Навигация
Проверка устойчивости и качеств переходного процесса
24567
знаков
2
таблицы
15
изображений
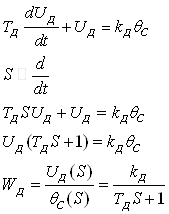
4.4 Проверка устойчивости и качеств переходного процесса
Для оценки качества и точности системы с полученным корректирующим звеном построим переходный процесс системы с коррекцией, предварительно получив передаточную функцию замкнутой системы.
После коррекции, система имеет передаточную функцию прямой цепи ![]() , определяемую по (4.9). Следовательно, передаточная функция замкнутой цепи имеет вид:
, определяемую по (4.9). Следовательно, передаточная функция замкнутой цепи имеет вид:

![]()
Определим устойчивость этой системы по критерию Гурвица. Для этого составляем определитель.
![]()
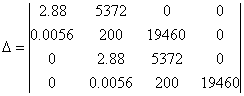
D1=63998944602>0
D2=2740854>0
D3=546>0
D4=2.88>0
=> Система устойчива.
Переходный процесс замкнутой системы:
Рисунок 4.2 – Переходный процесс замкнутой системы
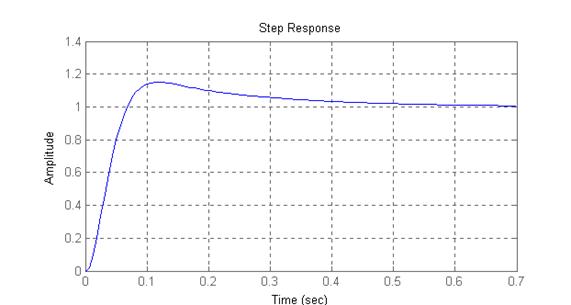
Из рисунка 4.2 видно, что переходный процесс на выходе полученной системы удовлетворяет требуемым характеристикам: ![]() ,
, ![]() .
.
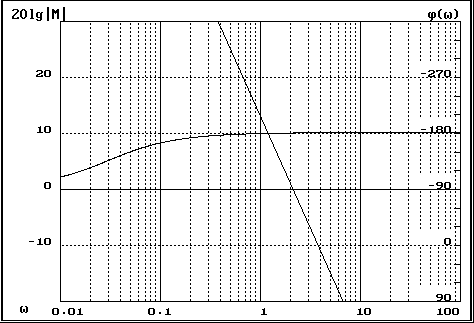
С помощью годографа Найквиста найдем запасы по амплитуде и фазе (рисунок 4.3).
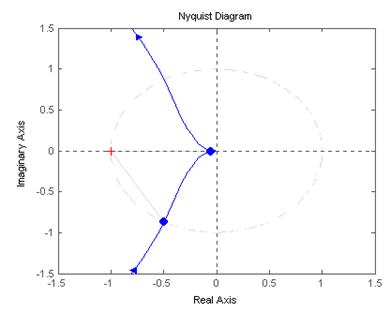
Рисунок 4.3 – Годограф Найквиста
Запас по амплитуде Аз = 25.2 дБ (при w* = 186 рад/с),
запас по фазе gз = 60.1° (w** = 26 рад/с)
Реальное корректирующее устройство содержит балластное апериодическое звено, в данном случае - первого порядка с единичным коэффициентом усиления и постоянной времени ТВ=0,01Т.
Wb(s)=![]() – передаточная функция балластного звена (апериодическое звено первого порядка).
– передаточная функция балластного звена (апериодическое звено первого порядка).
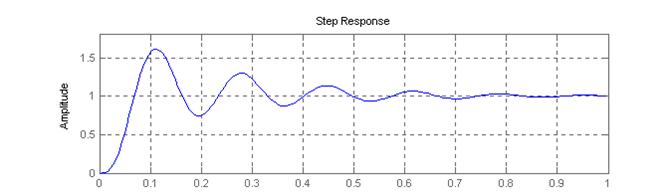
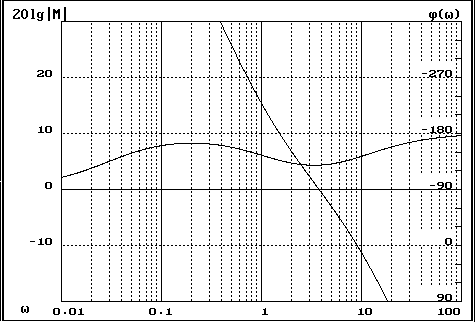
Оценим влияние балластного звена, построив переходную характеристику системы.
Рисунок 4.4 - Переходный процесс системы с балластным звеном
Таким образом, как видно из графика переходного процесса рисунка 4.4, балластное звено значительно влияет на перерегулирование, которое увеличилось почти в два раза, и лишь немного - на время регулирования:
![]() ,
, ![]() .
.
