Навигация
Характеристика об'єкта керування, опис пристрою й роботи САР, складання її функціональної схеми. Принцип автоматичного керування й вид системи
13341
знак
2
таблицы
6
изображений
1. Характеристика об'єкта керування, опис пристрою й роботи САР, складання її функціональної схеми. Принцип автоматичного керування й вид системи
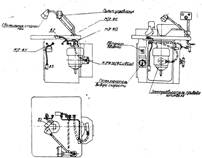
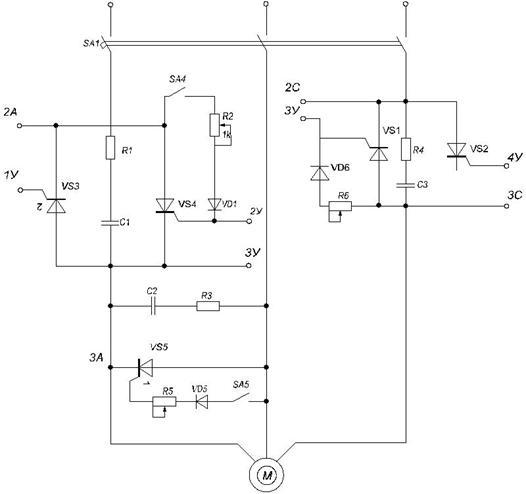
САР частоти обертання приводного електродвигуна стенда для обкатування ДВС складається з об'єкта керування й регулятора.
Об'єктом керування (ОУ) розглянутої САР є асинхронний електродвигун з фазним ротором. Регульованою величиною є частота обертання вала двигуна ?. Метою керування є підтримка частоти обертання ? на заданому рівні шляхом зміни опору в ланцюзі ротора асинхронного електродвигуна. Керуючим впливом на ОУ є кут повороту вала, приєднаного до реостата, ?р. Основний вплив, що обурює, зміна моменту опору Мс на валу двигуна.
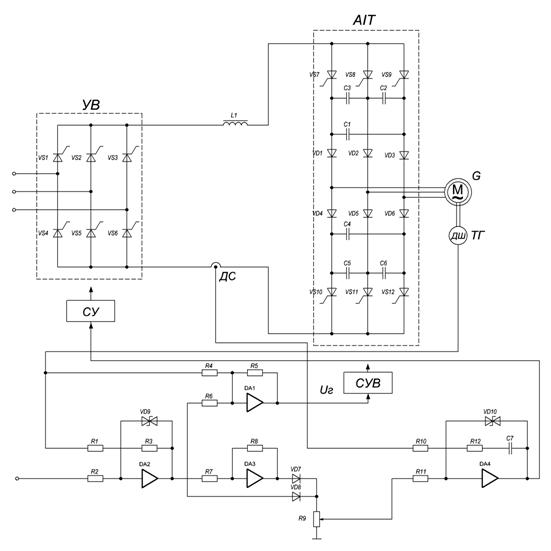
1. Датчиком (Д) є тахогенератор постійного струму Uд. Вхідний сигнал для тахогенератора - частота обертання вала двигуна, вихідний сигнал - напруга Uд датчика.
За датчиком системи є опір R1. сигнал - це величина напруги U3, що у певному масштабі відповідає заданому значенню частоти обертання вала ?.
2. Диференціальний підсилювач (ДУ) 2 виконує так само й функції пристрою, що порівнює (СУ), порівняння (вирахування) вхідних сигналів і посилення їхньої різниці. На вхід підсилювача надходять напруги датчика UЗ , напруга з тахогенератора UД і Uос пристрою зворотного зв'язку. Вихідний сигнал підсилювача - напруга Uу, подаване на електродвигун 3.
3. Виконавчий пристрій являє собою виконавчий механізм, що складається з електродвигуна (Дв) 3 і редуктори (Р) 4. Вхідний сигнал для електродвигуна - напруга Uу, вихідний сигнал - кут повороту ?дв вала електродвигуна. Вхідний сигнал для редуктора - ?дв, вихідний сигнал - кут повороту вала ?р редуктора.
