Навигация
Построение плана механизма
23555
знаков
8
таблиц
1
изображение
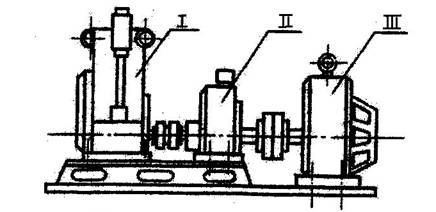
1.1 Построение плана механизма
План механизма строим для тринадцати положений. Построение начнём с выбора длины отрезка кривошипа (54мм), обозначим через О1А длину отрезка кривошипа в миллиметрах а через lO1A - истинную длину кривошипа в метрах, составив отношение истинной длины к длине отрезка получим значение масштабного коэффициента.
![]() (1.1)
(1.1)
![]()
По значению ml находим :длины отрезков остальных звеньев механизма в миллиметрах. Для этого истинные длины звеньев в метрах делим на масштаб ml.
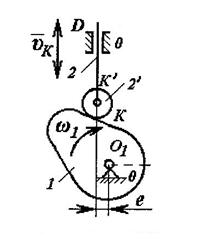
Отрезком О1А, как радиусом, изображаем окружность с центром в точке О1.
Путем вращения О1А отрезка находим два крайних (мертвых) положения механизма. В мертвых положениях кривошип и примыкающий к нему шатун находятся на одной линии.
После нахождения мертвых положений механизма и определения направления вращения кривошипа строим плана механизма.
За исходное нулевое выбираем первое мертвое положение механизма. Последующие положения строим через 30° поворота кривошипа.
1.2 Построение плана аналогов скоростей
Определим скорость точки А. Зная частоту вращения кривошипа О1А и его длину, определим скорость точки А, используя формулу:
![]() (1.2)
(1.2)
![]() (1.3)
(1.3)
где n1 – частота вращения кривошипа.
![]() =6,5 (рад/с)
=6,5 (рад/с)
![]()
Скорость точки А во всех положениях механизма постоянна, и графически выражается вектором ра.
Определим масштабный коэффициент плана скоростей.
![]() (1.4)
(1.4)
где ра – отрезок на плане скоростей определяющий скорость точки А, мм.
![]()
Определим скорость точки В. Для этого рассмотрим её движение относительно точек А и О2 . Получаем систему уравнений.
 (1.5)
(1.5)
где: VA - скорость точки А.
VBA – скорость точки В относительно точки А.
VВО2 – скорость точки В относительно точки О2.
VО2 – скорость точки О2, равна, 0 т.к. данная точка неподвижна.
Решая графическим методом систему уравнений (5), получим скорость точки В, которая графически выражается вектором рв.
Для определения скорости точки С, рассмотрим её движение относительно точек В и Сх . Получаем систему уравнений.
 (1.6)
(1.6)
где: VВ - скорость точки В.
VСВ – скорость точки С относительно точки В.
VССх – скорость точки С относительно точки Сх.
VСх – скорость точки К, равна, 0 т.к. данная точка неподвижна.
Решая графическим методом систему уравнений (1.6), получим скорость точки С, которая графически выражается вектором рс.
Отрезок рs2 скорости точки S2 находим по принципу подобия.. Длину отрезка ps2 определяем из пропорции.
![]() (1.7)
(1.7)
Аналогично находим скорость точки ps4
![]() (1.8)
(1.8)
Значения аналогов скоростей рs2 , ps4 , заносим в таблицу 2.
Таблица 2. Значения аналогов скоростей рs2 , ps4.
| Положение механизма. | 1 | 2 | 3 | 4 | 5 | 6 | 6’ | 7 | 8 | 9 | 10 | 11 |
| ps2 | 75 | 71 | 70 | 76 | 90 | 110 | 0 | 110 | 103 | 98 | 93 | 84 |
| ps4 | 42 | 49 | 62 | 93 | 117 | 81 | 0 | 106 | 118 | 96 | 68 | 47 |
Похожие работы


... По формуле 106 определяем уравновешивающий момент, Нм: МУР=4670,30,064=298,9 Нм Сравним полученные обоими методами уравновешивающие моменты, %: , (108) 7. Определение коэффициента полезного действия машинного агрегата Машинный агрегат состоит из ДВС, зубчатого редуктора и генератора электрического тока, соединенных последовательно. ДВС состоит из кривошипно-ползунного механизма и ...
... . Расхождение между полученным по графику и рассчитанным в тепловом расчете значениями : ; <. 5 Расчет деталей на прочность 5.1 Поршень Таблица 5.1― Размеры элементов поршневой группы Элементы поршневой группы Расчетные зависимости для карбюраторного двигателя Значения размеров, мм Высота поршня 1,05∙D 104 Расстояние от верхней ...
... 85 231,9 149,4 19,7 10 6018 83,4 248,4 132,4 20,7 11 6600 77,5 269 112,2 20,8 По полученным значениям производим построение внешней скоростной характеристики. 3 Динамический расчет КШМ двигателя 3.1 Расчет сил давления газов Сила давления газов, Н: (3.1) где – атмосферное давление, МПа; , – абсолютное и избыточное давление газов над поршнем в рассматриваемый ...

... двигателя Динамический расчет кривошипно-шатунного механизма выполняется с целью определения суммарных сил и моментов, возникающих от давления газов и от сил инерции. Результаты динамического расчета используются при расчете деталей двигателя на прочность и износ. В течение каждого рабочего цикла силы, действующие в кривошипно-шатунном механизме, непрерывно изменяются по величине и направлению. ...
0 комментариев