МАТЕМАТИЧЕСКАЯ МОДЕЛЬ И определение ПАРАМЕТРОВ ОБЪЕКТА УПРАВЛЕНИЯ
СИНТЕЗ САУ МЕТОДОМ ПОСЛЕДОВАТЕЛЬНОЙ ОПТИМИЗАЦИИ КОНТУРОВ
СИНТЕЗ АСТАТИЧЕСКОГО КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
СИНТЕЗ САУ СКОРОСТЬЮ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ПОКАЗАТЕЛЯМИ
СИНТЕЗ ЦИФРОВОГО УПРАВЛЯЮЩЕГО УСТРОЙСТВА
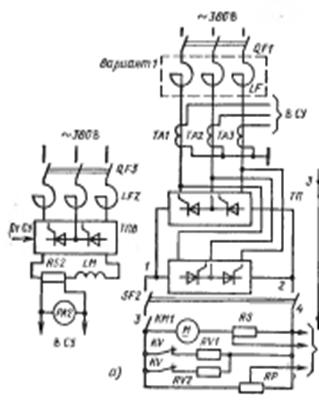
ПРОЕКТИРОВАНИЕ ПРИНЦИПИАЛЬНОЙ СХЕМЫ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
Навигация
СИНТЕЗ САУ МЕТОДОМ ПОСЛЕДОВАТЕЛЬНОЙ ОПТИМИЗАЦИИ КОНТУРОВ
Расчет САУ скоростью электродвигателя постоянного тока независимого возбуждения
18586
знаков
0
таблиц
19
изображений
3 СИНТЕЗ САУ МЕТОДОМ ПОСЛЕДОВАТЕЛЬНОЙ ОПТИМИЗАЦИИ КОНТУРОВ
Синтез – это определение структуры и параметров управляющего устройства, обеспечивающие заданные статические и динамические показатели.
Существуют следующие методы синтеза систем автоматического управления:
- метод параметрической оптимизации контуров,
- метод последовательной оптимизации контуров,
- метод модального управления,
- метод, основанный на теории оптимального управления.
В данной работе рассматриваются метод последовательной оптимизации контуров и метод модального управления.
Метод последовательной оптимизации контуров является более грубым (менее точным), т.к. он основан на радио допущениях. Причем синтез каждого контура рассматривается в отдельности без учета влияния их друг на друга. В настоящее время практически все электропривода рассчитываются данным методом.
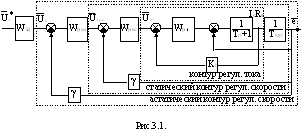
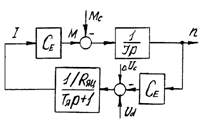
Структурная схема системы представлена на рис.3.1.
Система автоматического управления скоростью двигателя включает в себя три контура:
контур регулирования тока, здесь:
![]() - передаточная функция регулятора тока,
- передаточная функция регулятора тока,
![]() - коэффициент обратной связи по току.
- коэффициент обратной связи по току.
km=10/(Im*Ro)=10/(2*31.57*0.8)=0.2
где ![]()
· статический контур регулирования скорости
![]() - передаточная функция статического регулятора скорости.
- передаточная функция статического регулятора скорости.
![]() - сигнал задания для статического контура скорости
- сигнал задания для статического контура скорости
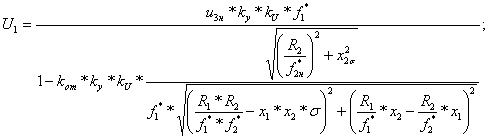
· астатический контур регулирования скорости
![]() - передаточная функция астатического регулятора скорости.
- передаточная функция астатического регулятора скорости.
3.1 СИНТЕЗ КОНТУРА РЕГУЛИРОВАНИЯ ТОКА
При синтезе контура тока принимаем допущение, что не учитывается внутренняя обратная связь по ЭДС двигателя.
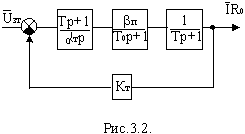 |
Структурная схема контура тока без учета обратной связи по скорости показана на рис. 3.2.
На основании структурной схемы можно записать:
![]()
Как видно из уравнения, регулятор тока компенсирует электромагнитную постоянную двигателя, но вносит инерционность, вызванную постоянной времени ![]() .
.
Передаточная функция будет иметь вид:

Характеристическое уравнение:
![]()
Принимаем корни управления согласно техническому оптимуму:
![]()
В соответствии с этим получим:

прировняв коэффициенты при одинаковых степенях p получим:
![]() (3.1)
(3.1)
![]() (3.2)
(3.2)
Подставив (3.1) в (3.2) получим:
am=2Tobпkm=2*0.005*25*0.2=0.05 c
sm=1/(2*0.005)=100
tp.m»3/sm=0.03 c
3.2 СИНТЕЗ СТАТИЧЕСКОГО КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
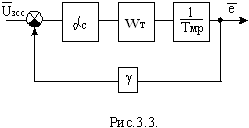 |
Структурная схема контура показана на рис. 3.3.
Передаточная функция контура регулирования тока имеет вид:
 ,
,
но ![]() , поэтому:
, поэтому:
![]() (3.3)
(3.3)
На основании структурной схемы и выражения 3.3 запишем передаточную функцию для статического контура регулирования скорости:
![]()

При синтезе контура скорости опять делается допущение, заключающееся в том, что не учитывается коэффициент при старшей степени p, т.е.
![]()
таким образом, передаточная функция будет иметь вид:
![]() .
.
Характеристическое уравнение имеет вид:
![]()
![]()
![]()
Приравняв коэффициенты при одинаковых степенях p получим:
1/2To=2scc Þ scc=1/2To=1/(2*0.005)=50
tpcc=3/scc=3/50=0.06
![]()
![]()
g=10/Uн=10/110=0,091
ac=kmTm/4Tog=(0.2*0.078)/(4*0.005*0.091)=8.6 c
Похожие работы
... : Kпмакс = 60/5=12 - Kпзад при заданном значении выпрямленного напряжения UdЗАД=СЕ×nЗАД=1,98×42=83,2(В) Kпзад=83,2/8=10 используется для построения ЛАЧХ САУ в заданном рабочем режиме. (22) 2. Анализ установившегося режима системы 2.1 Составление структурной схемы для установившегося режима Рисунок 11 - Структурная схема для установившегося режима Структурная схема дня ...
... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
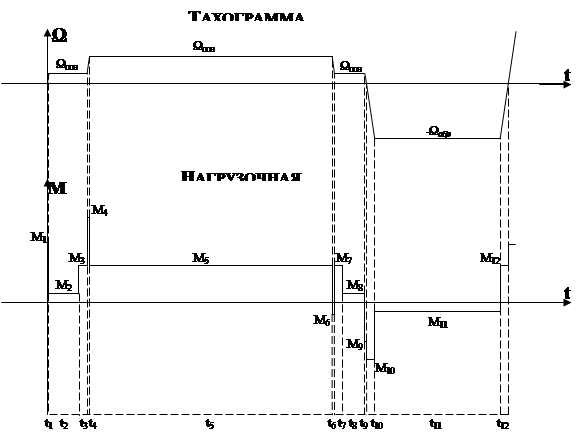
... , пройденный столом на интервале 11: Продолжительность интервала 11: Момент двигателя на интервале 5: Рисунок 4 Тахограмма и нагрузочная диаграмма электропривода механизма перемещения стола продольно-строгального станка. Нагрузочная диаграмма и тахограмма двигателя представлены на рисунке 4: 3.4 Проверка двигателя по нагреву Для проверки двигателя по ...
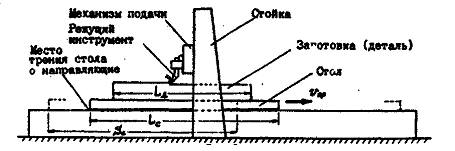
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
0 комментариев