4. Пристрій місцевого зворотного зв'язку (УОС) виконано у вигляді датчика (6). Вхідний сигнал УОС - кут повороту ?р, вихідний сигнал - напруга Uос.
5. Регулювальним органом (РО) є рідинної реостат 5 який змінює опір у роторі електродвигуна 7. Вхідний сигнал - кут повороту ?р, вихідний сигнал - опір Rф.
На підставі вищевикладеного складена функціональна схема системи, що наведена на мал.2.
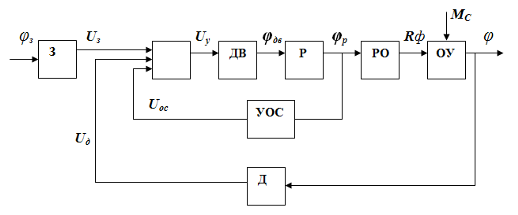
Малюнок 2 Функціональна схема САР частоти обертання приводного електродвигуна стенда для обкатування ДВС.
Система працює в такий спосіб:
У сталому режимі при рівності частоти обертання ? ротора двигуна заданої ? з , напруги Uз ,Uос ,Uд взаємно компенсуються й вихідну напругу UУ на ДУ дорівнює 0. При відхиленні частоти обертання від заданої, наприклад, через зміну моменту на валу ДВС Мс, напруга на виході датчика Uд змінюється, з'явиться різниця напруг у результаті чого на виході ДУ з'явиться напруга UУ відмінне від нуля. Напруга UУ подається на електродвигун. Двигун через редуктор змінює положення рідинного опору, тим самим, збільшуючи або зменшуючи частоту обертання вала ротора, повертаючи її до заданого значення. Одночасно вихідний вал редуктора переміщає рухливий контакт датчика місцевого зворотного зв'язку. Вихідна напруга Uос якого подається на ДУ . За рахунок місцевого зворотного зв'язку забезпечується пропорційна залежність між напругою Uд і кутом повороту вала редуктора.
У результаті розгляду пристрою й роботи системи можна зробити наступні виводи:
У системі реалізований принцип керування по відхиленню (помилці).
Система є стабілізуючою.
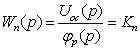
2. Складання структурної схеми системи
Для складання структурної схеми одержимо передатні функції всіх елементів системи.
Рівняння об'єкта керування:
![]()
Зображення Лапласа цього рівняння:
![]()
Передатна функція по керуючому впливі:
![]()
![]()
По впливі, що обурює:
![]()
Датчик частоти обертання (тахогенератор):
![]()
![]()
3. Датчик:
![]()
![]()
Диференціальний підсилювач:
![]()
![]()
![]()
![]()
![]()
![]()
Редуктор:
![]()
![]()
Пристрій зворотного зв'язку:
![]()
Регульований рідинної реостат:
![]()
![]()
Структурна схема системи показана на мал. 3
Малюнок 3 Структурна схема САР частоти обертання приводного електродвигуна стенда для обкатування ДВС.
Тому що датчик є безінерційним його коефіцієнт передачі ![]() повинен бути таким, що дорівнює коефіцієнту передачі
повинен бути таким, що дорівнює коефіцієнту передачі ![]() датчика, оскільки задане UЗ і дійсне U напруги повинні відніматися в одному масштабі. Тому для наочності дослідження ці коефіцієнти
датчика, оскільки задане UЗ і дійсне U напруги повинні відніматися в одному масштабі. Тому для наочності дослідження ці коефіцієнти ![]() можна перенести за СУ й уважати, що із заданої напруги UЗ безпосередньо віднімається обмірюване датчиком і формується сигнал помилки
можна перенести за СУ й уважати, що із заданої напруги UЗ безпосередньо віднімається обмірюване датчиком і формується сигнал помилки ![]() .
.
