на выходе подсистемы имеем значение суммарных потерь в двигателе РΣ.
Подсистема «Dobavochnye poteri» рассчитывает величину добавочных потерь в двигателе по выражению (2.113)
 .
.
Структурная схема подсистемы приведена на рисунке 3.8.
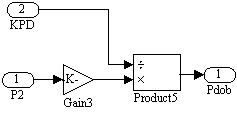
Рисунок 3.8 – Структурная схема подсистемы «Dobavochnye poteri»
Усилительный элемент «Gain3» имеет коэффициент усиления равный 0,005. Значение с выхода усилительного элемента в блоке «Product5» делится на величину коэффициента полезного действия η. В итоге на выходе подсистемы имеем значение добавочных потерь в двигателе Рдоб.
Структурная схема для определения температуры стали приведена на рисунке 3.9. Практически все блоки идентичны блокам структурной схемы для определения температуры меди, отличие состоит в том, что в блоки передаточных функций «Cu», «Fe», «Cu(0)», «Fe(0)» и «Air» входят коэффициенты выражения (3.17).
Оценить точность полученной модели можно, сравнив результаты моделирования с данными, полученными опытным путем. Но проведение опытов является невозможным из-за отсутствия достаточной материально-технической базы, а так же из-за малого количества времени, отведенного на выполнение дипломного проекта. Приводимые в известной литературе кривые изменения температуры двигателя показывают лишь характер ее изменения и никакой точной информации не несут. Поэтому, единственным доступным в данной ситуации способом оценки достоверности результатов моделирования является сравнение их с результатами, полученными другими существующими методами тепловых расчетов. Так, например, при тепловом расчете асинхронного двигателя хакрытого исполнения мощностью Р2=7,5 кВт с синхронной скоростью n1=1500 об/мин в установившемся режиме по методике приведенной в [13] превышение температуры обмотки равно Δθм=75,30С. При расчете с помощью приведенной выше модели для того же двигателя получено значение Δθм=73,50С. Таким образом разница полученных значений превышения температуры обмотки статора составляет 1,80С, то есть 2,4%, что вполне удовлетворительно.
Похожие работы

... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...
... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
за счет снижения газоудерживающей способности теста. Процесс уплотнения поверхностного слоя тестовой заготовки приводит к ускоренному повышению температуры тестовой заготовки, т.е. кривая скорости изменения температуры поверхностного слоя начинает расти. Рост кривой продолжается до точки “г”, после прохождения которой начинается процесс интенсивного газовыделения, связанного с резким снижением ...
0 комментариев