Навигация
ВЫБОР И РАСЧЕТ ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА
24567
знаков
2
таблицы
15
изображений
2 ВЫБОР И РАСЧЕТ ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА
Выбор исполнительного устройства будем осуществлять на основе минимизации требуемого момента инерции на валу двигателя и оптимизации ускорения движения нагрузки по передаточному числу редуктора.
2.1 Выбор двигателя
Исходными данными для выбора двигателя являются:
момент инерции в нагрузке Jн=0.5 (кг∙м2)
2) момент в нагрузке ![]() = 18 (Н×м);
= 18 (Н×м);
скорость вращения (максимальная) в нагрузке ![]() (рад/с);
(рад/с);
4)
ускорение в нагрузке ![]() (рад/с2);
(рад/с2);
Определяем максимальный момент Мн и мощность Рн в нагрузке.
Мн=Jн× ![]() +
+![]() , [Н×м] (2.1)
, [Н×м] (2.1)
Мн =0.5× 2,1+18=19,05 [Н×м]
Рн=Мн×![]() ,
[Вт] (2.2)
,
[Вт] (2.2)
Рн=19,05× 2,1=40,005 [Вт]
Требуемая мощность двигателя определяется по формуле:
Ртр=2× Рн/h, [Вт] (2.3)
По полученной мощности Рн определяем К.П.Д. из условия:

Так как Рн<100 Вт, то =0.85 и требуемая мощность:
Ртр= 2×40/0.85=94 [Вт]
Выбор двигателя производится по номинальной мощности двигателя, которая должна быть больше Ртр.
Исходя из этого условия, выбираем двигатель 4ПБ80А1.
Данный двигатель принадлежит к классу двигателей постоянного тока.
Двигатель класса 4ПБ представляет собой двигатель с естественным охлаждением.
Применимые условия эксплуатации – нормальные, соответствующие значениям климатических факторов: высота над уровнем моря до 1000м, температура окружающей среды от 1 до 40 С, относительная влажность 80 % при t=20С.
Показатели надежности:
средний срок службы при наработке 30000 часов не менее 12 лет. Вероятность безотказной работы за период 10000 часов >0.8 при доверительной вероятности 0.7, наработке щеток 0.8, коэффициенте готовности 0.9.
Габариты двигателя:
длина – 385 мм, ширина – 125 мм, высота – 214 мм, масса – 16 кг.
Данный двигатель имеет технические данные:
номинальная мощность, при исполнении Рном = 370 [Вт]
максимальная частота вращения fmax = 4000 [об/мин]
номинальная частота вращения fном = 3000 [об/мин]
4) напряжение Uном = 220 [В]
5) номинальный вращающий момент Мном = 1.2 [Н∙м]
момент инерции Jдв = 1.7×10-2 [кг∙м2]
Определим wном : wном=2∙p∙fном/60 [рад/c] (2.4)
wном= 2×3.14×3000/60=314.159 [рад/c]
Определим wхх : wхх=2∙p∙fmax/60 [рад/c] (2.5)
wхх= 2×3.14× 4000/60=418.879 [рад/c]
Момент инерции вычисляется по формуле:
Jд=Jдв+Jp, [кг×м2] (2.6)
где Jр – момент инерции редуктора:
Jр=0.1∙Jдв, [кг×м2]
Jд= 0.1∙0.017+0.017=0.0187 [кг∙м2]
Вычислим оптимальное число редуктора:
ip=![]() (2.7)
(2.7)
ip=![]() =23,88.
=23,88.
Определим максимальный момент двигателя по первой форме уравнения баланса – с использованием приведенного момента инерции:
Мдв![]() ∙ан∙ip + Мнс/ip∙h, [Н∙м] (2.8)
∙ан∙ip + Мнс/ip∙h, [Н∙м] (2.8)
где
![]() - момент инерции, приведенный к валу двигателя
- момент инерции, приведенный к валу двигателя
![]() Jд+
Jд+![]() ,
[кг∙м2]
,
[кг∙м2]
![]() 0.019 [кг∙м2]
0.019 [кг∙м2]
Мдв=0.019∙2,1∙23,88+18/(23,88∙0.85)= 1.8 [Н∙м]
Рассчитаем перегрузочную способность по моменту:
м=Mдв/Мном (2.9)
м=1.8/1.2=1.5
Данное значение м удовлетворяет условию м![]() 3.
3.
Определим перегрузочную способность по скорости:
ω=ωd/ωном, (2.10)
где ωd=Ωн∙ip.
Тогда ωd=5∙23,88=119
ω=119/314.159=0.38
Данное значение ω удовлетворяет условию ω ![]() 1.3
1.3
Так как м (2.9)иω (2.10) удовлетворяют указанным ограничениям, то двигатель выбран правильно.
Похожие работы
... управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном ...
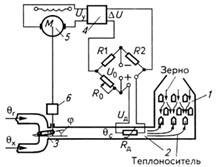
... и расширение знаний по теории автоматического управления, развитию навыков и применение современных инженерных навыков, в том числе и с применением ЭВМ при разработке и изучению реальных САУ. Система автоматического регулирование температуры теплоносителя зерносушилки На рис. 3 показана схема САР температуры теплоносителя, поступающего в шахтную зерносушилку 1 из камеры смешивания 2, которая ...
... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... проведение погрузочно-разгрузочных работ и расширить возможности модульной комплектации ТС для транспортировки крупногабаритных грузов. Создание системы стабилизации ПКП является актуальной задачей. 2.1. Постановка задачи Требуется разработать систему автоматической стабилизации пневмоколесной платформы для перевозки крупногабаритных грузов. Система должна обеспечивать горизонтальное ...
0 комментариев