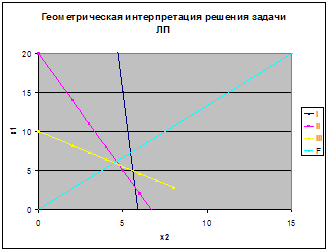
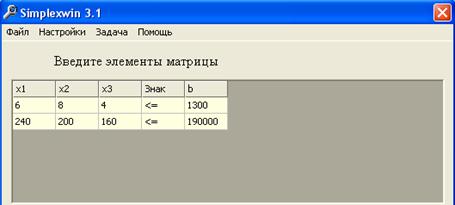
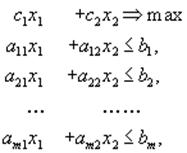
Математическая модель задачи линейного программирования
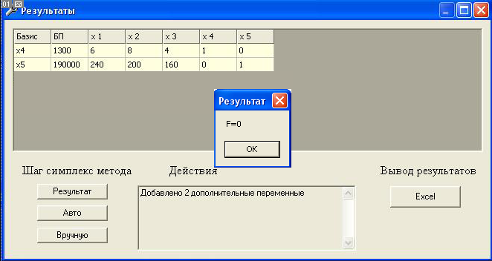
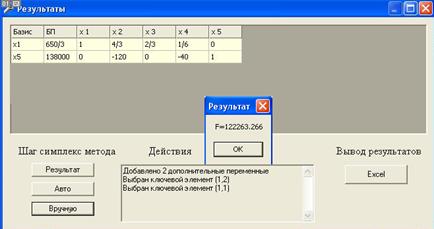
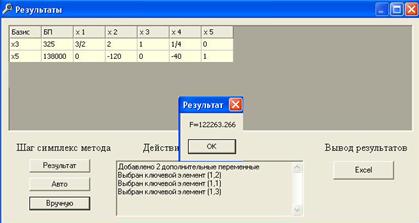
Метод допустимого базиса
Решение двойственной задачи
Метод Гомори
Метод ветвей и границ
Метод Баллаша
Метод поиска по координатной сетке с постоянным шагом и метод случайного поиска. Сравнение результатов вычислений
Метод кубической аппроксимации
Лященко И.Н. Линейное и нелинейное программирования / И.Н.Лященко, Е.А.Карагодова, Н.В.Черникова, Н.З.Шор. – К.: «Высшая школа», 1975, 372 с
Навигация
Метод поиска по координатной сетке с постоянным шагом и метод случайного поиска. Сравнение результатов вычислений
Линейное и нелинейное программирование
23672
знака
25
таблиц
23
изображения
3.1.2 Метод поиска по координатной сетке с постоянным шагом и метод случайного поиска. Сравнение результатов вычислений
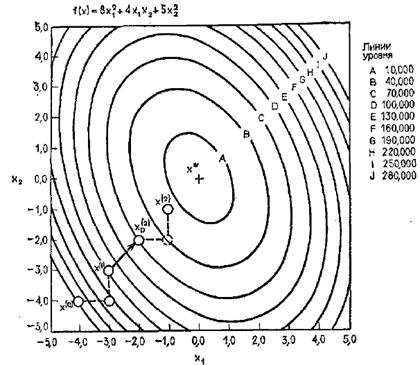
Метод поиска глобального минимума, называемый методом поиска по координатной сетке, является надежным, но применим только для задач малой размерности (n<4). Неправильный выбор начального шага сетки может привести к тому, что в действительности один из локальных минимумов может быть принят как глобальный. Из всех значений целевой функции, вычисленных в узлах координатной сетки, выбирается минимальное. Результат: число испытаний 905, f(X*) = -2.500, X*=(-0.500; 2.000)
Метод случайного поиска характеризуется намеренным введением элемента случайности в алгоритм поиска. Этот метод предполагает наличие генератора случайных чисел, обращаясь к которому, в любой нужный момент времени можно получить реализацию случайного вектора с заданным законом распределения. Результат: число испытаний 299, f(X*) = -2.469, X*=(-0.677; 2.173).
Расчет в системе MathCAD: f(X*) = -2.500, X*=(-0.500; 2.000)