5 РЕАЛИЗАЦИЯ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
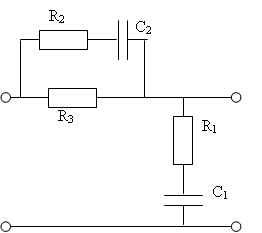
Реализовать физически корректирующее звено с передаточной функцией (4.8) можно с помощью следующей схемы.
 | |||
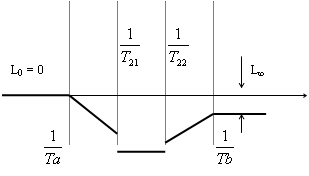 |
Рисунок 4.4 – Схема реализации корректирующего звена, соответствующего ЛАЧХ регулятора
![]() , T22 < T21
, T22 < T21
 | |||

Параметры Т21, Т22, 1, 2 определяются следующими выражениями:
![]()
 ;
;
Для полученного регулятора
Параметры элементов схемы, представленной на рисунке 5.3 определяются следующим образом.
Выбор элементов.
КУ1 = 1, КУ2 = 1.
Конденсатор С1 принадлежит классу электролитических конденсаторов (КЭ), отличающихся малыми размерами при большой емкости, но имеющих довольно большие токи утечки и потери.
Примем
С1 = 0.0005 (Ф) = 500 (мкФ), тогда
R1 = 460 (Ом),
R2 = 25 (Ом),
R3 = 399104 (Ом) = 399.1 (кОм),
С2 = 0.6 (мкФ).
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте спроектирована система автоматического регулирования угла поворота вала электродвигателя. Объектом управления такой системы является вращающийся вал, нагруженный моментом ![]() . Цель управления состоит в обеспечении угла
. Цель управления состоит в обеспечении угла ![]() поворота вала ЭД, близкого к заданной величине
поворота вала ЭД, близкого к заданной величине ![]() , которая может изменяться во времени. Для достижения этой цели спроектирована система с обратной связью.
, которая может изменяться во времени. Для достижения этой цели спроектирована система с обратной связью.
Оценки качества и точности проектируемой системы удовлетворяют техническому заданию:
ошибка от помехи |eN| ![]() 0.5;
0.5;
минимальная частота помехи ![]() = 310 (рад/c);
= 310 (рад/c);
время регулирования tР![]() 2 (с);
2 (с);
перерегулирование системы s ![]() 15%.
15%.
Разработано техническое задание, в котором и учтены все требования, необходимые для нормального функционирования системы, в том числе условия ее эксплуатации.
Согласно исходным данным, рассчитан исполнительный двигатель: определена требуемая мощность двигателя, по значению которой выбран тип двигателя. В процессе расчета регулятора пришли к выводу, что для обеспечения устойчивости системы и хороших показателей ее качества и точности существует необходимость введения корректирующего звена, в связи с тем, что при полученных параметрах передаточной функции (коэффициенте усиления k и постоянной времени Т) система неустойчива. С учетом корректирующего звена проведен анализ качества и точности системы. Скорректированная система имеет перерегулирование ![]() и время регулирования системы
и время регулирования системы ![]() с.
с.
Реальное корректирующее устройство содержит балластное апериодическое звено, в данном случае - первого порядка с единичным коэффициентом усиления и постоянной времени ТВ=0,01Т. Анализируя график переходного процесса системы с балластным звеном, можно заметить, что оно значительно влияет на перерегулирование и лишь немного - на время регулирования:
![]() ,
, ![]() .
.
Список используемых источников
1 Справочник по электрическим машинам: т.2 п/ред. Копылова И.П., Клочкова Б.К. -М.: Энергоатомиздат, 1988.
2 Топчеев Ю.И., Атлас для проектирования систем автоматического регулирования. – М.: Машиностроение, 1989
3 Справочник радиолюбителя п/ред. Терещук Р.М.- Киев.: Государственное издательство технической литературы, 1962
Похожие работы
... управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном ...
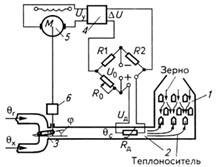
... и расширение знаний по теории автоматического управления, развитию навыков и применение современных инженерных навыков, в том числе и с применением ЭВМ при разработке и изучению реальных САУ. Система автоматического регулирование температуры теплоносителя зерносушилки На рис. 3 показана схема САР температуры теплоносителя, поступающего в шахтную зерносушилку 1 из камеры смешивания 2, которая ...
... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... проведение погрузочно-разгрузочных работ и расширить возможности модульной комплектации ТС для транспортировки крупногабаритных грузов. Создание системы стабилизации ПКП является актуальной задачей. 2.1. Постановка задачи Требуется разработать систему автоматической стабилизации пневмоколесной платформы для перевозки крупногабаритных грузов. Система должна обеспечивать горизонтальное ...
0 комментариев