МАТЕМАТИЧЕСКАЯ МОДЕЛЬ И определение ПАРАМЕТРОВ ОБЪЕКТА УПРАВЛЕНИЯ
СИНТЕЗ САУ МЕТОДОМ ПОСЛЕДОВАТЕЛЬНОЙ ОПТИМИЗАЦИИ КОНТУРОВ
СИНТЕЗ АСТАТИЧЕСКОГО КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
СИНТЕЗ САУ СКОРОСТЬЮ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ПОКАЗАТЕЛЯМИ
СИНТЕЗ ЦИФРОВОГО УПРАВЛЯЮЩЕГО УСТРОЙСТВА
ПРОЕКТИРОВАНИЕ ПРИНЦИПИАЛЬНОЙ СХЕМЫ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
Навигация
Расчет САУ скоростью электродвигателя постоянного тока независимого возбуждения
Расчет САУ скоростью электродвигателя постоянного тока независимого возбуждения
18586
знаков
0
таблиц
19
изображений
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РБ
БЕЛОРУССКАЯ ГОСУДАРСТВЕННАЯ
ПОЛИТЕХНИЧЕСКАЯ АКАДЕМИЯ
КАФЕДРА ЭАПУ и ТК
КУРСОВОЙ ПРОЕКТПО ДИСЦИПЛИНЕ “ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ”
НА ТЕМУ:
РАСЧЕТ САУ СКОРОСТЬЮ
ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
МИНСК
2008СОДЕРЖАНИЕ
Введение
1.Функциональная схема объекта управления
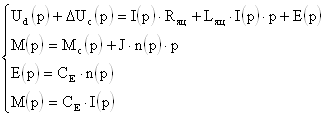
2.Математическая модель и определение параметров объекта управления
2.1.Математическая модель двигателя
2.2.Математическая модель преобразователя
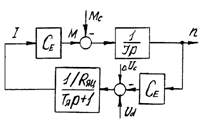
3.Синтез САУ методом последовательной оптимизации контуров
3.1.Синтез контура регулирования тока
3.1.Синтез статического контура регулирования скорости
3.3.Синтез астатического контура регулирования скорости
4.Синтез САУ методом модального управления
4.1.Синтез САУ без улучшенных динамических показателей
4.2.Синтез САУ скоростью с улучшенными динамическими показателями 5.Синтез САУ с использованием наблюдателя
6.Синтез цифрового управляющего устройства
7.Проектирование принципиальной схемы управляющего устройства
7.1.Расчет принципиальной схемы управляющего устройства, синтезированного методом последовательной оптимизации
7.2.Проектирование принципиальной схемы методом последовательной оптимизации контуров
7.3.Проектирование принципиальной схемы с использованием наблюдателя
Заключение
ВВЕДЕНИЕ
Основная задача управления электроприводами, работающими в режиме пуска, торможения и реверса, состоит в формировании диаграмм тока, обеспечивающей заданное время переходных процессов.
Основное назначение электроприводов, работающих в режиме автоматической стабилизации скорости состоит в автоматическом поддержании скорости или существовании заданного закона изменения скорости с помощью определяемой требованиями технологического процесса. Техническими параметрами подобных систем являются электроприводы механизмов подач металлорежущих станков, обеспечивающих широкий диапазон регулирования и поддержания заданной скорости каждого механизма в отдельности и поддержание заданных соотношений скоростей этих механизмов.
Большинство производственных электроприводов выполняется с наиболее простыми статическими системами регулирования. Для этих систем большое значение имеет получение статических характеристик, обеспечивающих требуемую мощность в установившихся режимах. В современных системах широко применяются астатические системы регулирования, использующие принцип инвариантности.
Для систем стабилизации скорости большое значение имеют показатели качества переходного процесса при возмущающем воздействии.
Режим пуска и торможения являются не основными и к ним в отношении быстродействия не предъявляются повышенные требования.
В особую группу электроприводов следует выделить электрические привода механизмов, для которых в одинаковой степени важны как режим автоматической стабилизации скорости, так и режим пуска и торможения. К этой группе относятся механизмы, в которых время пуска, торможения и реверса соизмеримо со временем установившегося режима движения.
Как правило, структура современного электропривода, работающего в режиме автоматической стабилизации скорости, представляет собой замкнутую контурную систему автоматического регулирования, содержащую главную регулируемую обратную связь и дополнительные обратные связи.