Как видим, метод случайного поиска сократил число испытаний на 66%, при этом относительная погрешность составляет 1%. Т.е. мы достигли значительного сокращения вычислений с небольшой относительной погрешностью.
3.2 Задача одномерной оптимизации функции
3.2.1 Постановка задачи одномерной оптимизации функции
Задание для нахождения одномерного локального экстремума функции (одномерная оптимизация) состоит в том, чтобы выполнить поиск минимума заданной функции методом дихотомии (3-4 итерации), уточнить интервал поиска методом Фибоначчи (3 итерации) и завершить поиск методом кубической аппроксимации.
![]()
3.2.2 Метод дихотомии
![]()
Итерация 1
![]()
![]()
![]()
![]()
![]()
![]()
Итерация 2
![]()
![]()
![]()
![]()
![]()
![]()
Итерация 3
![]()
![]()
![]()
![]()
![]()
![]()
Итерация 4
![]()
![]()
![]()
![]()
![]()
После четырех итераций получим:![]()
![]()
3.2.3 Метод Фибоначчи
![]()
![]()
Итерация 1 ![]()
![]()
![]()
![]()
![]()
Итерация 2 ![]()
![]()
![]()
![]()
![]()
Итерация 3 ![]()
![]()
![]()
![]()
![]()
![]()
Итерация 4 ![]()
Поиск окончен. Длина интервала: ![]()
![]()
Похожие работы

... разрабатываются методы отыскания экстремальных значений целевой функции среди множества ее возможных значений, определяемых ограничениями. Наличие ограничений делает задачи математического программирования принципиально отличными от классических задач математического анализа по отысканию экстремальных значений функции. Методы математического анализа для поиска экстремума функции в задачах ...
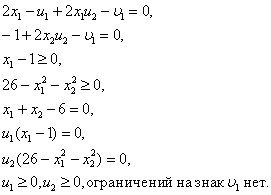

... нахождение точки Куна—Таккера обеспечивает получение оптимального решения задачи нелинейного программирования. Теорему 2 можно также использовать для доказательства оптимальности данного решения задачи нелинейного программирования. В качестве иллюстрации опять рассмотрим пример: Минимизировать при ограничениях С помощью теоремы 2 докажем, что решение является оптимальным. Имеем Так ...

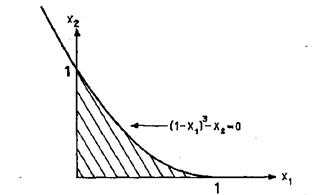
... гиперповерхность наивысшего (наименьшего) уровня: f (x1, x2, …, xn) = h. Указанная точка может находиться как на границе области допустимых решений, так и внутри неё. Процесс нахождения решения задачи нелинейного программирования с использованием ее геометрической интерпретации включает следующие этапы: 1. Находят область допустимых решений задачи, определяемую соотношениями (если она пуста, ...
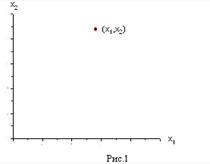
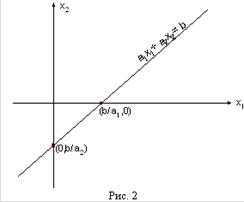
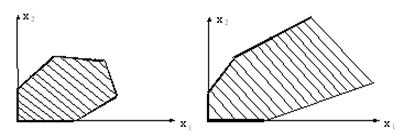
... лучей, исходящих из одной точки, называется многогранным выпуклым конусом с вершиной в данной точке. 1.4 Математические основы решения задачи линейного программирования графическим способом 1.4.1 Математический аппарат Для понимания всего дальнейшего полезно знать и представлять себе геометрическую интерпретацию задач линейного программирования, которую можно дать для случаев n = 2 и n = ...
0 комментариев