Похожие работы
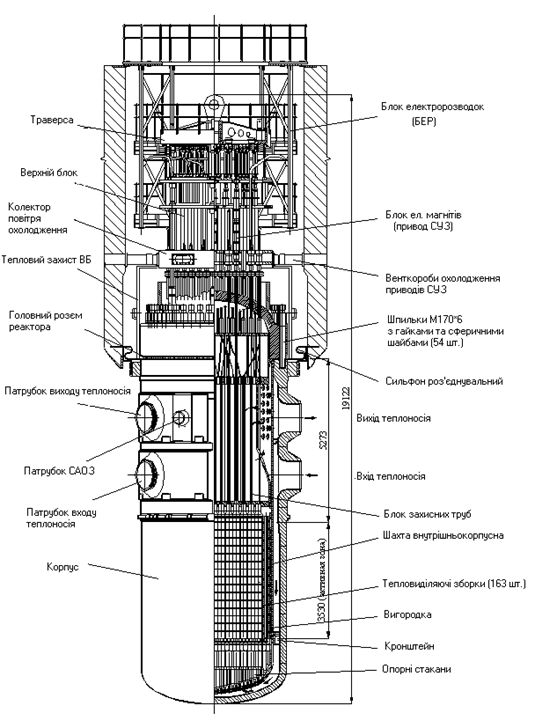
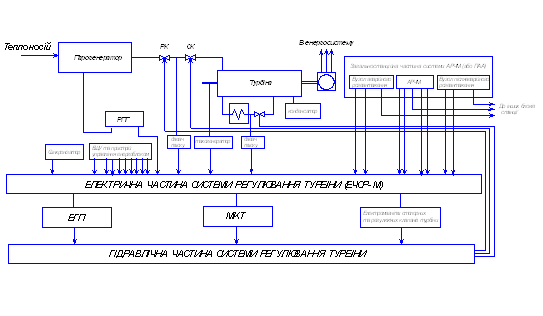
... , звитих в плоскі спіралі. Кінці спіралей приварені до трьох роздаючих і до трьох колекторних труб. 2. Призначення, склад, технічні характеристики системи автоматичного регулювання 2.1 Призначення системи автоматичного регулювання Система автоматичного регулювання (САР) турбіни виконується електрогідравлічною і структурно складається з електричної і гідравлічної частин, робота яких взає ...
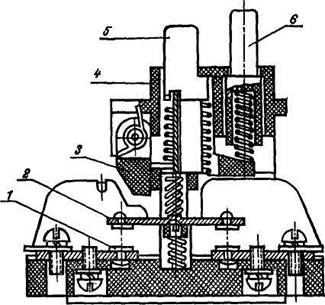
... потребує заміни елементів, як у запобіжниках при згорянні плавкої вставки. При необхідності гальмування двигуна після його вимкнення з мережі застосовують динамічне гальмування. Динамічне гальмування асинхронного двигуна з короткозамкненим ротором реалізується внаслідок підмикання обмоток статора до джерела постійного струму через додатковий резистор Rn (рис. 3). Гальмування двигуна здійснюється ...
... -контакторна апаратура, що працює дуже інтенсивно (до 600 включень в годину) вимагає постійного догляду, і має низьку надійність, що наводить до простоїв устаткування. 1.3 Система керування електроприводом стрічкового конвеєра З аналізу попередніх розділів виходить, що основними засобами регулювання швидкості магістральних конвеєрів при пуску (за умови вживання асинхронних двигунів з фазним ...
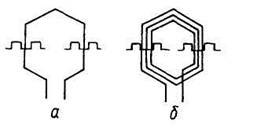
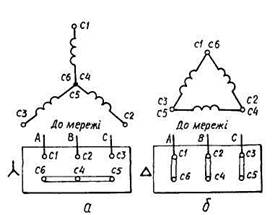
... за допомогою конденсаторів: а і б - при виведених на корпус трьох кінцях обмоток; в - при виведених на корпус шести кінцях обмоток Трифазний асинхронний двигун без зміни його конструкції і обмотувальних даних може бути використаний для роботи в однофазному режимі. Така необхідність виникає часто там, де немає трифазної мережі. При включенні трифазних асинхронних електродвигунів в однофазну ...
0 комментариев