Фаза отключения
Проектирование кинематической схемы выключателя с приводом
Динамический анализ механизма
Построение фазовой траектории контактных стержней в фазе отключения
Определение времени отключения
Приведение сил статического сопротивления к штоку двигателя
Выбор силовой характеристики двигателя
Навигация
Проектирование кинематической схемы выключателя с приводом
Проектирование масляного выключателя
28025
знаков
9
таблиц
4
изображения
3.2 Проектирование кинематической схемы выключателя с приводом
Для построения кинематической схемы всего механизма масляного выключателя, четырёхзвенник О1А1В1О2 следует повернуть на (90+γ) градусов против часовой стрелки (рис 3.2), где
γ=arctg(r/Lш) (3.12)
где r- параметр, r=aa-aB=80-50=30 (мм),
γ=arctg(30/140)=12.5°.
Коромысло ВO2С будем проектировать т.о., чтобы в крайних положениях прямая O2С образовывала с горизонталью одинаковые углы ψ0=0.5*(ψ2-ψ1). Тогда зависимость между длиной второго плеча коромысла Rc и отношением длин плеч коромысла выключателя EO3M:
 (3.13)
(3.13)
 (мм);
(мм);
где: l1- длина DО3, мм;
L – длина ЕО3 мм;
Rc- плечо коромысла, Rc=RB=67 (мм);
Длина тяги CD практически не влияет на кинематику системы, поэтому зададим её такой, чтобы схему механизма удобно было располагать на чертеже. При определении параметров отключающей и буферной пружин считалось, что скорость контактов стержня практически совпадает с вертикальной проекцией скорости шарнира Е. Это условие выполняется достаточно точно во всех точках траектории движения шарнира при малом угле полного поворота коромысла 2θ0. Однако очень малый угол приводит к значительному увеличению размера L и соответственно габаритов выключателя. Исходя из этих соображений, зададим 2θ0=45°, тогда можем найти L:
 (3.14)
(3.14)
L=0.5*280/sin(22.5°)=360 (мм).
Длину рычага l2 определяют из соотношения ![]() =L/l2, где
=L/l2, где
α- коэффициент относительной длины рычага коромысла;
α=0.4;
l2=0.4*360=150 (мм).
4. Кинематический анализ механизма
Основной задачей кинематики механизма является изучение движения его звеньев; при этом действующие на звенья силы не учитываются.
Определим отношение скоростей точек C,D, E, М, К коромысла выключателя к скорости штока двигателя в зависимости от положения штока.
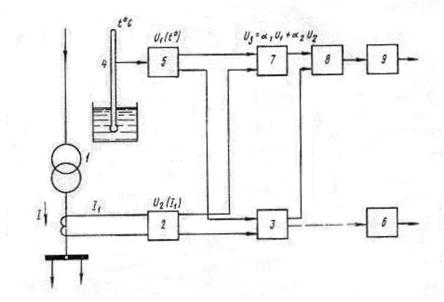
Разделим дугу, описываемую точкой А кривошипа О1А при переходе механизма из положения «отключено» в положение «включено» на шесть равных частей (рис. 4.1). Вычертим механизм в крайних и пяти промежуточных положениях, соответствующих семи положениям точки А. Дополнительное восьмое положение механизма получаем, когда подвижные контакты касаются неподвижных контактов(номер этого положения 6к). Для нахождения этого положения механизма, от нижнего (включённого) положения (точка Е2, рис. 4.1) откладываем перемещение подвижного контакта равное hk.
Для решения задачи скоростей, пронумеровываются звенья механизма, начиная с кривошипа О1А. Определяется вид их мгновенного движения.
Затем в каждом из положений механизма определяем линейные скорости точек A, B, C, D, E, М, а также угловые скорости звеньев. Линейную скорость ведущего звена (шток двигателя) будем задавать постоянной и равной единице, поскольку необходимые в дальнейшем передаточные функции представляют отношения соответствующих линейных скоростей к линейной скорости ведущего звена. Таким образом полученные скорости смаштабированными в Vш раз:
Ṽi=Vi/Vш, где i- соответствующая точка механизма. При этом вертикальная проекция скорости точки А, равная скорости штока двигателя. Считается также, что вертикальные проекции скоростей точек C и D одинаковы (VCY=VDY). Расчет скоростей ведется методом мгновенного центра скоростей (МЦС). Рассмотрим положение 1 (рис. 4.1).
ṼA1=Vш/cos(φ0-φi), (4.1)
где φ0=30°; φi- угол отсчитывается от положения «отключено» (φi меняется от 0° до 60°).
VA1=1/cos(30°-0°)=1.15.
Линейная скорость точки В для 1-го положения механизма определяется с помощью МЦС. Для звена АВ МЦС точка Рк лежит на пересечении перпендикуляров к скоростям точек А и В. Зная положение МЦС находим угловую скорость:
ω21=VA1/(A1PK1*µL), (4.2)
где А1Рк1- расстояние от точки А1 до Рк1 в мм;
µL-масштаб чертежа;
ω21=1.15/230*0.002=2.5.
Скорость точки В: VB1= ω21*B1PK1*µL, (4.3)
где B1PK1- расстояние от точки В1 до МЦС в мм;
VB1=2.5*272*0.002=1.36
Коромысло ВО2С совершает вращательное движение, определим его угловую скорость:
ω31=VB1/RB (4.4)
ω31=1.36/67=0.02.
Линейная скорость точки С:
VC1=ω31*Rc (4.5)
VC1=0.02*6.7=1.36.
При принятых допущениях (вертикальные проекции скоростей точек C и D одинаковы VCY=VDY), определяем линейную скорость точки D:
VD1=VC1*cos(ψ0-ψ1)/cos(θ0-θ1), (4.6)
Углы ψ1,θ1- отсчитываются от положения «отключено»;
VD1=1.36*cos(43°-0°)/cos(22.5°-0°)=1.08.
