Навигация
Виведення рівняння перетворювача
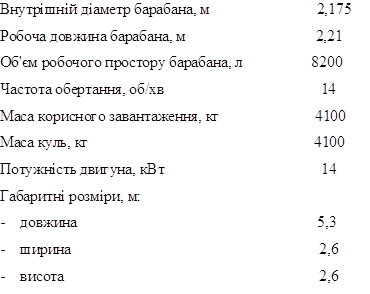
30202
знака
3
таблицы
10
изображений
3.3 Виведення рівняння перетворювача
![]() (3.14)
(3.14)
де k – коефіцієнт, яким визначається чутливість давача;
Е – діюче значення наведеної в приймальній котушці ЕРС.
![]() (3.15)
(3.15)
де І10 – (в даному виразі) діюче значення струму через котушку збудження
Множник![]() є однаковим для обох котушок, оскільки збільшення частоти для другого каналу компенсується зменшенням числа витків котушок.
є однаковим для обох котушок, оскільки збільшення частоти для другого каналу компенсується зменшенням числа витків котушок.
![]()
Отже
![]() (3.16)
(3.16)
З даного виразу можна зробити такі висновки:
- Сигнал на виході перетворювача зсунутий відносно вхідного на кут 180о (p)
- Напруга на виході має нелінійну залежність від переміщення (гіперболла)
Згідно даної рівності будуємо залежність ЕРС від відстані між котушками:
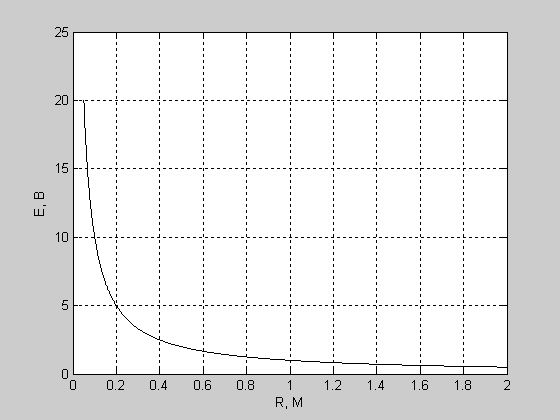
Рис. 3.2 – Передавальна характеристика ВП
Як уже говорилося, вихідний сигнал давача являється АМ сигналом з великим рівнем несучої. на наступному рисунку зображено вихідний сигнал перетворювача у випадку, коли відстань між котушками змінюється за законом R=0.5×0.02cos(2p×120×t) (частота коливань рівна 120Гц, амплітуда коливань рівна 2см, початкова відстань між котушками 50см).
Для подальшої обробки можна застосувати схему, що включає в себе підсилювач з високоомним входом (не менш як 106 Ом), детектор згинаючої, диференціюючий пристрій (щоб усунути постійну складову).
![]()
|
|
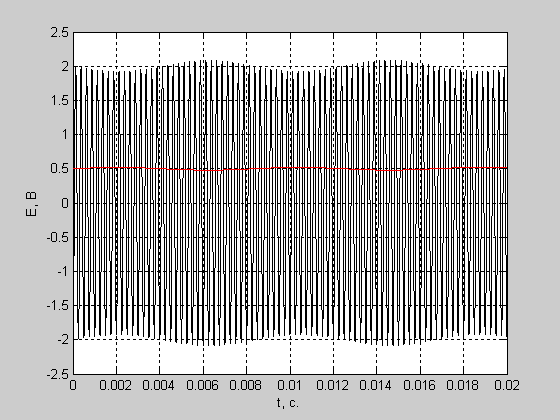
Рис 3.3 – Вихідний сигнал давача
1 – вхідний сигнал;
2 – вихідний сигнал.
3.4 Обчислення похибки вимірювання
Похибка вимірювання спричинена нелінійністю передавальної характеристики давача. В залежності від початкової відстані між котушками чутливість давача змінюється (на графіку вона визначається дотичною в конкретній точці). Тому даний ВП може коректно працювати лише при невеликих (відносно невеликих) змінах відстані між котушками.
Для обчислення похибки розглянемо ділянку передавальної характеристики при відстані між котушками 0,4±0,05(м).

Рис. 3.4 – Ділянка передавальної характеристики перетворювача
1 – реальна характеристика;
2 – ідеальна характеристика.
За допомогою методу найменших квадратів [4] визначимо, якою повинна бути ідеальна характеристика перетворювача в даній точці.
В результаті виконання математичних дій [4] отримаємо наступне рівняння ідеального перетворювача:
Е= -6.3093 ×R+ 5.0369 (3.17)
Отже чутливість ідеального перетворювача в даній точці рівна 6,45 В/м
Максимальне значення абсолютної похибки рівне: Dmax= 0.0285В.
Відносну похибку вимірювання знаходимо за виразом:
 (3.18)
(3.18)
де ![]() - дійсне значення вихідної величини (ЕРС) в даній точці (0,4м).
- дійсне значення вихідної величини (ЕРС) в даній точці (0,4м).