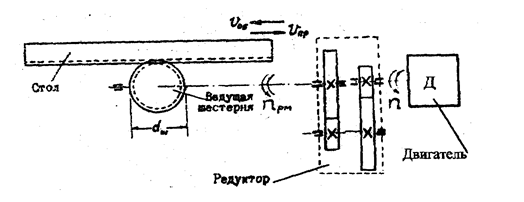
1 ФУНКЦИОНАЛЬНАЯ СХЕМА ОБЪЕКТА УПРАВЛЕНИЯ
В качестве объекта управления используется управляемый полупроводниковый выпрямитель, двигатель постоянного тока независимого возбуждения типа 2ПН-132МУХЛ4. Вал двигателя соединен с тахогенератором.
Выписываем из справочника параметры двигателя:
Pн=2,5кВт
Nн=1000 об¤мин;
Nм=4000 об¤мин;
Rя=0,27 Ом;
Rдп=0,2;
Lя.ц=5,7мГн;
Jд. =0,038 кг*м^2.
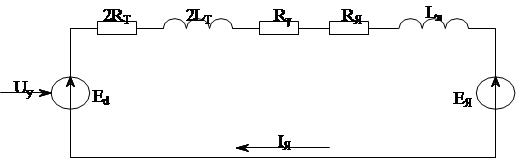
Вентильный преобразователь представлен апериодическим звеном:
![]() ; Tо=0,005с; bп=25.
; Tо=0,005с; bп=25.
Статические характеристики: ![]()
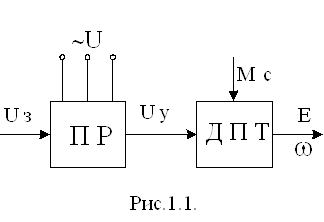
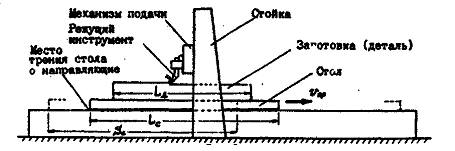
Функциональная схема объекта управления представлена на рис.1.1. Здесь введены следующие обозначения:
![]() - управляемый преобразователь электроэнергии;
- управляемый преобразователь электроэнергии;
![]() - двигатель постоянного тока;
- двигатель постоянного тока;
![]() - напряжение управления преобразователем;
- напряжение управления преобразователем;
![]() - выходное напряжение преобразователя (зависит от
- выходное напряжение преобразователя (зависит от ![]() );
);
![]() - угловая скорость электродвигателя.
- угловая скорость электродвигателя.
Похожие работы
... : Kпмакс = 60/5=12 - Kпзад при заданном значении выпрямленного напряжения UdЗАД=СЕ×nЗАД=1,98×42=83,2(В) Kпзад=83,2/8=10 используется для построения ЛАЧХ САУ в заданном рабочем режиме. (22) 2. Анализ установившегося режима системы 2.1 Составление структурной схемы для установившегося режима Рисунок 11 - Структурная схема для установившегося режима Структурная схема дня ...
... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
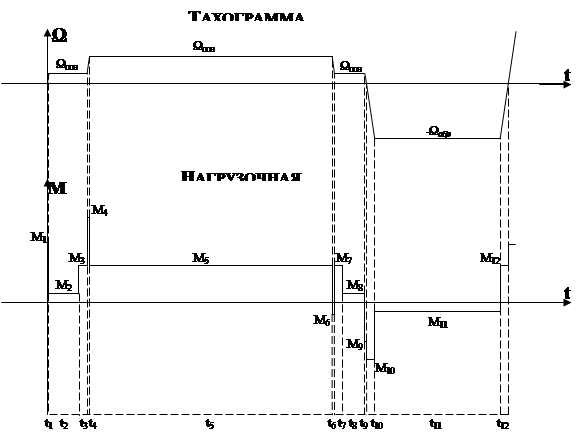
... , пройденный столом на интервале 11: Продолжительность интервала 11: Момент двигателя на интервале 5: Рисунок 4 Тахограмма и нагрузочная диаграмма электропривода механизма перемещения стола продольно-строгального станка. Нагрузочная диаграмма и тахограмма двигателя представлены на рисунке 4: 3.4 Проверка двигателя по нагреву Для проверки двигателя по ...
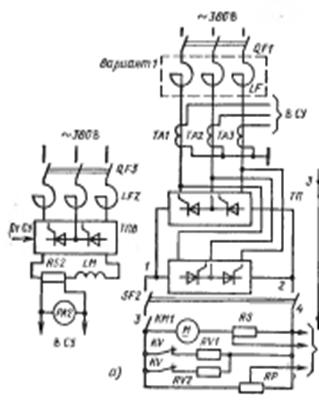
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
0 комментариев