Коромысло выключателя ЕО3М совершает вращательное движение, его угловая скорость:
ωо3=VD1/l1, (4.7)
где l1-длина DO3 в мм;
ωо3= 1.08/120=0.009.
Линейные скорости точек Е и M:
VE1=VD1*L/l1, (4.8)
VM1=VD1*l2/l1, (4.9)
где l2 – длина рычага О3М в мм;
VE1=1.08*360/120=3.24,
VM1=1.08*150/120=1.35.
Скорость точки К определим, приняв, что вертикальная проекция скорости точки Е равна скорости подвижного контакта: VK1=VE1*cos(θ0-θ1) (4.10)
VK1=3.24*cos(22.5°- 0°)=2.99.
Координаты i - ых положений штока отсчитываемые от положения «отключено» вычисляются:
Sш1=Ra*[sin(φ0)-sin(φ0-φ1)] (4.11)
Sш1=95*[sin(30°)-sin(30°-0°)=0.
Координаты Ski положений подвижного контакта методом непосредственных измерений.
Результаты занесены в таблицу 4.1, и по ним построены графики VC(Sш), VD(Sш), VE(Sш), VK(Sш), VM(Sш), Sk(Sш) (рисунки 4.2, 4.3).
Таблица 4.1. Значение передаточных функций
| № пп | ji | ψi | θi | Sшi,мм | Ski мм | Ṽ̃Ai | ṼBi | ṼCi | ṼDi | ṼEi | ṼKi | ṼMi |
| 1 | 0 | 0 | 0 | 0 | 0 | 1.15 | 1.36 | 1.36 | 1.08 | 3.24 | 3.12 | 1.35 |
| 2 | 10 | 14.3 | 7.5 | 15 | 42 | 1.06 | 1.17 | 1.17 | 1.06 | 3.18 | 3.07 | 1.33 |
| 3 | 20 | 28.6 | 15 | 31 | 90 | 1.02 | 1.09 | 1.09 | 1.05 | 3.15 | 3.04 | 1.31 |
| 4 | 30 | 42.9 | 22.5 | 47.5 | 140 | 1 | 1 | 1 | 1 | 3 | 3 | 1.25 |
| 5 | 40 | 57.2 | 30 | 64 | 180 | 1.02 | 1.07 | 1.07 | 1.05 | 3.15 | 3.04 | 1.31 |
| 6k | 47.5 | 69 | 37 | 76 | 228 | 1.05 | 1.11 | 1.11 | 1.055 | 3.165 | 3.06 | 1.32 |
| 6 | 50 | 71.5 | 37.5 | 80 | 232 | 1.06 | 1.13 | 1.13 | 1.06 | 3.18 | 3.07 | 1.33 |
| 7 | 60 | 86 | 45 | 95 | 280 | 1.15 | 1.36 | 1.36 | 1.08 | 3.24 | 3.12 | 1.35 |
Похожие работы



... BК £ Iтерм2 ×tтерм Выбор разъединителей. Разъединители используют для включения и отключения обесточенных участков электрической цепи под напряжением. Выбор разъединителей производится по тем же параметрам что и выключатели, кроме условия по отключающей способности. [3] В соответствии с перечисленными условиями (1.1 - 1.5) выбираем на стороне 10 кВ разъединитель РЛНД - 10/200 ...
... ОПН. ОПН устанавливается вместо РВ на опорах ВЛ в местах с ослабленной изоляцией, в начале и конце защищенного подхода перед подстанцией на опорах вокруг пересечений ВЛ, на длинных переходах ВЛ и т.д. На первый взгляд применение ОПН представляется простым и эффективным решением задачи по ограничению перенапряжений. Исключение из ограничителя коммутирующих искровых промежутков повышает надежность ...
... либо полным, активным или реактивным током. Расчет нагрузок городской сети включает определение нагрузок отдельных потребителей (жилих домов, общественных зданий, коммунально-бытовых предприятий и т.д.) и элементов системы электроснабжения (распределительных линий, ТП, РП, центров питания и т.д.) Расчётную нагрузку грепповых сетей освещения общедомовых помещений жилых зданий (лестничных клеток, ...
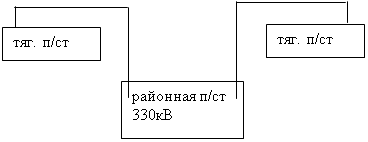
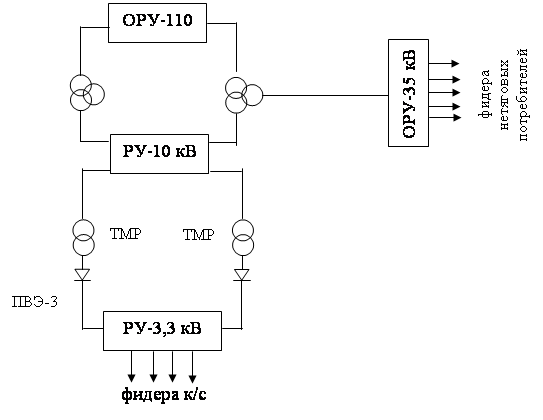
... аварийного режима к.з. 1.2 Структурная схема тяговой подстанции Долбина В данном дипломном проекте предлагается рассмотреть модернизацию тяговой промежуточной подстанции с питающим напряжением 110 кВ. В Белгородской дистанции электроснабжения имеется 9 тяговых подстанций постоянного тока, 8 из которых питаются от ЛЭП-110 кВ, в том числе и тяговая подстанция «Долбина». Тяговая подстанция ...
0 комментариев