Отже при початковій відстані між котушками 0,4м відносна похибка вимірювань рівна 1,14%.
Розрахунок параметрів ВП а також абсолютної похибки вимірювання був проведений з використанням середовища MATLAB 6.5. текст програми наведений в додатку А.
3.5 Обчислення температурної похибки роботи ВП.
Оскільки проектований ВП повинен працювати в широкому діапазоні температур (від -45 до +45 оС) то значну долю від загальної похибки вимірювання буде складати температурна похибка. Вона виникає внаслідок збільшення магнітної проникності феритового осердя при збільшенні температури.
Визначимо вплив зміни температури на магнітні властивості осердя:
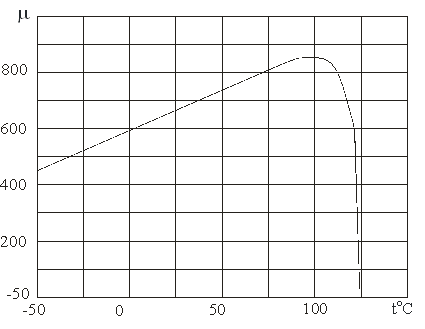
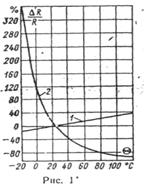
Рис. 3.5 – Залежність магнітної проникності фериту М600НН від температури
Як видно з рисунка, у вказаному діапазоні температур магнітна проникність фериту може змінюватися від 470 до 730. абсолютна похибка буде рівна:
Dmax=mmax-mmin(3.19)
Dmax=730-470=260
Відносна похибка в такому випадку визначається за формулою (3.18)

Як бачимо, зміна температури навколишнього середовища сильно впливає на результати вимірювання. Щоб усунути це негативне явище при обробці сигналу можна враховувати температуру навколишнього середовища та робити температурну поправку.
Дані похибки впливають лише на форму (амплітуду) дихальної кривої і ніяк не відображаються на частоті коливань. В завданні на самостійну роботу необхідно розробити ВП для вимірювання частоти дихання, тому можна вважати, що даний прилад задовольняє вихідні вимоги.
Щодо похибки в вимірюванні частоти дихання то, за рахунок явища зсуву фаз вихідного сигналу на 180о похибка може складати одне дихальне коливання за весь вимірювальний цикл.
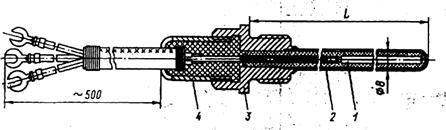
4 КОНСТРУЮВАННЯ ПЕРВИННОГО ВИМІРЮВАЛЬНОГО ПЕРЕТВОРЮВАЧА
4.1 Визначення діаметру дроту обмоток
Діаметр дроту обмотки визначається допустимою густиною струму, що протікає в котушці. Вона, в свою чергу залежить від матеріалу осердя та потужності розсіювання котушки. Потужність розсіювання визначається струмом через обмотку та індуктивним опором обмотки.
Похожие работы
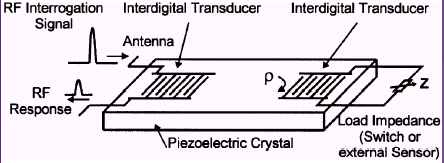
... чено раніше, якщо вибрати правильний напрямок поширення хвилі, можна створити бездротової датчик температури. Середовище поширення міняється разом з температурою, впливаючи на дані на виході. Нижче наведені деякі найбільш загальні способи застосування датчиків акустичних хвиль. Термодатчик будується на термозалежності швидкості поверхневих хвиль, яка визначається напрямком і типом кристалічного ...
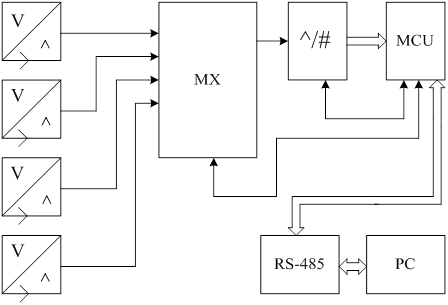
... габаритність та точність. Розглянемо першу структурну схему, яка приведена на рисунку 2.1. Рисунок 2.1 – Перший варіант реалізації структурної схеми системи для визначення складу вихлопних газів автомобілів Позначення на схемі: V/ – датчик концентрації, який використовується для визначення концентрації вихлопних газів автомобілів; МХ – мультиплексор; – аналого-цифровий перетворювач; ...
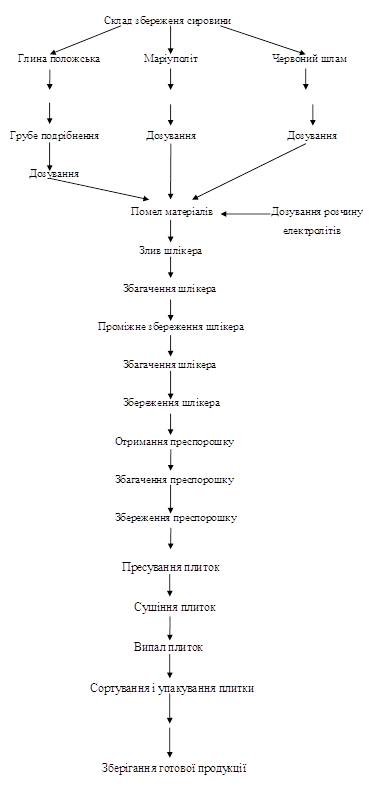
... ; 11 - канал конвеєра; 12 - відкрита частина конвеєра; 13,14,15 - вентилятори; 16 - теплообмінник Рисунок 2.6 - Потоково-конвеєрна лінія Буде встановлено 2 потоково-конвеєрних ліній для виробництва плиток для підлоги продуктивністю 400 тис м²/рік. 2.5.11 Розрахунок складу готової продукції При розрахунку складу готової продукції необхідно знати запас виробів, вид упаковки, площу, що ...
... обміну даними з ПЭВМ у процесі виконання програми користувача; 11. Вкажіть типи буферних схем, використаних в УУМС-2. Їх призначення та особливості роботи. 12. Дайте визначення адресного простору мікропроцесорної системи та розпишіть його розподіл в УУМС-2. Адресний простір УУМС складається з областей, состав яких показаний у табл.2. Варто звернути увагу, що внутрішні адресні області ...
0 комментариев